做平面运动滚子从动件盘形凸轮机构的泛类尺寸综合问题
2019-04-09 09:24:58林梦杰李延平
中国机械工程 2019年6期
林梦杰 李延平 常 勇
集美大学机械与能源工程学院,厦门,361021
0 引言
针对做平面运动滚子从动件盘形凸轮机构,常勇等[1-8]归纳和概括得到广义Ⅰ类尺寸综合问题和广义Ⅱ类尺寸综合问题。广义Ⅰ类尺寸综合问题,即已知从动构件系统尺寸、输出件推程始终位置和位移规律、许用压力角、位于连杆平面Σ2的滚子中心位置等,求解凸轮轴心的解区域、最紧凑的机构尺寸解等。广义Ⅱ类尺寸综合问题,即已知从动构件系统尺寸、输出件推程始终位置和位移规律、许用压力角,位于机架平面Σ0的凸轮轴心位置等,求解滚子中心的解区域、最紧凑的机构尺寸解等。上述两类尺寸综合问题有明显的前提,前者是已知滚子中心,求解凸轮轴心;后者是已知凸轮轴心,求解滚子中心。
本文研究的问题是,已知从动件系统尺寸、输出件推程始终位置、位移规律和许用压力角等条件,求解滚子中心、凸轮轴心解区域、最紧凑的机构尺寸解等的尺寸综合问题,即泛类尺寸综合问题。
1 问题的准确描述
如图1所示,德国海德堡高速印刷机机构的泛类尺寸综合问题的描述如下:已知机架长度l0、摇杆长度l5、初位角θ50、行程角βm、推程运动角Ф0和运动规律、推程许用压力角[α]、凸轮转动方向滚子中心C,凸轮轴心O1分别位于连杆平面Σ2、机架平面Σ0上,求解滚子中心C、凸轮轴心O1的解区域、最紧凑机构尺寸解等。

图1 高速印刷机机构的构型Fig.1 Mechanism-form of high-velocity printing machine
2 理论基础和若干重要结论
2.1 固定坐标系Oxy和浮动坐标系O2uv
图1所示的演化构型中,凸轮轴心、滚子中心位于机架、连杆平面,反映泛类尺寸综合的特征。固定坐标系Oxy指固连于机架平面Σ0上,以O为原点、O→x为x轴正向、O→y为y轴正向的坐标系。浮动坐标系O2uv指固连于连杆平面Σ2上,以O2为原点、O2→u为u轴正向、O2→v为v轴正向的坐标系。
2.2 广义Ⅰ类尺寸综合问题解法[3]
据文献[3],在连杆平面Σ2上任取一点作为滚子中心C(u,v),根据类速度图原理和推程压力角α≤[α],任一瞬时均存在瞬时区域套Γ(x,y)/瞬时边界∂Γ(x,y)。根据相应解析公式[3],绘制整程∠P20Hx-θ1线图。

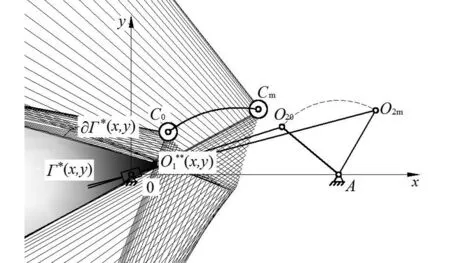
图2 Γ*(x,y)/∂Γ*(x,y)存在(开放性态)Fig.2 Γ*(x,y)/∂Γ*(x,y) exists(oponed)
2.3 最优凸轮轴心和凸轮最小基圆半径的求解


图3 Γ*(x,y)/∂Γ*(x,y)存在(封闭性态)Fig.3 Γ*(x,y)/∂Γ*(x,y) exists(sealed)
3 Γ*(x,y)/ ∂Γ*(x,y) 的性态多样性
在连杆平面Σ2上,探索、遍历性选取一系列点作为滚子中心C(u,v),采用文献[3]方法及解析公式编制通用程序,生成对应的Γ*(x,y)/∂Γ*(x,y)。
滚子中心C(u,v)不同时,Γ*(x,y)/∂Γ*(x,y)存在性态多样性:

(2)Γ*(x,y)/∂Γ*(x,y)不存在时,如图4所示,Γ*(x,y)是空集,Γ*(x,y)/∂Γ*(x,y)不存在。

图4 Γ*(x,y)/∂Γ*(x,y)”不存在Fig.4 Γ*(x,y)/∂Γ*(x,y) not exists
文献[3]因在连杆平面Σ2上取点有限,仅仅发现了Γ*(x,y)/∂Γ*(x,y)存在的情形。新的研究发现:①Γ*(x,y)/∂Γ*(x,y)可能存在②Γ*(x,y)/∂Γ*(x,y)存在时,有开放性态、封闭性态。
4 C、O1解区域的遍历搜索求解方法
4.1 选定简约遍历区域Σ [2]和Σ[0]
连杆平面Σ2、机架平面Σ0无限延展,若据此搜索求解,计算工作量大、不经济、效率低,因此,应尽量压缩简约遍历区域Σ[2]和Σ[0]的选择范围。同时,应能保证反映、呈现重要的现象、规律和特征。
通过预估和评判,在连杆平面Σ2、机架平面Σ0上,选定图5所示的简约遍历区域Σ[2]:
(1)
和Σ[0]:
(2)

图5 Σ[2]和Σ[0]及其离散——网格化Fig.5 Σ[0] and Σ[0] and its discrete grid
Σ[2]、Σ[0]的选定需要兼顾求解的可靠性和经济性。可靠性指问题目标解必居其中;经济性指求解工作量显著减小。
4.2 Σ[2]和Σ[0]的离散——网格化
如图5a所示,对Σ[2]和Σ[0]分别沿u、v和x、y方向离散——网格化:
Δ=up+1-up=vq+1-vq=xj+1-xj=
yk+1-yk=10-m(mm)
(3)
其中,m为离散指数,取自然数,根据求解精度要求而定。
对于任一网格节点C(up,vq)和O1(xj,yk),有
(4)
p=pmin,pmin+1,…,pmax
pmin=int(-0.7l0/Δ)pmax=int(0.7l0/Δ)
q=qmin,qmin+1,…,qmax
qmin=int(-0.4l0/Δ)qmax=int(l0/Δ)
和
(5)
j=jmin,jmin+1,…,jmax
jmin=int(-0.4l0/Δ)jmax=int(l0/Δ)
k=kmin,kmin+1,…,kmax
kmin=int(-0.7l0/Δ)kmax=int(0.7l0/Δ)
4.3 滚子中心C的解区域和非解区域

图6 滚子中心C的解区域和非解区域 Fig.6 Union solution domain and non-union solution domain of roller center C
4.4 滚子中心C的并解区域和并非解区域
(6)


图7 滚子中心C的并解区域和并非解区域 Fig.7 The roller center C’s union solution region and not union solution region
4.5 凸轮轴心O1的并解区域和并非解区域

5 最紧凑机构尺寸解的存在性与求解方法
如图9所示,根据2~4节,得最紧凑尺寸解的具体求解思路和步骤:

图8 凸轮轴心O1的并解区域和并非解区域 Fig.8 Union solution domain and non-union solution domain of cam axis O1


图9 空间曲面S* *、谷脊线J* *和谷底点P* *Fig.9 Space surface S* *,ridge line J* * and bottom point P* *
6 机构综合示例
求解步骤如下:
(2)如图9所示,据已知条件、步骤(1)和第5节步骤(1)~步骤(4),解得空间曲面S* *。

猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21 05:43:10
哈尔滨轴承(2021年4期)2021-03-08 01:00:52
家庭影院技术(2019年12期)2020-01-19 02:07:20
轴承(2018年10期)2018-07-25 07:22:22
工业设计(2016年4期)2016-05-04 04:00:27
中国机械工程(2015年13期)2015-12-16 12:25:36
华东理工大学学报(自然科学版)(2015年1期)2015-11-07 09:15:46
河南科技(2014年16期)2014-02-27 14:13:21
汽车与新动力(2014年2期)2014-02-27 12:10:19
上海金属(2013年6期)2013-12-20 07:58:02