
基于多变量多尺度模糊熵的行星齿轮箱故障诊断
2019-04-03 01:17:46郑近德潘海洋刘庆运
振动与冲击 2019年6期
郑近德, 潘海洋, 张 俊, 刘 涛, 刘庆运
(1. 安徽工业大学 机械工程学院,安徽 马鞍山 243032;2.福州大学 机械工程及自动化学院,福州 350116)
行星齿轮箱具有传动比大、承载能力强、传动效率高等优点,已被广泛应用于风力发电、直升机、工程和化工机械等大型复杂机械装备中。低速重载的工作环境常导致其太阳轮、行星轮、行星架等关键部件出现磨损或疲劳裂纹等故障。现有许多行星齿轮箱故障诊断方法往往只采用垂直箱体方向振动信号进行诊断而忽略了其他方向振动信息。由于行星齿轮箱振动传输路径复杂,传感器采集的行星齿轮箱各个方向的振动信号往往都包含了重要信息。尽管通常单一方向或路径的振动信号能够有效的诊断故障,但由于故障响应比较微弱,综合多通道振动信号信息则能够得到更准确的故障诊断效果。随着多传感测量技术的发展,对由一个或多个传感器同步观测的多通道数据序列内及序列间的动态相互关系的评估日益成为一种有效的数据分析方法,越来越受到研究者的重视[1]。
当行星齿轮箱发生故障时,振动信号往往表现出非线性和非平稳特征。许多非线性动力学的方法如近似熵[2]、样本熵(Sample Entropy,SampEn)[3]和多尺度熵(Multi-Scale Entropy,MSE)等,由于能够提取隐藏在振动信号中的非线性故障特征信息,已经被广泛应用于机械故障诊断领域。文献[4-6]将多尺度熵分别应用于滚动轴承和转子系统的故障诊断;文献[7]将多尺度模糊熵(Multi-Scale Fuzzy Entropy,MFE),应用于滚动轴承故障诊断,MFE有效地抑制了MSE由于时间序列变短而导致熵值突变的问题,稳定性和一致性更好。
但是,MSE和MFE都是单变量分析方法,Ahmed等[8-9]在传统单变量复杂度测量的基础上,结合多维嵌入重构理论,提出了多变量样本熵(Multivariate Sample Entropy,MvSampEn),并将其扩展到多尺度,提出了多变量多尺度熵(Multivariate Multi-scale Entropy,MMSE)。MMSE不仅能够测量多通道数据序列中每一个序列自身的复杂性(序列内模式的自相似性),同时还考虑了多个通道序列之间的互预测性。MMSE从复杂性、互预测性和长时相关性角度评价了多通道时间序列的动态相互关系,展现了多通道时间序列内在的非线性耦合特征,在生物血压数据分析[10]和呼吸序列分析[11-12]等多个领域得到了应用。在MMSE的基础上,论文采用模糊熵代替样本熵,同时结合多变量粗粒化的多尺度方式,提出了多变量多尺度模糊熵(Multivariate Multiscale Fuzzy Entropy,MMFE),用来衡量多通道时间序列的复杂性和互预测性。
最后,将提出的MMFE方法应用到行星齿轮箱故障诊断中,同时结合粒子群优化支持向量机(Particle Swarm Optimization Support Vector Machine, PSOSVM)[13-14]构建多故障分类器,提出了一种基于MMFE和PSOSVM的行星齿轮箱故障诊断方法。通过试验数据分析,将提出的方法与基于单变量多尺度熵,多尺度模糊熵以及多变量多尺度熵的故障诊断方法进行了对比分析,结果表明,与上述方法相比,论文提出的方法故障识别率更高。
1 多变量多尺度模糊熵
1.1 多变量模糊熵
为了计算多变量样本熵或多变量模糊熵,需要依据Takens嵌入定理产生多变量嵌入向量。

Xm(i)=[u1,i, ...,u1,i+(m1-1)λ1,u2,i, ...,
u2,i+(m2-1)λ2, ...,up,i+(mp-1)λp]
(1)
(2)定义Xm(i)与Xm(j)之间的距离为

(2)
(3)
(4)定义函数
(4)
再将嵌入维数m扩展到m+1,由于包含有p个序列,通过分别扩展mk+1(k=1,2, ...,p)可获得p×(N-n)个重构向量Xm+1(i)。对于m+1,在一个固定的阈值内,延迟向量对的平均数目可由两种方式得到。一种是对于m+1维空间的第k个子空间,可以在一个固定的阈值内计算延迟向量对的平均数目,然后再对所有的p个子空间求平均。第二种方法是考虑所有子空间的延迟向量,然后在p个子空间内部直接对比延迟向量,得到
(5)
(5)定义多变量模糊熵为
(6)
当有限时,式(6)近似表示为
MvFE(m,n,r,N)=lnφm(n1,r)-lnφm+1(n1,r)
(7)
1.2 多变量多尺度模糊熵
多变量多尺度模糊熵的步骤如下:

(8)
式中:τ=1,2,…为尺度因子。

多变量多尺度模糊熵是对归一化多通道时间序列复杂性的量度,其几何解释如下:①如果在大部分尺度上,多变量时间序列X的多变量模糊熵值比Y大,那么就认为X的动力学行为比Y更复杂;②如果多变量时间序列X的多变量多尺度模糊熵随着尺度因子的增加而单调递减,这意味着X仅在最小的尺度上包含较多的有用信息,典型例子如随机白噪声或可预测的信号。MMFE不仅考虑了多通道数据序列中每一个时间序列内模式的自相似性,同时还考虑了多个通道序列之间的互预测性。因此,MMFE从复杂性、互预测性和长时相关性角度评价了多通道时间序列的动态相互关系。
1.3 参数选择与对比分析
在多变量多尺度模糊熵的计算中,影响计算结果的参数主要有:①多维时间延迟λ=[λ1,λ2, ...,λp]和总维数M=[m1,m2, ...,mp],k=1,2, ...,p;②时间序列的长度N;③控制模糊隶属函数梯度和宽度的n1和r。首先,基于单变量的嵌入定理及多变量多尺度熵的相关分析,mk=2,τk=1(k=1,2, ...,p)时对MMFE的计算结果影响较小。其次,时间序列长度对MMFE的计算有一定的影响。不失一般性,考虑长度为Ni=1 000·i(i=1,2, ...,6)的三通道白噪声信号,在相同的其他参数条件下计算得它们的MMFE,结果如图1所示。由图1中可以看出,当时间序列长度大于2 000时,不同长度的白噪声信号的MMFE相差较小,因此,一般选择N≥2 000。

图1 不同长度三通道白噪声的MMFE对比Fig.1 MMFEs of three channel white noises with different lengths
在单变量信号分析方法中,白噪声序列的MSE熵值随着尺度因子增大而单调递减,而1/f噪声的MSE熵值在较大尺度因子逐渐趋于稳定[15],这与1/f噪声比白噪声结构更复杂的事实一致。对于多通道数据而言,含有1/f噪声序列的通道越多,其多变量复杂度应该越大,MMFE和MMSE的仿真结果也应与该结论一致。为此,采用三通道数据进行验证,仍以白噪声和1/f噪声为例。根据三通道数据中含有白噪声和1/f噪声组合情况分为4组,即:(a)三通道1/f噪声;(b)两通道1/f噪声,一通道白噪声;(c)一通道1/f噪声,两通道白噪声;(d)三通道白噪声。每种状态的仿真数据采用10组样本(长度为4 096点),画出它们的MMSE和MMFE的均值和标准差曲线。依据多尺度熵理论,理论上,在大部分尺度上它们的熵值关系应该有:(a)>(b)>(c)>(d)。分别采用MMSE和MMFE对上述信号进行分析,结果分别如图2(a)和图2(b)所示,其中MMFE中模糊熵的参数n1和r的选择,依据文献[16],设n1=2,r=0.15SD(SD为多通道数据标准差)。从图2可以看出,在大部分尺度上有:(a)>(b)>(c)>(d),与理论结果相符。这说明MMSE和MMFE能够有效的反映多通道数据序列的复杂度;其次,从对比还可以看出,随着尺度因子的增加,三通道1/f噪声的熵值与两通道1/f噪声、一通道白噪声的MMSE有一定的波动,且在较大的尺度上有重叠,因此,MMSE对四种组合的多通道噪声的区分效果明显不如MMFE。
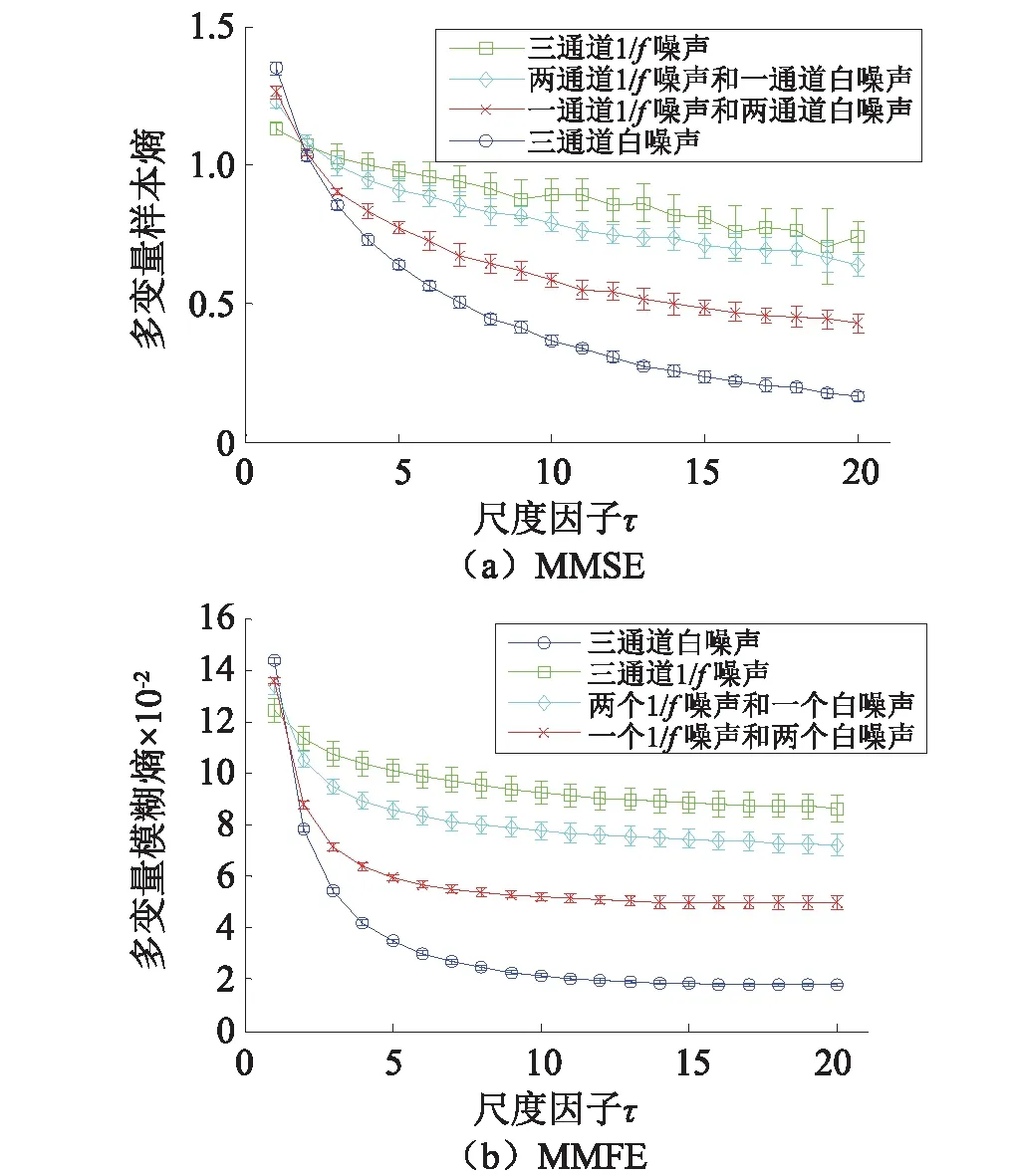
图2 多通道噪声数据的MMSE和MMFEFig.2 MMSEs and MMFEs of three channels noise signals
2 基于多变量多尺度模糊熵的行星齿轮箱故障诊断
太阳轮是行星齿轮箱的关键部件,当齿轮发生故障时,往往以振动的形式的向外传递,但传递路径较为复杂。为了尽可能多和更精确地利用振动信号信息实现齿轮箱的故障诊断,综合采用齿轮箱多个方向的振动信号信息不失为一种有效的途径。
基于上述分析MMFE的优势,同时采用适合小样本分类的支持向量机(Support Vector Machine,SVM)实现行星齿轮箱状态的智能分类。由于惩罚参数c和核函数g取值对SVM预测精度有一定的影响,需采用优化算法在一定区域内搜索参数最优组合,以获得具有较好分类性能的SVM。粒子群优化(Particle Swarm Optimization,PSO)是一种基于群体的智能寻优算法,其初始化一群随机粒子(随机解),然后通过迭代寻找最优解。在每次迭代中粒子通过跟踪个体极值和全局极值来更新,个体极值为粒子本身所找到的最优解,全局极值为整个种群目标的最优解。PSOSVM的参数的过程,如图3(a)所示。
基于此,提出了基于MMFE和PSOSVM的行星齿轮箱故障诊断方法,具体步骤如下:
步骤1 假设有K种不同故障状态的齿轮箱振动信号,每种状态有M个样本,随机选择其中的组数据作为训练样本,剩余M-M1组作为测试样本;
步骤2 分别计算所有样本的MMFE,将20个尺度的特征值作为故障特征向量;
步骤3 将所有训练样本的故障特征向量输入到基于PSOSVM建立的多故障分类器进行训练;
步骤4 将测试样本的故障特征向量输入到已训练的多故障分类器识别,实现齿轮箱的故障诊断。
论文提出的故障诊断方法流程,如图3(b)所示。

图3 粒子群优化支持向量机及论文提出的故障诊断方法流程图Fig.3 Flowcharts of PSOSVM and the proposed fault diagnosis method
为了验证所提行星齿轮箱故障诊断方法的有效性,将其应用于试验数据分析。试验采用动力传动故障模拟试验台(Dynamics Diagnosis System, DDS)模拟行星齿轮箱太阳轮故障,试验台主要结构如图4(a)所示。试验行星齿轮箱为一级四星减速箱,具体参数为:太阳轮齿数28,行星轮齿数36,齿圈齿数100,行星轮数4,模数1。其中故障齿轮为太阳轮故障,故障类型为:缺齿,裂纹(单齿根裂纹),磨损(齿面均匀磨损),如图4(b)~图4(d)所示。振动信号采集时,加速度计垂直安装在行星齿轮箱上方箱体上,实验采集了Y和Z轴(径向和垂直箱体)两个方向的振动加速度信号,采样频率为8 192 Hz。试验过程中电机转速为1 500 r/min,转频为25 Hz,负载为0.5 A。四种状态行星齿轮箱振动信号两个通道的时域波形,如图5所示。
为了对比,分别采用MSE,MFE,MMSE和MMFE对正常,断齿,磨损和裂纹四种状态齿轮的多通道振动信号进行分析,其中基于单一通道振动信号分析的MSE和MFE方法采用垂直箱体Z轴方向的振动信号,而基于多通道信号分析的MMSE和MMFE方法分析中采用两个通道的振动信号。四种状态齿轮(每组20个样本)的MSE,MFE,MMSE和MMFE均值与标准差曲线分别如图6(a)~图6(d)所示,四种方法参数选择如表1所示。

图4 动力传动故障模拟试验台及太阳轮故障类型Fig.4 Dynamics diagnosis system and fault types of sun gear

图5 四种状态的振动信号两个通道的时域波形Fig.5 Time domain waveforms of two channel vibration signals of four gear states
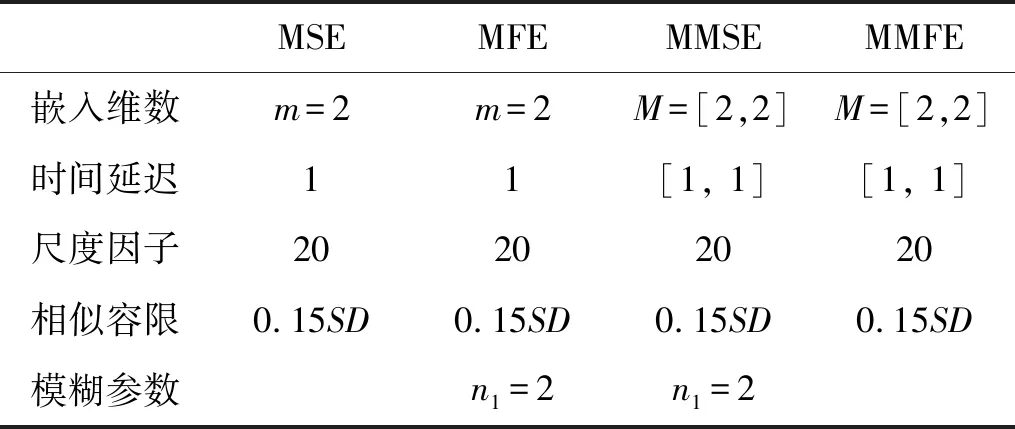
MSEMFEMMSEMMFE嵌入维数m=2m=2M=[2,2]M=[2,2]时间延迟11[1, 1][1, 1]尺度因子20202020相似容限0.15SD0.15SD0.15SD0.15SD模糊参数n1=2n1=2
由图6可以看出,上述四种状态齿轮振动信号的熵均值在大部分尺度上的大小关系为:裂纹,正常,磨损和缺齿。这是因为正常齿轮振动信号主要成分以啮合频率及其高次谐波为主,发生磨损故障时,齿轮振动信号主要成分仍以啮合频率及其高次谐波为主,但各成分在频谱的幅值明显增强,因此相较于正常齿轮振动,熵值降低;而当发生缺齿故障时,振动信号表现出明显的周期性冲击特征,信号的周期性和自相似性增强,复杂性程度降低,多变量模糊熵值也逐渐降低。此外,仔细观察图6容易发现,MSE和MMSE曲线中正常和裂纹故障,MFE曲线中正常、磨损和裂纹故障振动信号在相同尺度下的熵均值非常接近,标准差也有重叠,区分效果并不理想,而MMFE在部分尺度上(尺度因子3~7)无交叉重叠,能够将四种状态明显区分开。因此,与MSE,MFE和MMSE相比,MMFE的区分效果更好。
为了更准确地区分行星齿轮箱的四种状态,将基于MMFE和PSOSVM的齿轮箱故障诊断方法应用于上述试验数据分析,具体步骤如下:
步骤1上述四种齿轮状态,每种状态取50个样本,样本长度为2 048,共得到200个样本。每种状态的样本中随机选择20组数据作为训练样本,剩余30组作为测试样本;共得到80个训练样本和120个测试样本;

图6 四种状态行星齿轮箱振动信号的MSE,MFE,MMSE和MMFEFig.6 MSE, MFE, MMSE and MMFE of four kinds vibration signals of faulty gears
步骤2计算所有训练样本和测试样本的MMFE值,将20个尺度熵值作为故障特征向量;
步骤3将所有训练样本的故障特征向量输入到基于PSOSVM建立的四类故障分类器进行训练。其中,为了方便,标记“正常,缺齿,磨损和裂纹”故障的对应类别分别为1, 2, 3, 4;
步骤4将所有测试样本输入到已训练的多故障分类器进行识别。
测试样本输出结果如图7(a)所示,由图中可以看出,120测试样本中有一个磨损样本和一个裂纹样本被错分到正常,其他样本都得到了正确分类,故障识别率为98.33%,交叉验证别率为100%,PSO优化SVM的最优参数c和g分别为1.44和88.97。
为了对比,将上述步骤2中MMFE分别换成MSE,MFE和MMSE,重复上述同样过程,测试样本输出结果分别如图7(b)~图7(d)所示,其中图7(c)和图7(d)为MSE和MFE采用垂直箱体(Z轴)方向振动信号分析结果。表2更详细地给出了分别采用MSE和MFE分析径向和垂直箱体方向(Y和Z轴方向)的振动信号进行诊断的故障识别率。从图7和表2可以看出,在基于MSE的PSOSVM分类器输出中,分别采用单一径向和垂直箱体方向振动信号进行分析,分别有8个和9个样本被错分,故障识别率分别为92.5%和93.3%;在基于MFE的PSOSVM方法中,也分别采用单一径向和垂直箱体方向振动信号进行分析,两个方向的振动信号分解结果中都有5个测试样本被错分,故障识别率为95.86%;而在基于MMSE与PSOSVM方法中,有9个测试样本被错分,故障识别率为92.5%;因此,基于单一通道的MSE和MFE方法及基于两通道的MMSE方法的故障识别率都小于论文方法的识别率。表2更详尽地给出了上述四种方法的错分样本信息、识别率、交叉验证识别率和PSOSVM最优参数c和g。上述分析结果和表2更进一步说明了模糊熵相较于样本熵、多通道相较于单通道信号分析的优越性。

图7 基于不同方法的PSOSVM测试样本输出结果Fig.7 Outputs of testing samples based on the different fault diagnosis methods
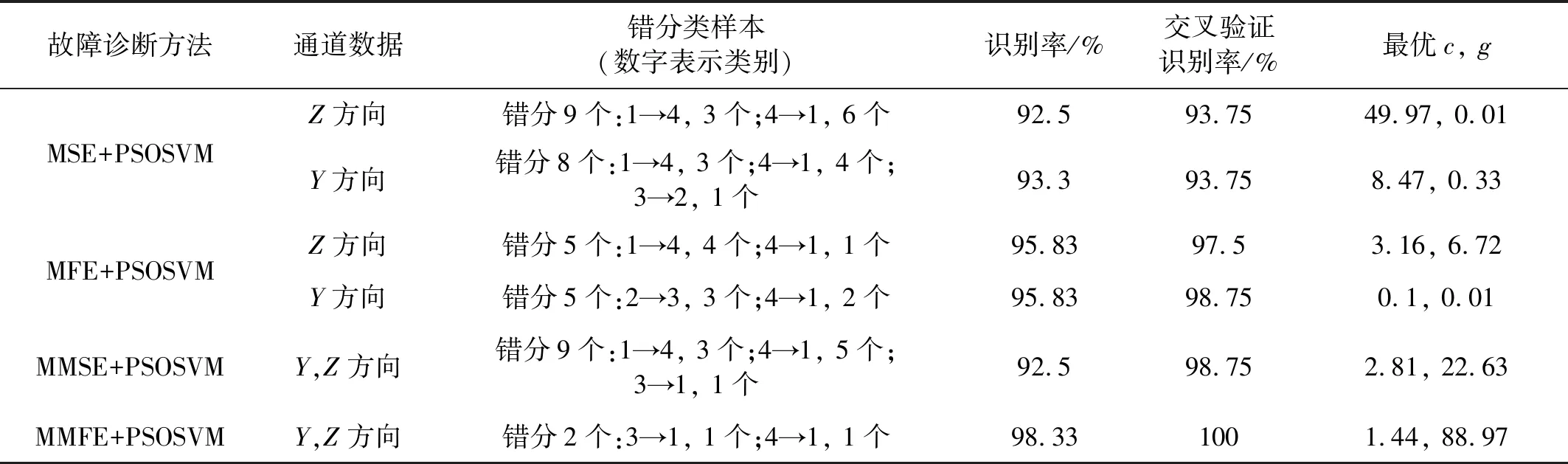
故障诊断方法通道数据错分类样本(数字表示类别)识别率/%交叉验证识别率/%最优c, gMSE+PSOSVMZ方向错分9个:1→4, 3个;4→1, 6个92.593.7549.97, 0.01Y方向错分8个:1→4, 3个;4→1, 4个;3→2, 1个93.393.758.47, 0.33MFE+PSOSVMZ方向错分5个:1→4, 4个;4→1, 1个95.8397.53.16, 6.72Y方向错分5个:2→3, 3个;4→1, 2个95.8398.750.1, 0.01MMSE+PSOSVMY,Z方向错分9个:1→4, 3个;4→1, 5个;3→1, 1个92.598.752.81, 22.63MMFE+PSOSVMY,Z方向错分2个:3→1, 1个;4→1, 1个98.331001.44, 88.97
3 结 论
(1)提出了多变量多尺度模糊熵方法来衡量多变量时间序列的复杂性、互预测性和长程相关性。通过仿真信号分析,将其与多尺度熵,多尺度模糊熵和多变量多尺度熵进行了对比,结果表明了多变量多尺度模糊熵的优越性。
(2)将MMFE应用于行星齿轮箱故障诊断,提出了一种基于MMFE和PSOSVM的行星齿轮箱故障诊断方法。通过分析行星齿轮箱的试验数据,将其与基于单变量的多尺度熵、多尺度模糊熵和多变量多尺度熵的故障诊断方法进行了对比,结果表明论文提出的方法识别率更高。
当然MMFE方法也有不足之处,部分参数的选择需要人为设置,笔者正在对这些问题进行研究和完善。
猜你喜欢
山东冶金(2022年3期)2022-07-19 03:24:36
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
读者(2018年20期)2018-09-27 02:44:48
制造技术与机床(2017年4期)2017-06-22 11:17:44
太空探索(2016年5期)2016-07-12 15:17:55
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
风能(2016年12期)2016-02-25 08:45:56
时代英语·高三(2014年5期)2014-08-26 17:01:17
