基于低轨卫星增强的非差高精度导航定位技术与在轨试验验证
2019-04-03 05:53:46梁尔涛施伟璜邓成晨郑永艾
上海航天 2019年1期
梁尔涛,张 伟,施伟璜,邓成晨,彭 攀,郑永艾
(上海卫星工程研究所,上海 201109)
0 引言
受各种误差影响,全球导航系统(GPS)在无增强信息下的单点定位精度约为10 m,精度不高造成其应用在许多领域受到限制。随着智能驾驶、无人机配送、高精度测绘、精密农业等领域对定位精度需求的提高,为实现分米级,甚至厘米级定位精度,国内外对导航定位精度改善方法的研究愈加深入。利用基准站的差分技术是目前最成功的方法之一。基于差分技术的连续运行参考站系统(CORS)的用户定位精度优于5 cm,但因其定位误差会随用户与基准站间距离的增大而增大,故其应用范围受到很大限制。此外,差分技术依赖于基准站,无法服务于海洋等区域。在全球导航卫星系统服务组织(IGS)提供GPS卫星的精密星历、精密钟差后,不依赖基准站的非差精密单点定位技术的定位精度得到显著提高,成为高精度定位技术的发展方向[1-5]。
与传统广域增强系统(WAAS)利用高轨卫星转发改正信息进行增强相比,低轨导航增强系统不仅进行增强信息的转发,还发送一路类伪码信号进行信号增强,即不仅能实现定位精度的增强,还能实现导航完好性和可用性的增强,也就是信息信号的一体化增强。地面导航用户接收增强信号后,利用基于自适应卡尔曼滤波的精密单点定位实现广域快速非差高精度定位。本文在技术研究基础上研制了低轨导航增强试验载荷和地面导航试验终端。低轨导航增强试验星于2017年11月15日在太原卫星发射中心发射成功。经在轨测试,地面导航试验终端在星基增强下实现了定位精度从10 m到30 cm的飞跃,满足智能驾驶、精密农业等应用领域对导航定位精度的需求。
1 低轨星基导航增强技术
低轨导航增强技术依托低轨星基导航增强系统实现。低轨星基导航增强系统由空间段、地面段和用户段3部分组成,如图1所示。
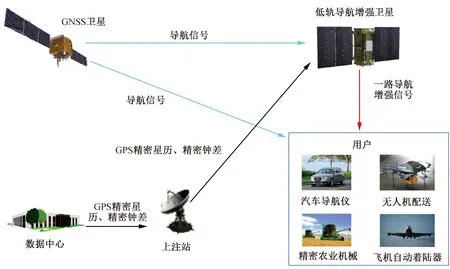
图1 低轨星基导航增强系统Fig.1 LEO satellite-based navigation augmentation system
空间段主要为低轨导航增强卫星。空间段可接收地面上注的GPS精密星历和GPS精密钟差,直接接收GPS导航信号,实现实时高精度定轨与时间同步,打包导航增强电文,完成下行广播。
地面段包括数据处理中心和上注站。数据处理中心通过IGS网站实时获取GPS精密星历和GPS精密钟差,完成上注数据包加工;上注站通过上行通道将数据处理中心数据包上注至低轨卫星。
用户段接收低轨卫星广播的导航增强信号,完成电文解析,通过基于自适应卡尔曼滤波的精密单点定位软件完成高精度定位。
2 低轨导航增强信号体制
低轨导航增强信号由250 bit/s的增强导航电文、1.023 Mc/s的扩频码和2***MHz的调制载波3部分组成,信号结构如图2所示。

图2 下发增强信号的信号体制Fig.2 Signal system of downlink augmentation signal
1) 导航电文编码。数据通道导航电文速率为250 bit/s,内容包括低轨卫星轨道六根数、六根数变化率、IGS发布的GPS精密星历、IGS发布的GPS精密钟差等,采用标准的(2,1,7)非系统卷积编码,编码后符号速率为500 bit/s。
2) 扩频码编码。扩频码速率为1.023 Mc/s,由2个10级移位寄存器产生的m序列G1(t)和G2(t)经模2和产生,其周期码长为1 023,码周期为1 ms。G1(t)和G2(t)的特征多项式为
(1)
选用与当前GPS卫星不同的伪随机噪声(PRN)码,并通过设计保证增强卫星的PRN码与当前GPS卫星的PRN码具有较好的互相关性。PRN码生成流程如图3所示。

图3 伪随机噪声码生成框图Fig.3 Block diagram of generation of PRN code
3) 信号调制。信号采用二进制相移键控(BPSK)调制,载波速率与基准速率10.23 MHz满足整数倍关系。
3 地面自适应卡尔曼滤波高精度单点定位算法模型
地面自适应卡尔曼滤波高精度单点定位算法主要包括4部分:周跳粗差探测修复、精密星历星钟插值、各类误差修正和自适应卡尔曼滤波[6-9]。
3.1 周跳粗差探测修复
受电离层延迟变化、多径效应等因素影响,接收机观测数据会出现中断和信号失锁。对非差精密单点定位而言,对观测数据进行周跳粗差探测修复等质量控制是实现厘米级定位的关键。周跳粗差探测包括以下2个步骤。
1) 采用电离层残差组合观测法探测周跳。电离层残差组合法将载波相位观测值进行组合处理,通过对组合值持续监测判断观测数据是否出现周跳。载波相位电离层组合观测值
LI=λ1φ1-λ2φ2=
(2)
式中:CI为电离层影响系数;f1,f2为不同导航信号载波频率;φ1,φ2为不同频率上的载波相位观测值;λ1,λ2为不同频率载波的波长;N1,N2为不同频率上相位观测值的模糊度。LI与接收机到卫星的几何距离无关,且消除了轨道误差、钟差、对流层延迟等所有与频率无关的误差项。无周跳时,LI随时间变化缓慢;有周跳时,LI会出现较为显著的变化。
2) 采用Melbourne-Wubbena组合探测法探测周跳粗差。Melbourne-Wubbena组合探测法将伪距观测值和载波相位观测值进行组合处理,通过对组合值持续监测判断原观测数据是否出现周跳粗差。组合观测值
(3)

假设观测过程中,载波相位观测值的中误差σφ=±0.01周,精密伪距定位中误差σp=±20 cm,则根据误差传播定律
(4)
可得σNΔ=±0.236 。若取4倍中误差为限差,则Nw的值域为[-0.944,0.944];若Nw不在这个值域内,则表明发生了粗差或周跳。
3.2 精密星历和钟差插值
下发导航增强信号中的GPS精密星历和钟差为当前时刻前后时间点的精密星历和钟差。因此,在进行高精度定位时需进行内插,以得到当前时刻的精密星历和钟差。本文采用拉格朗日内插法进行插值,拉格朗日插值函数为
(5)
式中:f(xk)为插值节点处的函数值;lk(x)为n次插值基函数,即
(6)
插值基函数仅与节点有关,不随函数值f(xk)的改变而改变。
选用2002年10月27日的IGS精密星历,选择PRN码为1的GPS卫星,取01:00:00~05:45:00的X,Y,Z坐标值作为分析对象,采用7~15阶拉格朗日内插03:15:00时刻的X,Y,Z值,将其与真值进行对比,得到误差随内插阶数变化曲线,如图4所示。由图可知:当内插阶数为9时,精度最高。因此,本文选用9阶拉格朗日插值。

图4 X,Y,Z坐标值插值误差随拉格朗日阶数变化曲线Fig.4 Change of X, Y and Z interpolation errors along with different interpolation orders
3.3 不同误差源修正方法
非差精密定位必须考虑修正所有误差项,主要包括与信号传播、导航卫星和测站有关的3类误差。导航卫星星历和星钟误差修正已在3.1节中做过介绍,其余误差及其修正方法见表1。
3.4 扩展卡尔曼滤波模型
使用扩展卡尔曼滤波进行精密单点定位[10-11],建立滤波状态和观测方程为
Xk=Φk,k-1Xk-1+ωk
(7)
Zk=HkXk+vk
(8)
式中:Xk为k历元状态向量;Φk,k-1为k-1历元至k历元的状态转移矩阵;ωk和vk分别为系统噪声向量和观测噪声向量,且均为零均值高斯白噪声;Zk为k历元观测值;Hk为k历元观测方程系数矩阵。选取X=[xyzΔtZWDN1N2…Ns],其中:
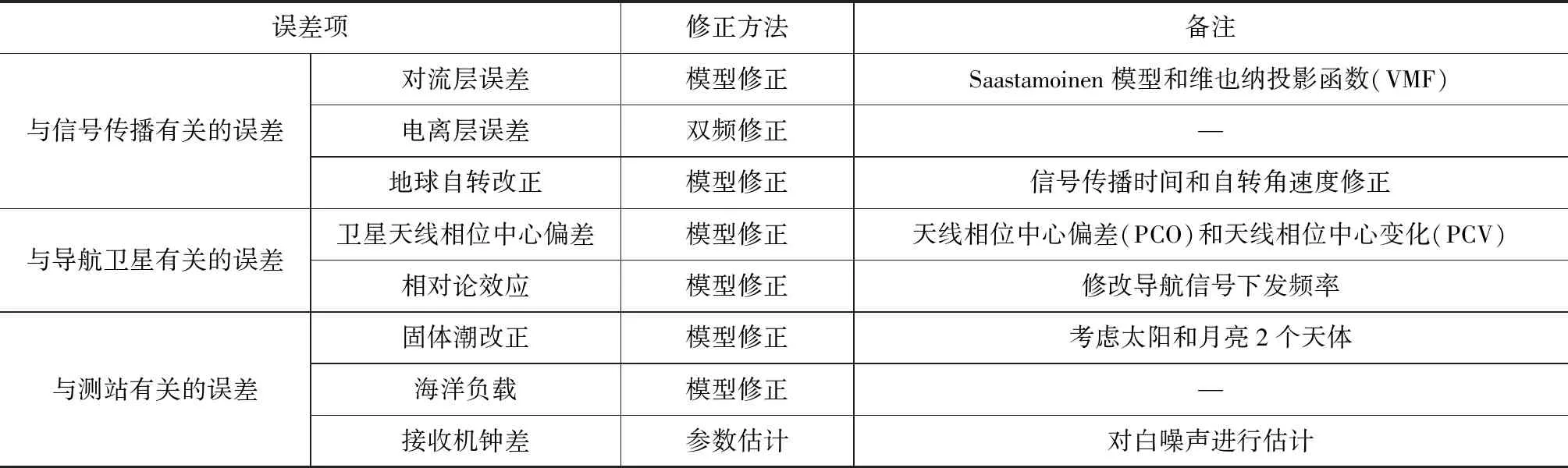
表1 各项误差及其修正方法
(x,y,z)为接收机位置;Δt为接收机钟差;ZWD为天顶对流层湿延迟;N为模糊度。
(9)
式中:Qk-1为系统噪声向量的方差阵。

(10)
式中:Rk为系统量测噪声的方差阵;I为单位阵。重复上述计算,不断进行预测和修正,得到用户接收机位置高精度定位结果。
4 基于低轨增强信号的地面高精度单点定位程序设计
根据上述理论,地面导航终端接收低轨增强信号后进行地面高精度单点定位的流程主要包括数据准备阶段、精密星历和星钟插值阶段、周跳粗差探测阶段、误差修正阶段和卡尔曼滤波解算阶段。数据准备阶段需满足双频GPS卫星数大于4,收到精密星历和星钟时刻点大于9。其中:双频GPS卫星数大于4是为保证电离层误差消除和基本卫星导航定位;精密星历星钟时刻点大于9是为保证后续拉格朗日插值的插值精度,9阶拉格朗日插值为精度最优的方案。具体流程如图5所示。

图5 地面定位程序设计流程Fig.5 Flowchart of ground positioning procedure
5 在轨试验情况及在智能驾驶领域应用展望
2017年11月15日,低轨导航增强试验星和“FY-3D”星在太原卫星发射中心发射升空。11月15日至12月5日,进行了导航增强载荷在轨测试工作。相关情况如图6所示。

图6 载荷研制、卫星发射及在轨测试情况Fig.6 Payload development, satellite launch and on-orbit experiment
测试中,地面用户终端被放置于楼顶空旷处。卫星过境地面站时通过上行通道上注IGS的GPS精密星历和星钟。星上导航增强载荷接收处理后下发导航增强信号。地面用户终端接收增强信号和GPS卫星导航信号。测试点基准值通过实时动态差分(RTK)定标接收机多次测量求平均值获得。该RTK接收机定位精度优于1 cm。
经测试,地面用户终端在低轨卫星仰角为5°时可实现增强信号的跟踪捕获。在增强定位前,地面用户终端三轴定位精度约为10 m;接收增强信号进入增强高精度定位后,各轴定位精度均优于0.3 m。三轴定位精度如图7~10所示。

图7 增强前后定位误差曲线Fig.7 Positioning error curves before and after augmentation
由测试可知:地面用户增强后能实现优于0.3 m的定位精度,其中,X,Y和Z方向上的定位精度存在差异,这主要是由不同方向上对流层、固体潮、多路径效应等误差因素影响不同导致。在轨试验结果表明:低轨导航增强卫星对地导航增强服务可消除当前高精度定位对地基站的依赖,解决广大无导航基准站覆盖地区的高精度定位难题。

图8 WGS84坐标系X方向定位误差情况Fig.8 Error in X direction under WGS84 coordinate system

图9 WGS84坐标系Y方向定位误差情况Fig.9 Error in Y direction under WGS84 coordinate system

图10 WGS84坐标系Z方向定位误差情况Fig.10 Error in Z direction under WGS84 coordinate system
6 结束语
本文提出了一种基于低轨卫星增强的非差高精度导航定位技术,通过导航增强载荷在轨试验,验证了低轨卫星对地导航增强原理,初步实现了准实时分米级的高精度定位。后续将进一步优化地面定位算法、误差修正模型和导航增强载荷硬件设计,实现更高精度定位;进一步提高收敛速度,优化空间段低轨导航星座设计,实现对我国或全球的持续增强服务覆盖能力。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
导航定位学报(2018年3期)2018-09-03 00:56:16
载人航天(2016年4期)2016-12-01 06:56:24
山东工业技术(2016年15期)2016-12-01 05:31:14
水利科技与经济(2016年9期)2016-04-22 01:07:30
信息记录材料(2016年4期)2016-03-11 15:22:33