基于硬件在环仿真的城市路网交通控制平台
2019-04-22 00:18唐少虎刘小明郑建春郑国荣
重庆交通大学学报(自然科学版) 2019年4期
唐少虎, 刘小明, 朱 伟, 郑建春, 郑国荣
(1. 北京市科学技术研究院 北京城市系统工程研究中心,北京 100035;2. 北方工业大学 城市道路交通智能控制技术北京市重点实验室,北京 100144)
0 引 言
针对城市道路交通拥堵问题,采用合理有效的交通信号控制方法可缓解交通拥堵,并防止拥堵的进一步加剧。但对实际交通控制效果进行评价时,需进行大量的交通调查和统计,存在费时、费力等问题。硬件在环仿真将实际应用的硬件设备融合在虚拟仿真软件中,虚实结合的方式建立贴近现实的互动环境,从而形成更加逼真的软硬件联动的闭环仿真。而交通信号控制硬件在环仿真可将现场应用的交通信号控制系统融入到交通仿真软件中,通过仿真软件的评价功能实现对信号控制效果的精确评价。相比于传统仿真系统,硬件在环仿真具备接入实际信号控制系统、通过数据交互建立虚拟运行场景与实际控制设备之间的紧密联系并对真实系统的控制效果进行准确评价等特点。
为此,国内外学者针对交通信号控制的硬件在环仿真开展了一些研究工作。路易斯安那大学T. URBANIK等[1]最早对硬件在环仿真方法进行了研究;P. J. K. KOONCE等[2]基于硬件在环系统,结合特定道路交叉口仿真,使用成对统计方法对交通控制策略效果进行了评价;D. BULLOCK等[3]结合信号控制器、交通仿真软件设计了用于评估SCOOT、SCATS等闭环控制系统的硬件在环方法;张欣等[4]将硬件在环仿真技术应用于HEV动力总成控制单元的设计开发和功能测试;王建强等[5]开发了安全车距保持技术的硬件在环仿真试验系统,可检验控制器及执行器的性能、设计控制算法等;I. YUN等[6]应用硬件在环仿真对单交叉口的信号自适应控制系统进行了仿真评价,结果表明优于传统的感应控制系统;进一步,M. HUNTER等[7]将硬件在环仿真用于多交叉口自适应控制评价,通过实际测试表明,在高峰时段自适应控制系统控制效果好于多时段定时控制;于泉等[8]提出设计一种交通控制硬件在环实时一体化仿真平台,从而建立符合交通控制实际情况的实时一体化仿真环境;余贵珍等[9]采用硬件在环的方法,建立了基于交通微观仿真软件的多路口交通信号控制硬件在环仿真系统,对多路口的交通信号控制系统的控制效果进行评估;苗挺[10]设计了基于VISSIM的交通控制硬件在环仿真系统,实现了对交通信号机控制策略的评价比较。
交通信号控制硬件在环仿真研究已取得较为丰富的研究成果,但是还存在两个方面的问题:一方面,大部分研究主要针对单交叉口,多路口一般也是干线的几个路口,并未对路网包含较多路口的区域进行在环仿真研究;另一方面,针对一种特定的交通控制系统,没有建立统一的平台中心系统,不适用于不同的交通控制系统,兼容扩展性不足。
因此,笔者设计并实现了一种基于硬件在环仿真的城市路网交通控制平台,融合交通控制器和交通仿真软件,基于平台中心系统,实现对单交叉口、干线协调以及区域协同控制进行硬件在环仿真,并准确评价交通控制效果。
1 城市路网交通控制平台设计
1.1 硬件在环仿真机制
硬件在环仿真系统一般由交通信号控制器、交通仿真软件以及控制器接口设备构成,如图1。硬件在环仿真系统可将交通信号控制器与交通仿真软件连接起来,实现融合交通信号控制器硬件的在环仿真,并利用交通仿真软件对相关指标的评价实现对信号控制效果的精确评价。
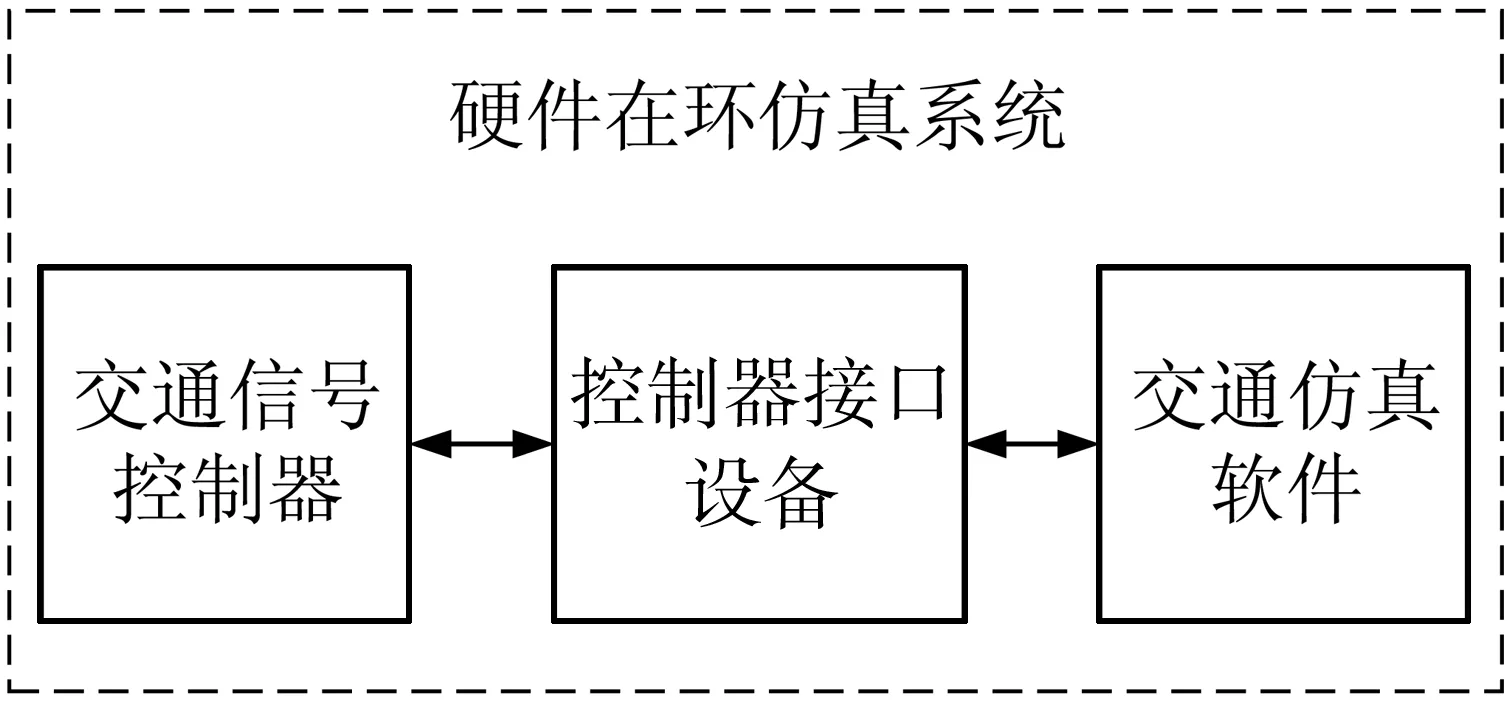
图1 硬件在环仿真系统构成Fig. 1 Hardware-in-the-loop simulation system
在平台中,交通仿真软件不实现控制功能,只对实际的城市路网建立路网交通模型,接收实际交通控制器的控制信号,其控制模块同步执行该控制信号,并输出交通流数据和仿真评价结果。交通控制器接收并执行平台中心系统的控制指令,并将信号控制执行信息实时反馈给交通仿真软件,实现控制仿真软件中的交通流对象。控制器接口设备不具备任何控制指令生成、交通流数据产生等功能,其存在是起到由平台系统下发的控制指令、交通仿真软件的仿真数据以及交通控制器的控制状态等数据信息的中转和传递作用。
1.2 平台逻辑框架设计
城市路网交通控制平台具备单点特殊控制(定时控制、感应控制、自适应控制)、干线绿波带控制、路网分布式协同控制等算法的加载及仿真效果分析功能。
城市路网交通控制平台基本逻辑和运行机制如下:平台中心系统通过控制器接口设备实时接收仿真软件交通流检测数据。交通数据经后台控制算法计算分析,得出符合当前交通状态的最佳信号控制方案,再通过控制器接口设备向实际信号机下发控制指令。交通仿真软件中的信号控制模块实时接收实际信号机的灯色状态并同步执行控制方案,实时对仿真交通进行信号控制。全部过程实现了硬件在环控制和软件仿真,从而形成完整的闭环反馈控制。
平台的逻辑框架及数据流传递示意如图2。

图2 城市路网交通控制平台逻辑框架示意Fig. 2 Logical framework of traffic control platform for urban network
1.3 平台架构设计
根据上述逻辑框架设计内容,控制平台主要功能包括实现单点信号控制、干线协调控制、区域协同控制以及仿真评价功能,分别对应单点控制模块、干线协调模块、区域协同模块以及仿真评价模块。平台后台集成了针对不同控制方式和控制目标的配时方案库、仿真参数库、仿真评价库以及控制算法库等,并通过控制器接口设备与交通控制器和交通仿真软件进行两两数据交互,实现平台控制方案和仿真参数分别下发交通控制器和交通仿真软件、交通仿真软件检测数据上传控制平台以及交通仿真软件控制方案和交通控制器控制方案的实时同步。
结合控制平台的设计功能和核心模块,考虑控制器接口设备基本作用和中转地位以及交通仿真软件与交通控制器实时运行和同步交互的在环仿真功能,设计城市路网交通控制平台架构,如图3。由图3可以看出:城市路网交通控制平台结构上主要分为3层,即位于底层的交通仿真软件与交通控制器、位于中间连接层的控制器接口设备、以及位于上层的城市路网交通控制平台中心系统。

图3 城市路网交通控制平台架构Fig. 3 Architecture of traffic control platform for urban network
单点控制模块不仅具备定时控制、感应控制、多时段控制、自适应控制等控制方式,还实现了包括黄闪控制、全红控制和人工校时等特殊控制方式。该模块可实时显示检测器占有率、排队长度、平均流量和平均延误等实时交通流检测数据,可实时监控单点信号控制运行状态。
干线协调模块具备多时段干线协调、自适应干线协调等功能,实现了干线协调参数的自动调整并计算正反向滤波带宽,可根据各路口饱和流量、非饱和流量、周期、绿信比等计算红灯排队消散时间,可实时监控干线协调运行状态。
区域协同模块具备区域自适应控制、路网子区协同控制等控制方式。该模块具备了控制子区设置、控制方案选择并监测路网内部平均排队长度、路网延误等运行指标等功能,通过平台接口可对路网交通控制算法进行二次开发,实现不同控制目标,并可实时监控路网交通信号协同控制运行状态。
仿真评价模块具备对当前控制方式的效果评估功能,从延误时间、停车次数、排队长度等仿真结果指标评价控制方案的有效性和可行性。
2 城市路网交通控制平台实现
2.1 平台中心系统
平台中心系统具备与交通仿真软件和控制器接口设备进行数据交互的功能,能够下发交通信号控制指令,能够接收流量、占有率、排队长度等交通检测数据并进行分析、验证、显示,可完成路口、干线、路网多种交通信号控制策略的仿真验证。为实现上述功能,利用VB.NET、SQL Server进行相应模块的开发。
2.1.1 单点信号控制
城市路网交通控制平台能够实现交通信号单点固定配时方案、手动控制方案、本地感应控制方案、本地多时段控制方案以及自适应控制方案下发到交通信号控制器的功能,并实时接收交通仿真软件上传的交通仿真指标信息,包括交通流量数据、占有率、平均延误以及排队长度等,如图4、图5。
单点信号控制借鉴文献[11]的目标函数,考虑到不同的交通流量,其延误和停车次数对交叉口综合效益的影响程度不同,将延误与停车次数综合考虑作为目标函数,寻找函数的最小值。优化模型如:

(1)
式中:f(x)为交叉口综合效益值;di为第i相位的平均延误;qi为第i相位实际到达的当量交通量,pcu/h;hi为第i相位车辆平均停车次数;β为考虑延误和停车次数对交叉口交通效益影响的加权系数。
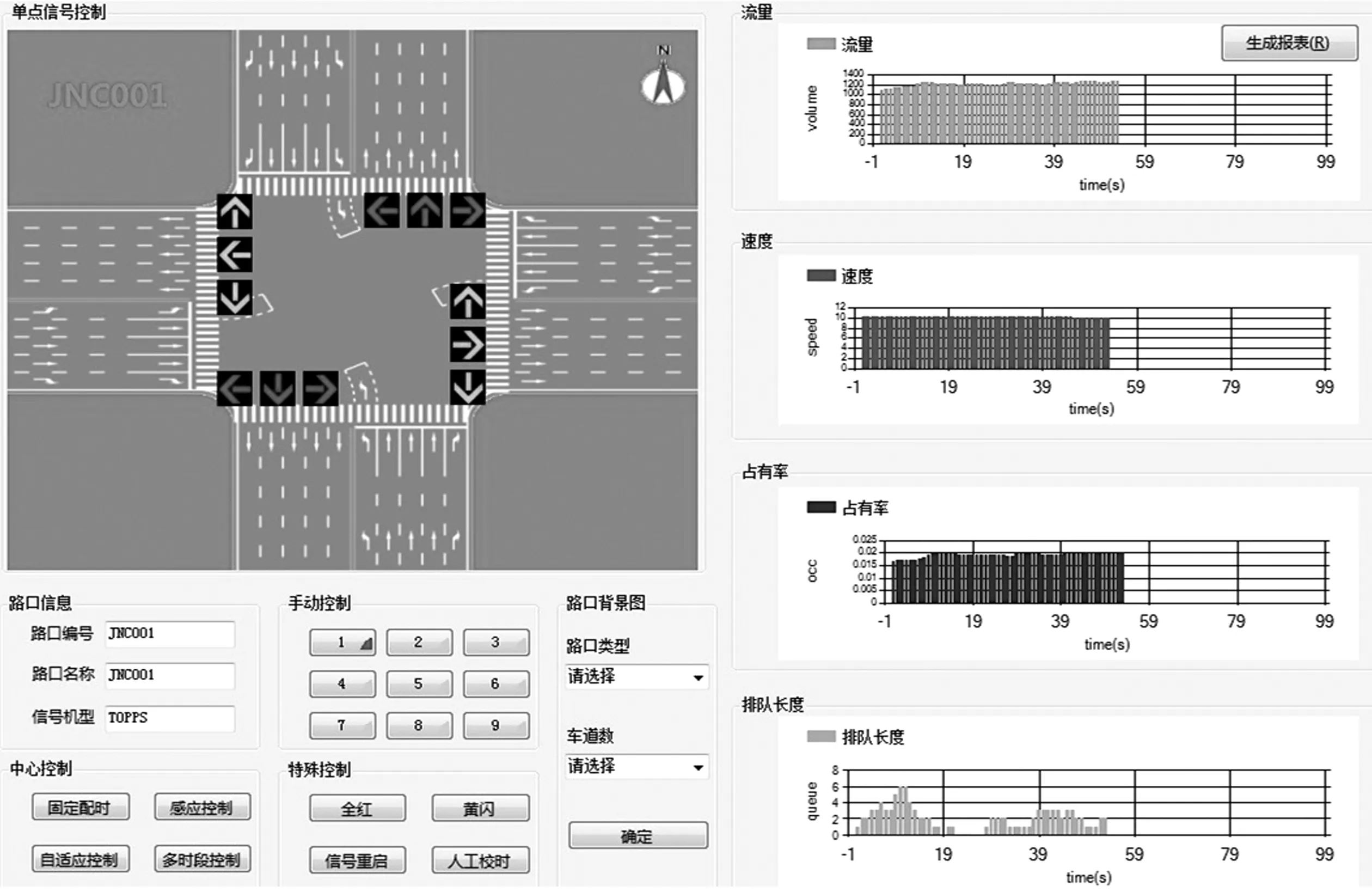
图4 平台中心系统Fig. 4 Platform center system
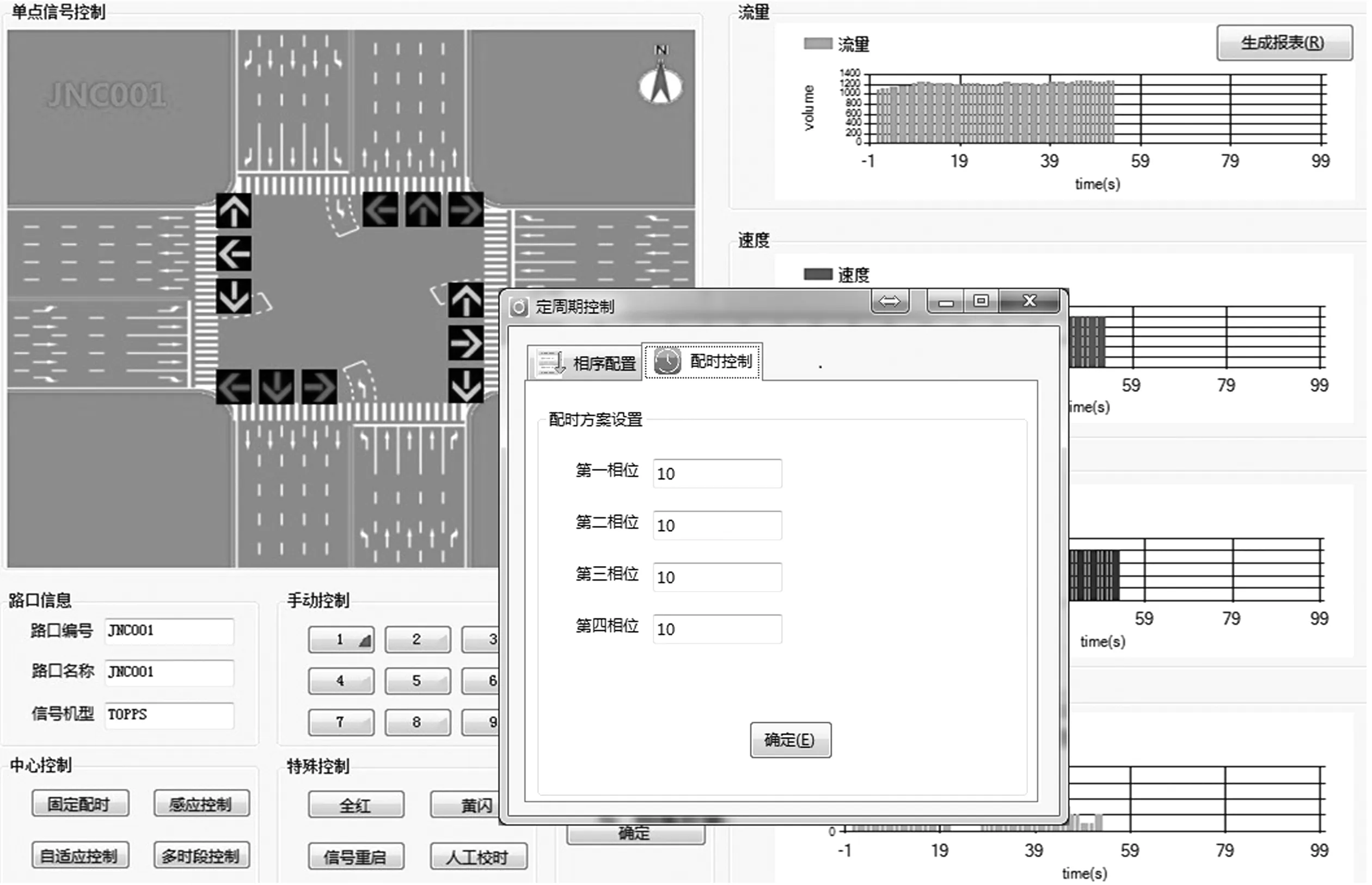
图5 单点定时控制及仿真效果分析界面Fig. 5 Analysis interface of single intersection timing control and simulation results
2.1.2 干线协调控制
城市路网交通控制平台具备干线交通绿波带控制配时功能,平台的干线绿波协调模块根据输入的路口信息以及设置的正反向绿波带速等数据,后台干线协调算法自动计算分析符合当前条件的绿波配时方案,并将该干线绿波协调控制参数下发至干线相关的交通信号控制器,如图6。
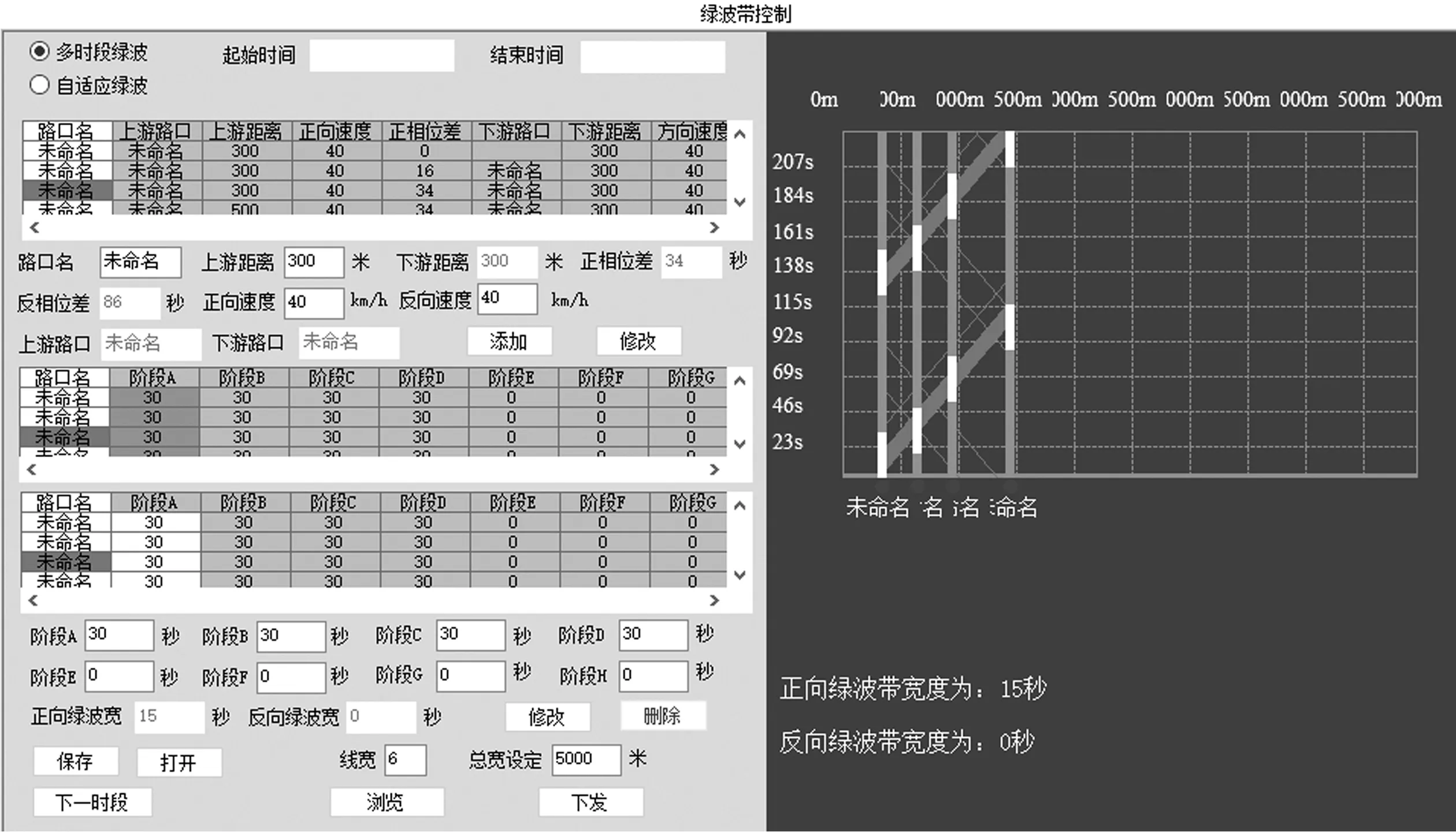
图6 平台干线绿波协调控制Fig. 6 Platform artery green wave coordinated control
采用文献[12]中的协调算法,即考虑路口协调相位不同方向交通放行的重要程度,为使绿波带宽时间内通过车辆最多,建立协调模型如:
(2)

2.1.3 区域协同控制
区域协同控制模块根据交通仿真软件上传到交通流的数据,经算法计算分析得到符合当前交通状况的最佳区域协同控制方案,并通过控制器接口设备将协同控制方案下发实际交通信号控制器,通过交通信号控制器与交通仿真软件信号控制模块的同步执行,使得协同控制方案作用于交通仿真软件中的交通流。最后,交通仿真软件将区域控制效果数据指标上传平台,通过对相关运行指标的数据分析,可对协同控制方案的效果进行评估并迭代改进,该模块中心系统如图7。
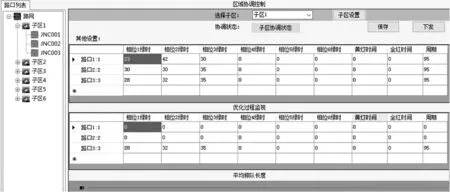
图7 平台区域协同控制模块Fig. 7 Platform region cooperative control module
利用文献中[13]的区域过饱和交通信号优化控制算法,通过过饱和区域边界需求控制,对进入过饱和区域的交通需求和通行压力进行总体控制并最大化区域的输出通行能力,数学模型如:
(3)

通过区域内部均衡控制,均衡区域路段空间占有率,平衡区域内部的交通需求以缓解区域内交通通行压力,数学模型如:
(4)

2.2 控制器接口
控制器接口设备采用单片机技术,一方面能将平台中心系统下发的控制指令数字信号转换为信号机控制信号;另一方面,将信号机灯态信号转换为计算机能够识别的数字信号,从而实现控制交通仿真软件中信号控制模块的信号状态。
控制器接口设备主要包括信号机连接板、光耦隔离板以及信号处理CPU板。其中,信号机连接板的主要功能是接入实际交通信号控制器的灯色信号,实现对信号控制器的信号灯色状态进行信息感知,如图8。
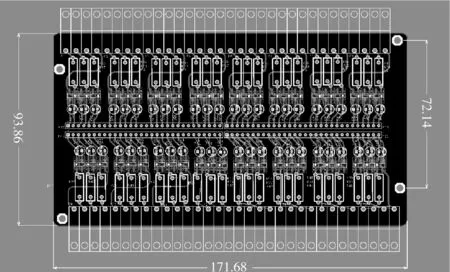
图8 信号机连接板Fig. 8 Signal controller connecting plate
光耦隔离板的主要功能是防止信号处理CPU板与信号机连接板的直接连接而引起的强电干扰,使被隔离的信号机连接板与信号处理CPU板之间没有电的直接连接,实现输入CPU板单片机的信号由电压信号改变为TTL电平信号的功能。信号处理CPU板的主要功能是对经过光耦隔离处理后的控制信号进行编码、打包等一系列处理,再通过串口或网口等接口发送处理后的控制信号,按照通信协议完成对实际信号控制器控制信号的输出,如图9。
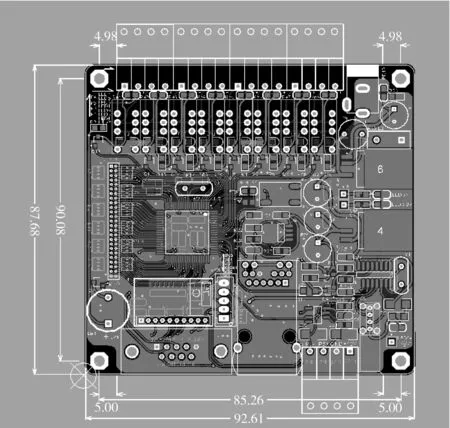
图9 信号处理CPU板Fig. 9 CPU plate for signal processing
2.3 平台通讯测试
平台通信测试是指平台的中心系统与交通信号控制器以及交通仿真软件与交通控制器之间传输数据信息的可靠性和准确性测试,通过测试确保平台软硬件之间的数据通信能够保持较好的实时性,保证信息传递的正确完整。
2.3.1 交通信号控制器
城市路网交通控制平台中交通信号控制器选择的型号为北方工业大学城市道路交通智能控制技术北京市重点实验室研发的TOPPS-TSC交通信号控制器,其采用模块化设计,由主控模块、电源模块、相位驱动模块等组成。TOPPS-TSC智能道路交通信号控制机具有逻辑信号输入和输出端口,其中,输出端口为分组独立设置,如图10。
2.3.2 软硬件通信测试
为了保证控制参数等数据能够不丢包的准确传送,采用基于面向连接的数据传输方式进行信息传递。通过建立基于TCP/IP的网络通信协议实现平台中心系统软件与交通信号控制器以及交通仿真软件与交通控制器之间的信息通信目的。建立基于TCP/IP协议的服务器端客户端模式,如果保证通信正常运行,须满足下面条件:
1)服务器端保持在运行状态。
2)给客户端提供服务器端的监听端口号码和服务器端的IP地址。
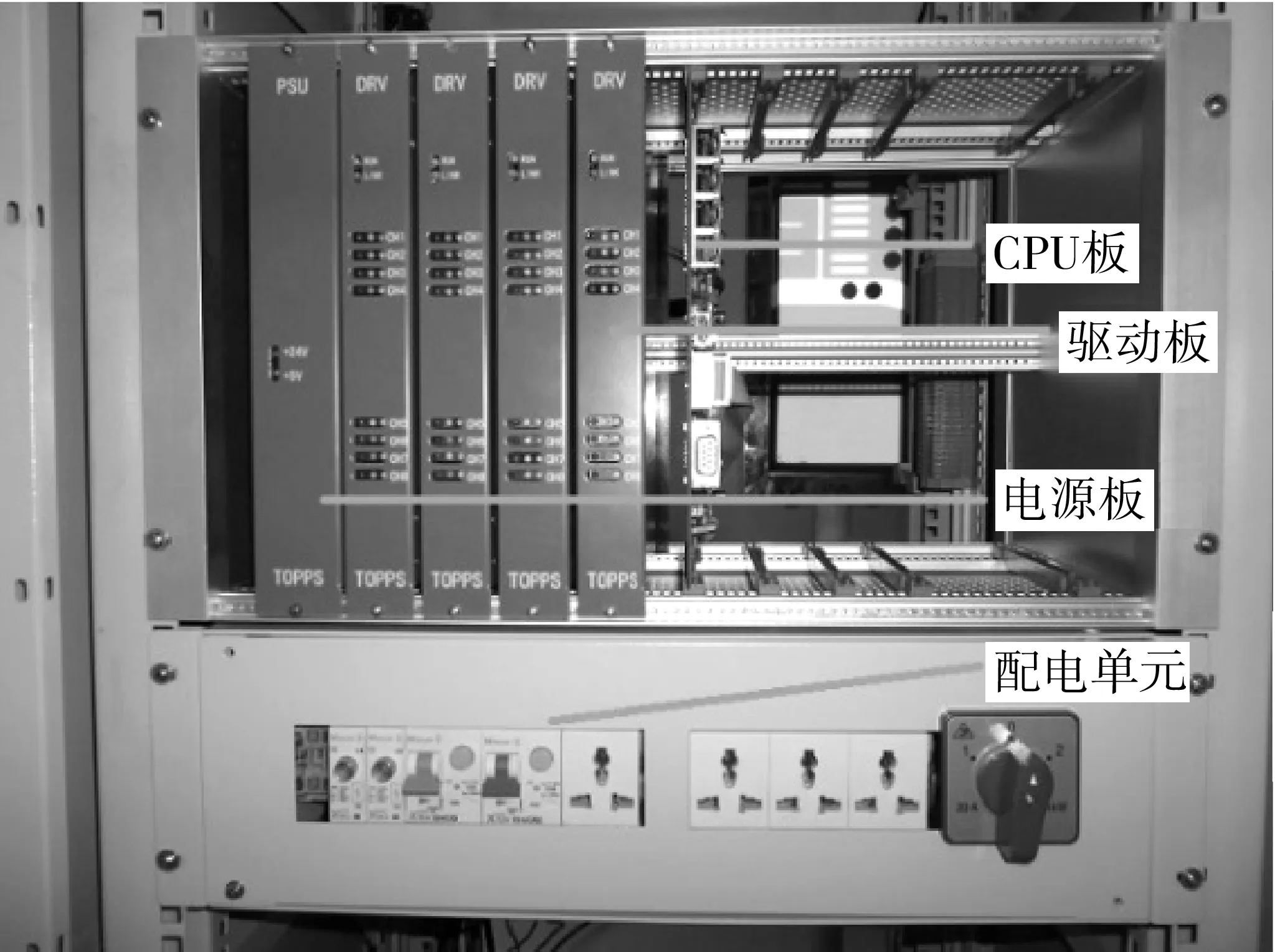
图10 TOPPS-TSC交通信号控制器Fig. 10 TOPPS-TSC traffic signal controller
客户端与服务器端建立连接后的信息传输主要包括两个过程:第一,平台中心系统发送控制指令数据到信号控制器,实现控制方案的下发,如图11;第二,信号控制器发送信号状态数据到交通仿真软件,实现实际信号控制器与仿真信号控制器的信号同步,如图12。
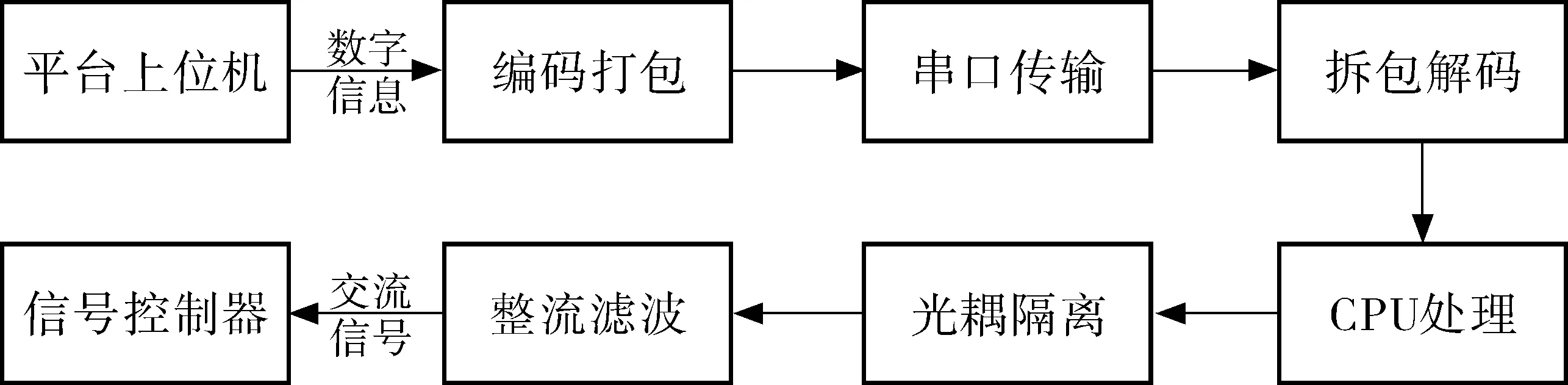
图11 平台中心系统(客户端)与信号控制器(服务器端)之间信息传输过程Fig. 11 Process of information transmission between platform centersystem (client) and signal controller (server)
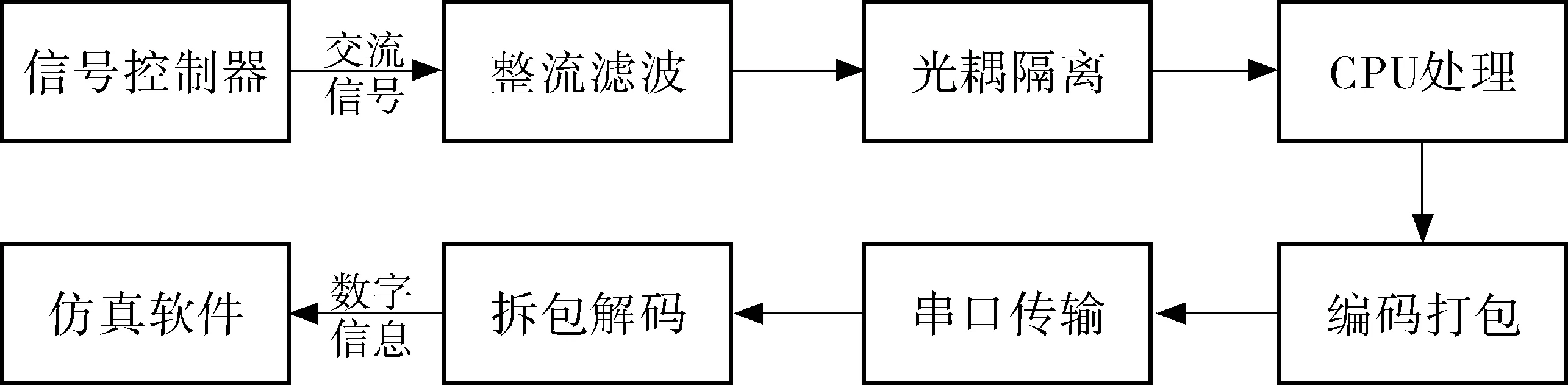
图12 信号控制器(客户端)与仿真软件(服务器端)之间信息传输过程Fig. 12 Process of information transmission between signalcontroller (client) and simulation software (server)
根据上述信息传输基本过程,利用TCP/IP协议建立客户端(平台中心系统)与服务器端(TOPPS-TSC信号机)之间的连接,设计了基于TCP/IP的通信握手过程[14],如图13。
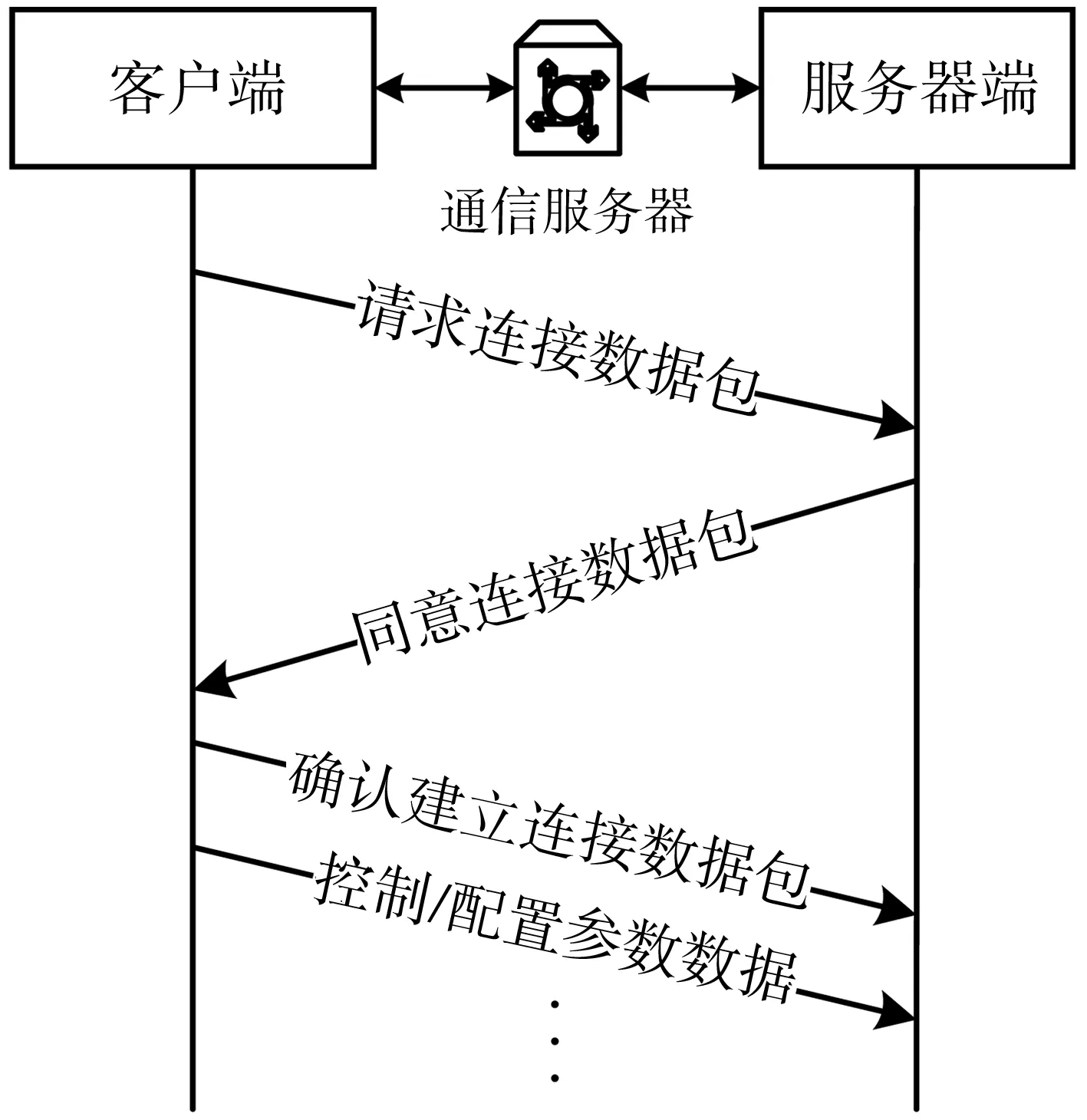
图13 基于TCP/IP的通信握手过程Fig. 13 Handshaking process based on TCP/IP
当客户端与信号机建立连接以后,客户端以1 000 ms/次的速度向信号机发送控制参数指令:F0 88 00 B5 00 B7 00 8C 00 F5 00 BE 00 BA 00 F8 00,同时避免信号机连接后30 s内接收不到指令而自动断开连接的情况的发生。当信号机接收到指令后,将返回按照接收的客户端控制指令执行的控制方案。根据控制参数指令得到返回的43个字节数据并以十六进制的形式显示在控件中,如图14。
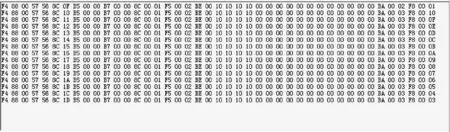
图14 控制参数指令数据Fig. 14 Control parameter instruction data
按照控制机与平台中心系统间的数据通信协议对信号机返回的数据信息进行解析,如信号机返回的数据信息为F4 88 00 57 45 D1 E8 B5 00 00 B7 00 00 8C 00 01 F5 00 02 BE 00 10 10 10 10 00 00 00 00 00 00 00 00 00 00 00 00 BA 00 03 F8 00 01,则解析结果如表1。
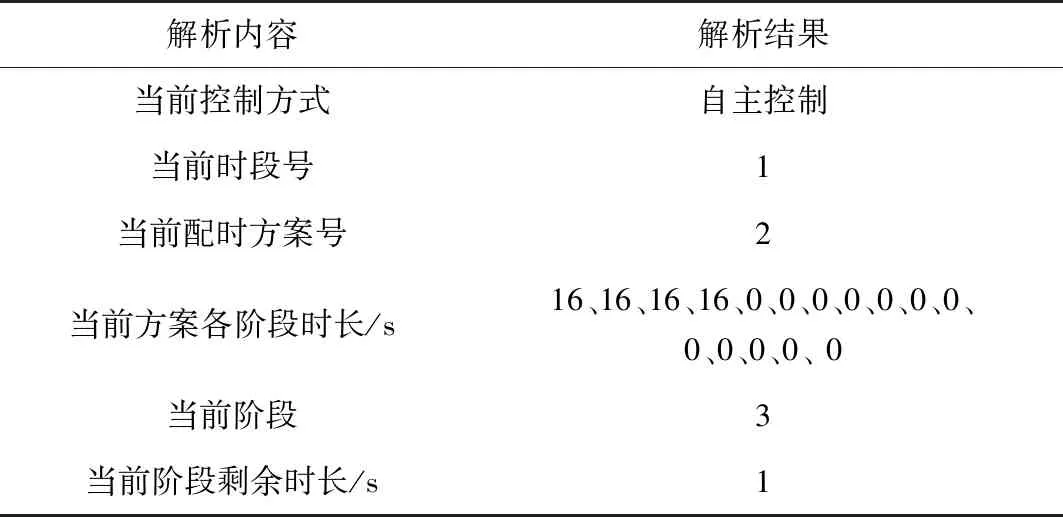
表1 数据通信解析结果 Table 1 Data communication resolution results
3 路网实例分析
3.1 路网搭建
为了验证城市路网交通控制平台的可靠性以及控制效果的有效性,选取北京望京地区作为研究实例,根据实地调查确定区域内各交叉口渠化设置、交通组织方式、信号配时方案以及交通流量数据等。在此基础上,应用交通仿真软件VISSIM建立望京地区路网仿真模型,该路网主要包含23个信号控制交叉口,面积约13 km2。经实地调查、数据整理、路网搭建、配时输入、流量设置、检测器配置、参数标定等一系列基础工作后,最后形成望京地区路网仿真模型,如图15。
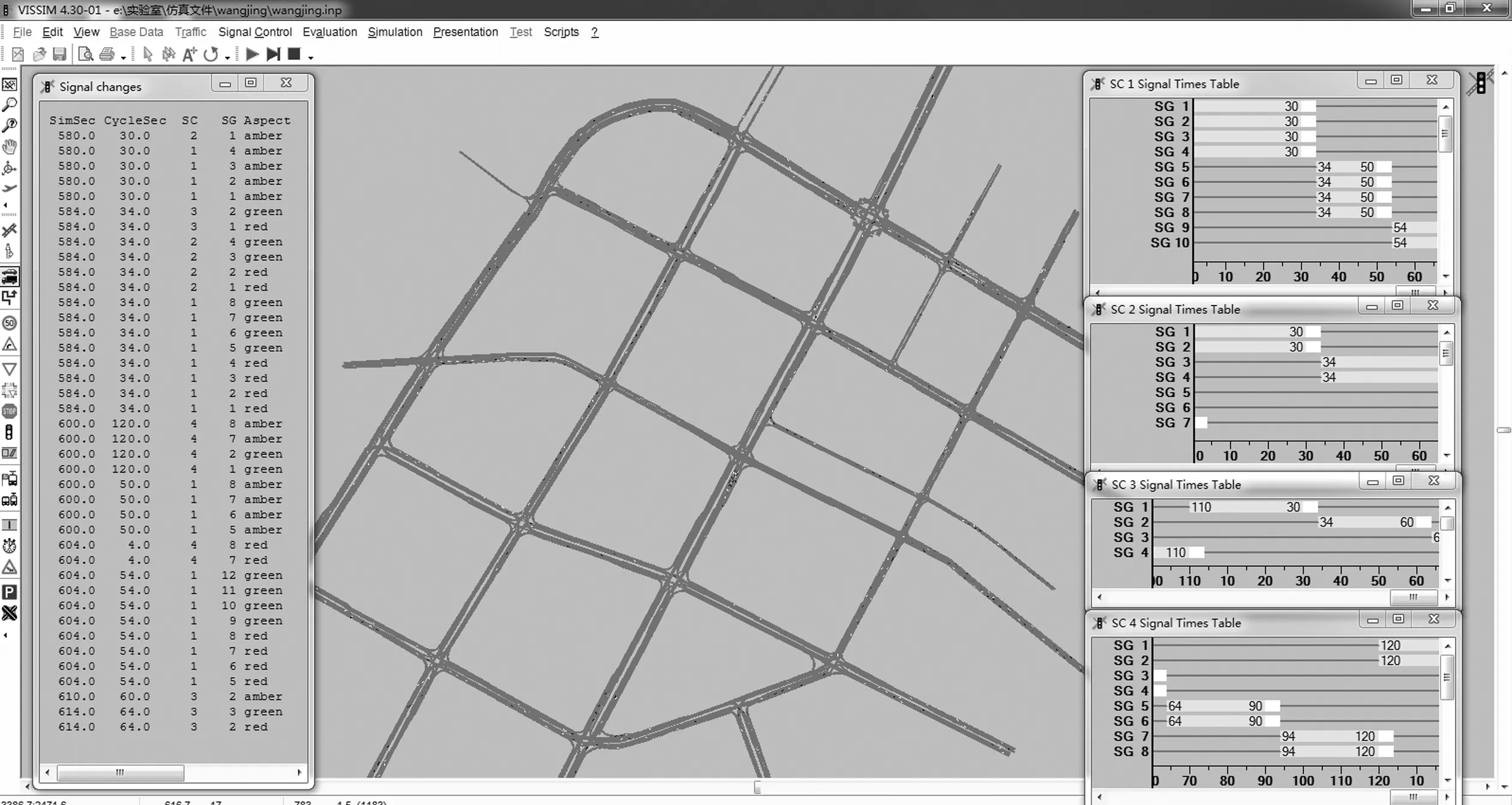
图15 北京望京仿真路网模型Fig. 15 Road netork model simulation of Wangjing in Beijing
为验证仿真路网的准确性[15],经参数标定后,建立与实际路网(工作日)的指标对比,见表2。由表2可以看出:仿真路网能够较为准确反映实际路网交通状态。
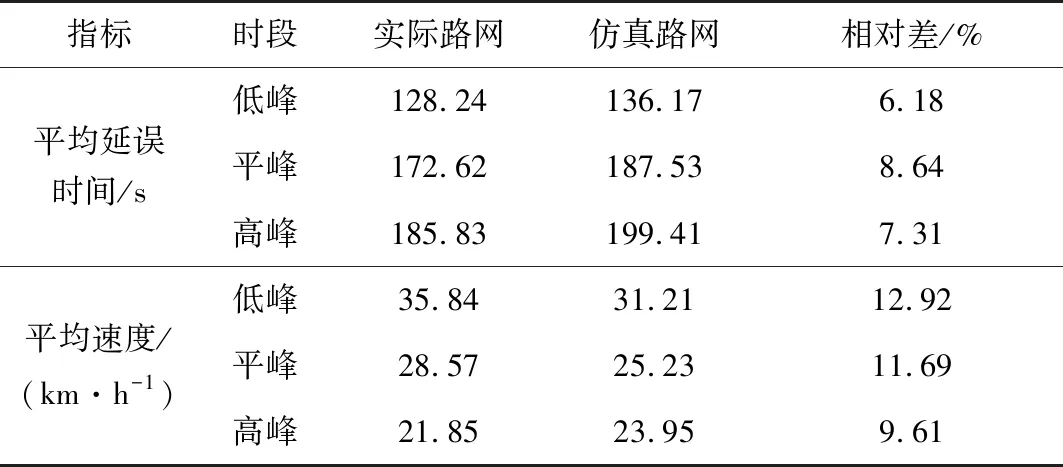
表2 指标对比 Table 2 Comparison of indices
3.2 分析评价
分别选用低峰(6:00—7:00)、平峰(11:00—12:00)和晚高峰(18:00—19:00)车流量数据,每种交通状态分别采用工作日(周一)和周末(周六)两种车流量数据,针对不同的交通流量,分别选用固定信号配时、干道协调控制、区域协同控制等3种不同的信号控制方式进行在环仿真。选取车辆平均延误时间Tdla和平均行驶速度Vavg作为评价指标,对3种控制方式下的仿真控制效果进行分析和评价。
每种情况分别用不同的随机种子仿真10次,每次仿真时间为4 500 s,其中,仿真开始的900 s为预热时间,此段时间的所有指标数据不计入统计数据,统计的评价指标数据均为10次仿真结果的算术平均值。图16、图17为车辆平均延误时间、平均速度在低峰、平峰以及高峰等不同交通状态下3种控制方式效果的对比分析。
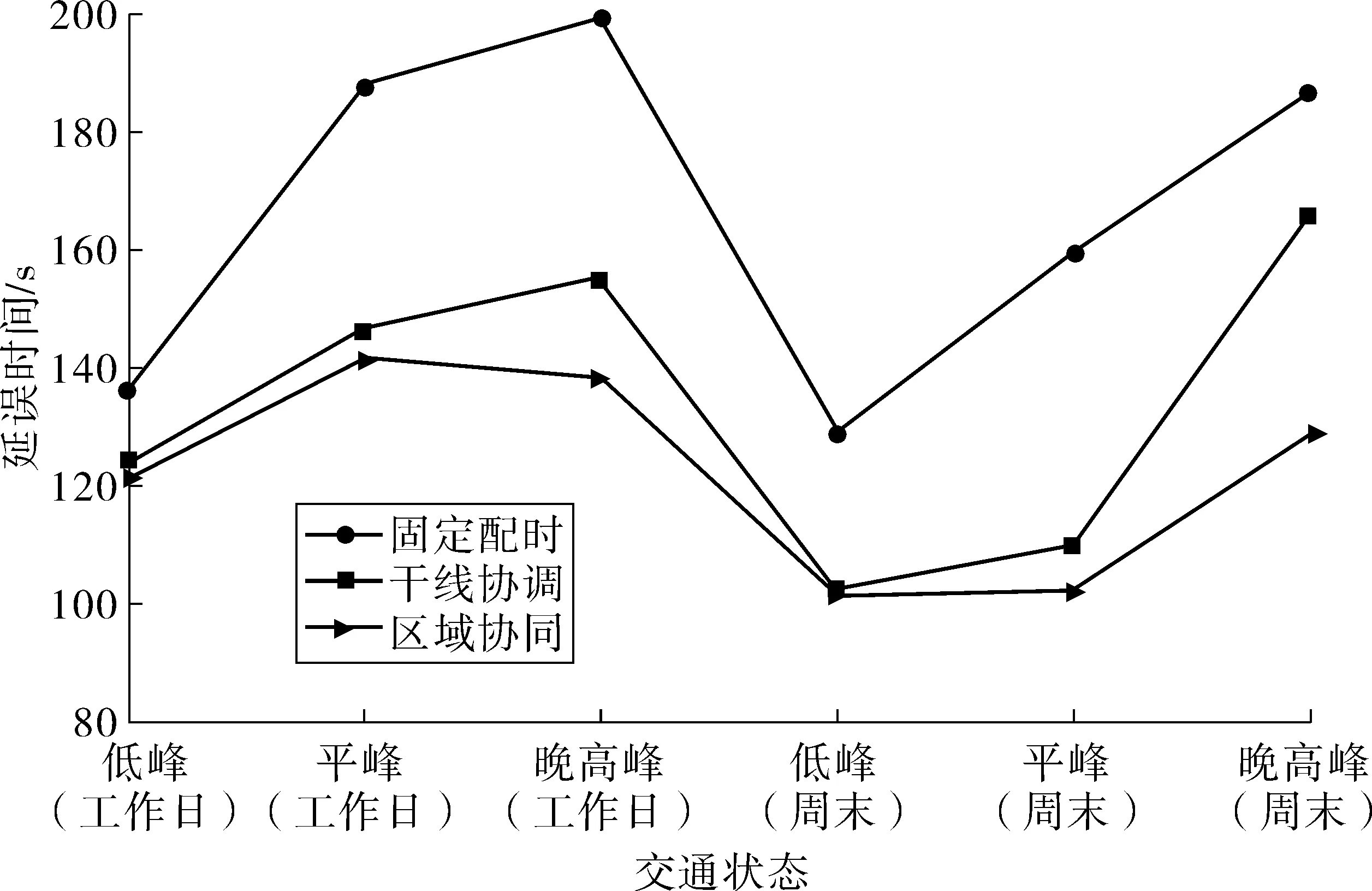
图16 工作日和周末不同交通状态下3种控制方式的延误时间对比Fig. 16 Comparison of the delay time of three control methods in different traffic conditions on weekdays and weekends
图16为工作日和周末不同交通状态下3种控制方式的延误时间对比。由图16可以发现:固定配时下的车辆平均延误时间不论在工作日还是周末的不同交通状态中数值是最大的,区域协同控制的延误时间数值是最小的,干线协调控制介于上两者之间。其中,工作日和周末低峰情况下的干线协调以及区域协同控制延误差别不大,当交通状态变为高峰时,区域协同控制延误改善效果明显好于干线协调,反映了干线协调在大交通流量下的能力局限性,相反,通过路网协同控制,降低了车辆平均延误时间,有助于缓解了交通拥堵现象。
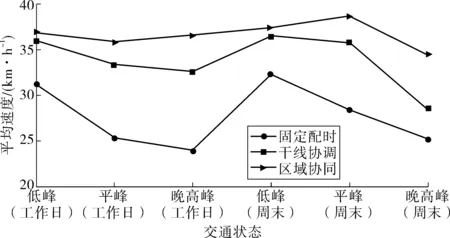
图17 工作日和周末不同交通状态下3种控制方式的平均速度对比Fig. 17 Comparison of the average velocity of three control methods in different traffic conditions on weekdays and weekends
图17为工作日和周末不同交通状态下3种控制方式的平均速度对比。由图17可以发现:区域协同控制的车辆平均速度最大,固定配时控制车辆平均速度最小,干线协调控制的车辆平均速度介于上两者之间。其中,区域协同的平均速度折线从工作日低峰一直到周末晚高峰都保持在较为平稳的状态,固定配时的速度波动变化最大,其晚高峰平均速度下降明显,而通过区域协同控制的路网平均速度得到明显的提升,说明通过区域主动分布式协同控制,使路网交通保持了较高的通行能力。
4 结 语
笔者提出了一种基于硬件在环仿真的城市路网交通控制平台,给出了平台的逻辑框架以及架构设计,并通过对平台中心系统、控制器接口的开发和平台通讯测试实现了平台中心系统的控制功能。通过路网实例在环仿真分析,结果表明平台能够实现包含单点控制、干线协调以及区域协同的控制功能,并对控制效果进行了准确评价,实现了路网交通控制的硬件在环仿真和控制效果评价的目标。平台将仿真软件与实际控制系统连接起来,搭建了数据互通的虚实互动场景,形成接近真实应用的操作环境,有利于准确评估系统控制效果。此外,平台不仅可以接入单一控制系统,还可接入多类控制系统,对于当前较多城市存在多种信号控制系统并存的现象,有助于从城市全路网层面统一集中管理和优化交通信号,从而提升全路网交通运行效率。
猜你喜欢
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2020年8期)2020-01-05
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
环球飞行(2018年7期)2018-06-27
中国公路(2017年11期)2017-07-31
中国公路(2017年7期)2017-07-24
中国公路(2017年10期)2017-07-21
发明与创新(2016年34期)2016-08-22