
基于改进复杂追踪算法的结构模态参数识别
2019-03-05 09:33尤传雨邵永亮
噪声与振动控制 2019年1期
常 军,刘 昊,尤传雨,2,邵永亮,3
(1.苏州科技大学 土木工程学院,江苏 苏州 215011;2.江苏建科工程咨询有限公司,南京 210019;3.江苏乾程工程技术有限公司,江苏 无锡 214028)
模态参数识别是结构健康监测的核心内容之一,如何快速准确地从结构响应中识别结构模态参数已成为当前的研究热点。近年来,盲源分离(BSS)逐步发展为现代信号处理的有效工具,在通信工程、语音处理、图像处理等领域具有重要的理论意义和实际应用价值[1]。盲源分离是指在信号的理论模型和源信号无法精确获知的情况下,如何从观测信号中分离出各源信号的过程[2]。对于具有时序结构的信号,传统的盲源分离往往只利用信号的统计特性,而忽略了信号的时序特性,因而不能充分利用信号自身特性,对信号不能较好地处理[3]。结构振动响应是典型的时间信号,当前盲源分离算法对响应信号处理存在一定的限制,如独立分量分析(ICA)算法无法有效识别高阻尼结构[4-5];2阶盲辨别(SOBI)无法识别聚集模态等[6]。
复杂追踪(CP)是近期发展起来的一种盲源分离技术,该方法结合了信号的统计特性和时序结构,通过寻找合适的投影方向,使该方向投影信号的复杂度最小,从而实现对混合信号的分离[7]。基于固定梯度的复杂追踪算法进行目标函数寻优时,具有收敛速度慢,易陷入局部极值,且针对不同的模型要人为选择合适的学习步长等不足,限制了该算法的实际应用性。Shi等人将固定点算法应用于目标函数的优化问题,简单易行,不需要用户选择学习率,但也存在对初始值敏感等问题[3]。为了使算法广泛应用于实际工程结构,论文对原梯度算法作出改进,将最优步长思想引入复杂追踪算法中,并对算法的迭代过程进行优化,使其收敛精度和应用性能都有一定的提高,并将改进算法应用于模态参数识别领域。
1 复杂追踪基本理论
1.1 复杂追踪问题描述
线性瞬时盲源分离模型表示为[8]

式中:t为时刻,y(t)为n个未知源信号混合而成的n维观测信号,;A为未知的n×n维混合矩阵;x(t)为n个源信号组合而成,;
复杂追踪的目的就是在混合矩阵A和源信号x(t)未知的情况下,寻找一个解混向量wi,使得分离成分拥有最小复杂度,即逼近最简单的源信号

1.2 目标函数
简单起见,假设信号是零均值和单位方差的。信号y在t时刻的值由t时刻以前的值预测

其冗余项为

根据信息论基本原理,对冗余项的编码比对信号原始值的编码更容易,冗余的编码长度由它的熵的和来渐进逼近。编码复杂度可用下面的式子来近似

采用线性自回归模型对信号进行预测,即

式中:τ表示时滞个数,α为回归参数。则式(5)进一步简化为可以用一个以w为自变量的目标函数作为Kolmogoroff复杂度的近似

G是可微分的函数,用以估计信号的概率密度函数。已被证实是非常有用的

1.3 梯度优化算法
为了最优化,公式(7)中复杂度目标函数的逼近,A.Hyvärinen发展了一个梯度下降方法,从时间序列中分离感兴趣的成分。具体算法如下

式中:μ为每次迭代的步长,g(∙)为非线性函数G(∙)的导函数。
然而因为其迭代系数是固定的,步长选择过小,会很大程度限制算法的收敛速度;步长选择过大,可能会导致算法不收敛的问题[9]。针对不同的问题,都需要人为选择合适的学习步长,这就限制了算法的有效应用。
1.4 固定点优化算法

对于复杂度目标函数(7)的优化问题,可以用固定点算法求解,进而使用牛顿算法进行迭代优化。记在约束条件∥w∥2=1的情况下,根据Kuhn-Tucker条件,(wTx(t))=E{G(wT(z(t))}满足

其中:β为常数。下面采用牛顿法来求解此方程,得牛顿迭代算法如下

即优化目标函数(7)的不动点算法为
固定点算法简单易行,不需要用户选择学习率,并且算法具有快速收敛的性质,然而该算法也继承了牛顿算法的不足,比如对初始值敏感等问题,当分离矩阵的初始值离极值点较远时,算法可能出现不收敛的情况。
2 改进的复杂追踪算法
2.1 步长的自适应调整
调整步长对于算法能否较快地收敛起着重要作用,也是使算法能够更好地应用于实际的关键问题。一个有效的解决方法是采用变步长算法,步长的选择根据输入信号和混合矩阵的变化而自适应调整。利用随时间变化的学习速率建立步长的函数,利用该函数进行步长的调整,这样既可以加快收敛,又能保证性能的稳定。
复杂追踪的最终目的是找到一个最优向量wopt,使其符合下式

对于式(9),为了确定wopt,应使得

令上式左边等于dw,定义自适应误差函数为

随着分离过程的进行,ε(t)逐渐减小,其值越小,代表信号被分离的程度越高。为了加快收敛速度,第1阶段用大步长;在第2阶段,为了提高跟踪性能并且减小稳态误差,用ε(t)作为指数函数的指数部分来控制步长的自适应变换。整个过程的步长公式为

式中:β为介于0和1之间的常数
2.2 非线性函数的自适应选取
为了使算法的分离效果更好,非线性函数的选取要尽可能地和源信号的概率密度函数近似。
对于振动信号而言,不同的阻尼参数使得信号的衰减程度不同,其统计分布特性也会有所不同,可能为亚高斯分布,也可能为超高斯分布。因此,如果选用固定的非线性函数,复杂追踪算法的分离效果可能不理想。
论文在源信号分布特性未知的情况下,采用一种根据信号的峭度值来自动选择不同的非线性函数的方法。如下

其中:g(∙)为非线性函数G(∙)的导函数,K表示信号的峭度值。当K所显示时滞个数为正值,表示信号为超高斯分布信号;K为负值,表示信号为亚高斯分布信号。
3 CP识别结构模态参数

由动力学知识可知,线性振动系统的自由响应为式中:qi(t)=ai(t) sin(ωdit+θi)为正则坐标,ωdi为有阻尼频率,θi为相位角,对于自由响应:ai(t)为指数衰减函数 exp(-ξiwnit),ξi、wni分别为阻尼比与固有频率;ϕi为固有振型向量;n为系统的模态数。模态参数识别的任务就是从响应信号x(t)中识别出振型矩阵Φ、各阶频率wi和阻尼比ξi。
对比式(1)和式(19)可得,A=Φ,s(t)=q(t),即可以把模态响应q(t)看作源信号,振型矩阵Φ看作源信号的混合矩阵,则结构自振响应信号x(t)是模态响应q(t)经过振型矩阵线性加权所得的混合信号(即观测信号)[10-11]。CP识别结构模态参数流程如下:
(1)通过复杂追踪理论,得到分离矩阵W,继而求得振型Φ=W-1;
(2)通过y(t)=Wx(t),从结构响应中分离出y(t),即模态响应。若结构响应为随机响应,则采用相关函数法提取结构的近似自由振动响应信号。
(3)通过Hilbert变换便可以从模态响应中识别出各阶固有频率和阻尼比。
4 实例分析
4.1 自由响应下简支梁的结构模态参数识别
建立如图1所示的10单元的简支梁模型,梁全长为10 m,模拟简支梁的自由振动响应,提取各节点处加速度响应,响应信号时间长度50 s,采样频率1 000 Hz,设置Rayleigh阻尼,1阶、6阶阻尼为2%,阻尼系数为α=0.5763,β=0.00007。提取结构模型的前4阶模态振型和固有频率。

图1 简支梁模型
分别采用基于固定梯度的复杂追踪算法(梯度CP)、基于固定点的复杂追踪算法(FastCP)和本文改进的算法(改进CP)对结构的自由响应信号进行分析,分离图形如图2所示,模态参数识别结果如表1、表2、表3所示。
对比图2中的(b)、(c)、(d)可发现,梯度算法分离的信号波形图较差,固定点算法和改进后的复杂追踪算法分离的信号波形较好。

图2 结构自振响应信号分析
表3中MAC为模态置信准则,其表达式为[12]


表1 简支梁模型固有频率识别结果

表2 简支梁阻尼比识别结果

表3 简支梁振型MAC值识别结果
由表1、表2、表3可看出,改进的复杂追踪算法识别的频率、阻尼和振型MAC值均优于梯度CP和FastCP的识别结果。
简支梁自由振动振型图如图3所示。
4.2 环境激励下简支梁的结构模态参数识别
实际土木工程结构的工作条件是随机的环境激励。因此,为了验证改进算法应用于实际工作结构模态参数识别的可能性,对模拟的结构系统施加高斯白噪声(GWN)。设置Rayleigh阻尼,1阶、6阶阻尼为2%。提取结构模型的前四阶模态振型和固有频率。
分别采用梯度CP、FastCP、改进CP对结构的自由响应信号进行分析,分离图形如图7所示,模态参数识别结果如表4、表5、表6所示。
由图4可看出,基于梯度的复杂追踪算法和基于固定点的复杂追踪算法分离的信号波形较差,第1阶信号受到第2阶次的干扰较大。
而由图4(d)可看出,改进的复杂追踪算法分离的信号较为独立,峰值较为明显,没有过多毛刺,表明改进的复杂追踪算法识别环境激励下简支梁结构的模态参数是可行的,且效果要好于基于梯度和固定点的复杂追踪算法。
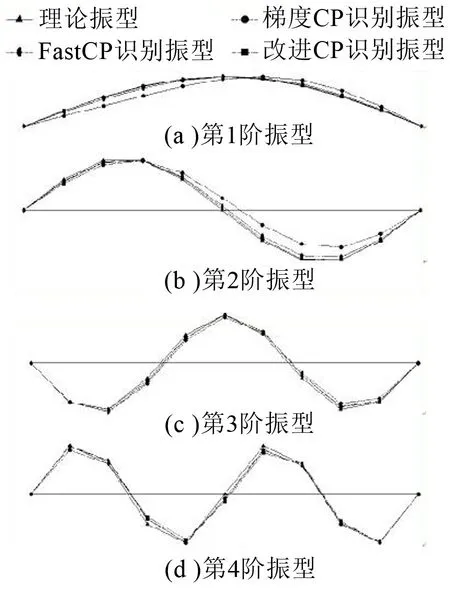
图3 三种复杂追踪算法识别简支梁前4阶振型对比图
由表4、表5、表6可看出,改进的复杂追踪算法识别的频率、阻尼和振型MAC值均优于梯度CP和FastCP的识别结果。
复杂追踪技术识别环境激励下简支梁前4阶振型如图5所示。
4.3 三层框架试验模型分析
建立如图6所示的三层钢框架结构(第一层加入阻尼器),各层布置加速度传感器,用以测量框架各层横向加速度响应时程,传感器采样频率为5 128 Hz。
将该框架结构放置在小型振动台上进行脉冲试验,脉冲试验开始前传感器开始采集数据记为0 s时刻,第5.85 s时开始激励,第20 s结束振动,收集提取全部试验数据。利用ABAQUS对框架进行有限元模拟,将模态分析得到的频率及振型作为理论值。由于峰值法(PP)是一种比较成熟的算法,因此数据处理前,先采用PP法识别该试验框架的模态参数,并与各种CP算法的参数识别结果进行对比。分别采用梯度CP、FastCP、改进CP对结构的自由响应信号进行分析,分离图形如图7所示。

图4 环境激励下结构响应信号分析

表4 简支梁固有频率识别结果

表5 简支梁阻尼比识别结果

表6 简支梁振型MAC值识别结果
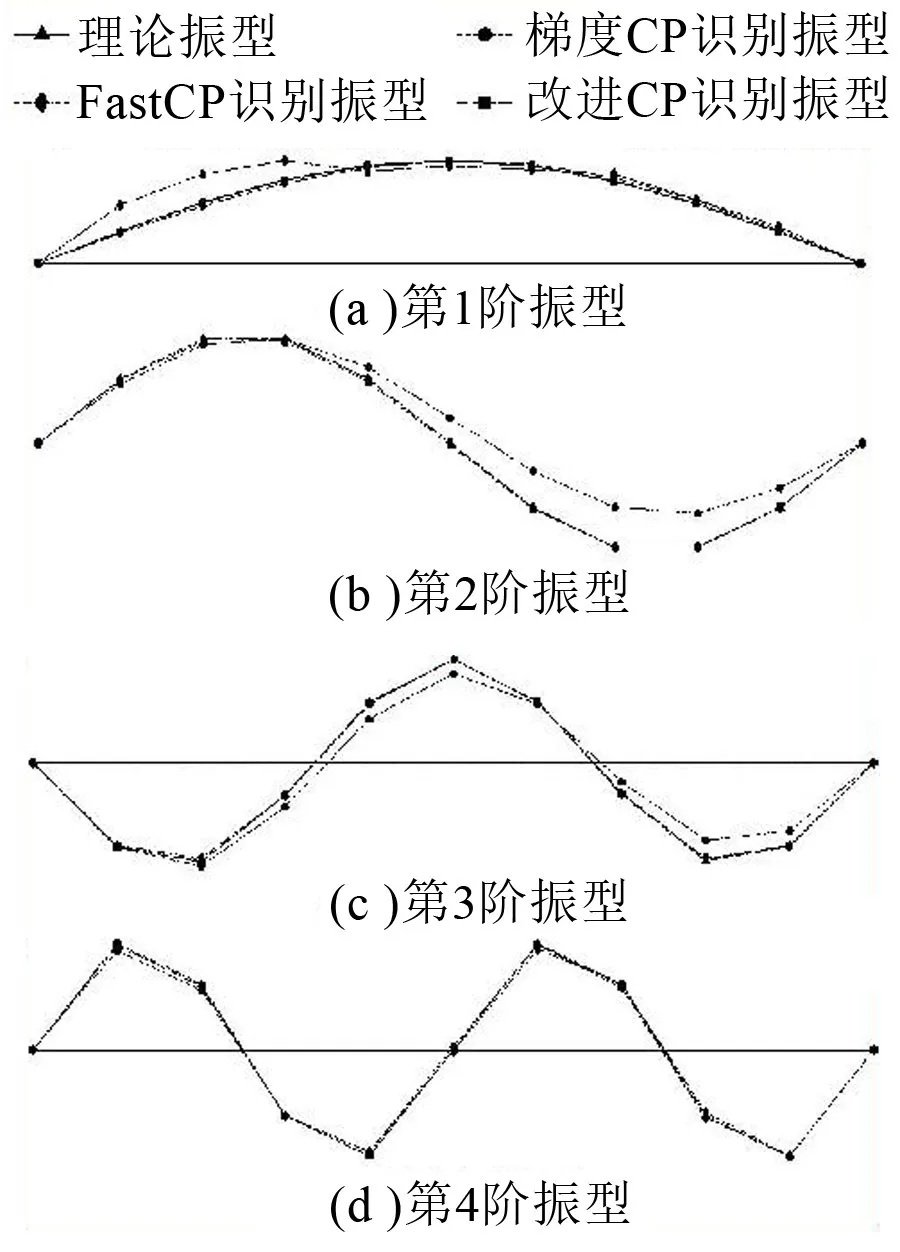
图5 三种复杂追踪算法识别环境激励简支梁前4阶振型对比图
对比图7中的(b)、(c)、(d)可发现,改进后的复杂追踪算法分离出的各条信号峰值更为明显,说明各阶模态响应更为独立。
表7和表8数据表明:(1)PP法和三种复杂追踪算法在对频率的识别上较为准确,而改进后的复杂追踪算法的识别结果与理论值及PP法均更为接近;(2)结构在施加阻尼器后具有高达17.9%的阻尼,PP法未能识别出结构第2阶阻尼,而三种复杂追踪算法均能识别出结构的各阶阻尼,且改进算法识别结果较好。
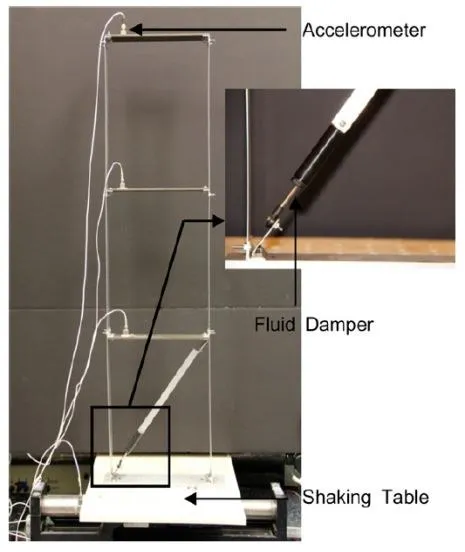
图6 三层框架试验简化模型

表7 结构频率的识别结果
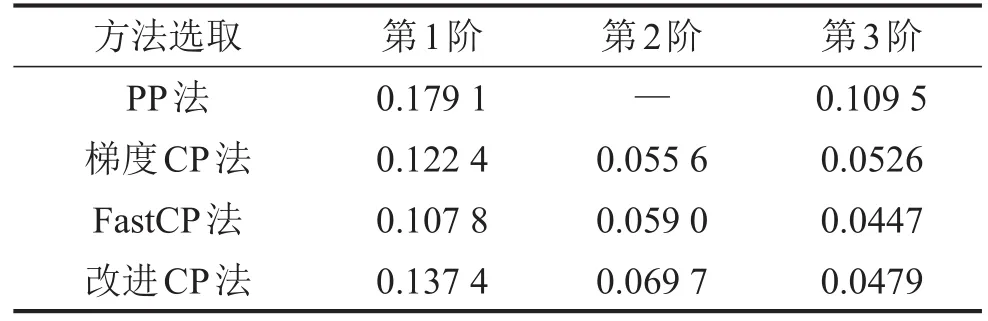
表8 结构阻尼比的识别结果
将各种算法识别的振型与理论振型做相关度计算,即MAC值来判断方法的优劣,结果如表9所示。
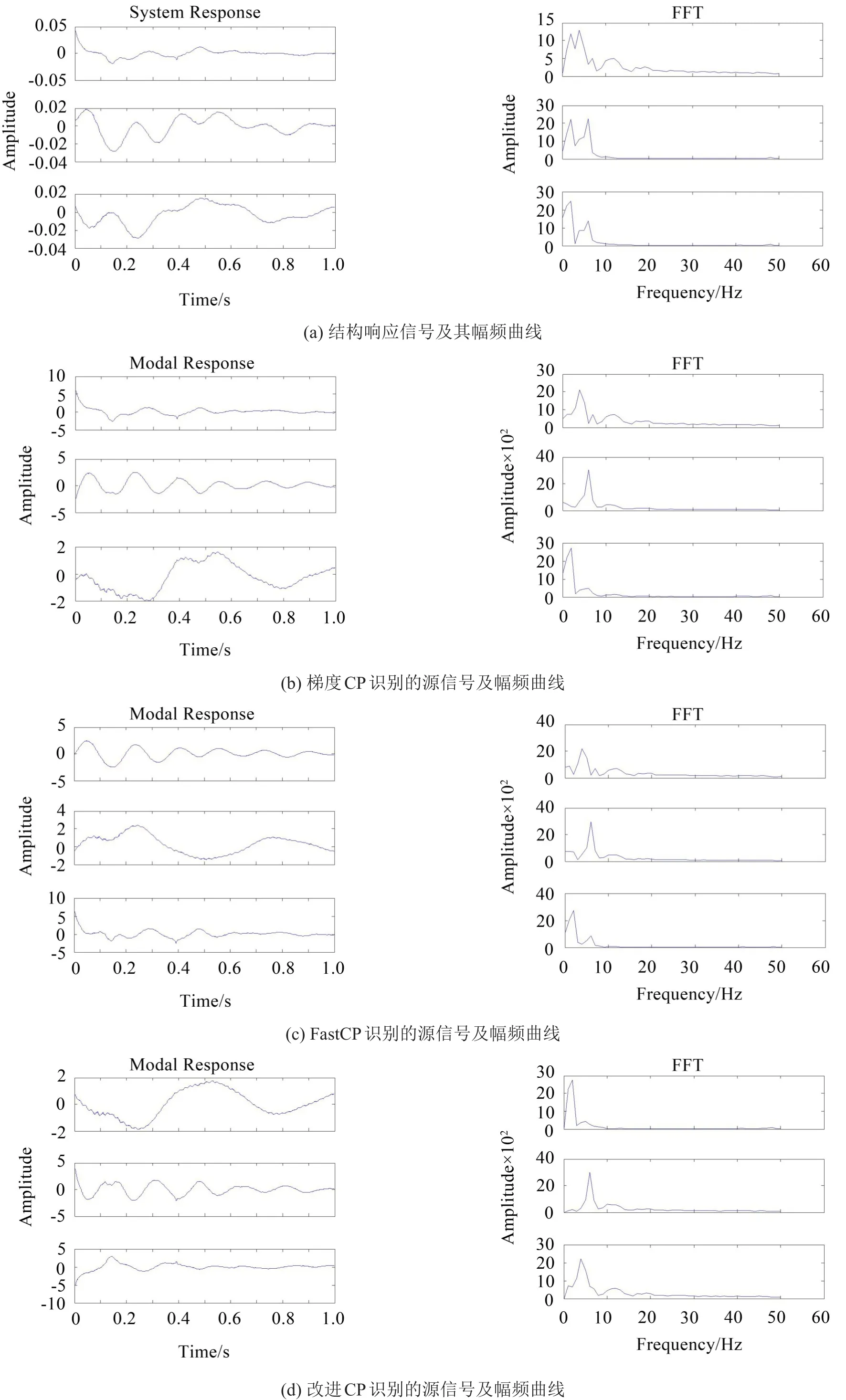
图7 结构响应信号分析
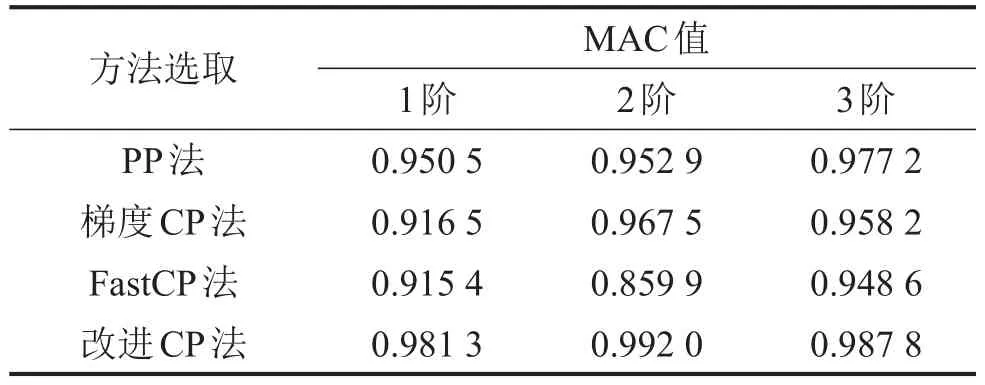
表9 三层框架振型MAC值识别结果
从中可看出,改进的复杂追踪算法识别的振型MAC值均达到98%以上,且均高于梯度CP和FastCP的识别结果。
振型图如图8所示。

图8 三层框架试验振型图
识别结果验证了该算法对于实际工程结构应用的可行性和较高的识别精度,为算法的实际应用提供了参考依据。
5 结语
提出了复杂追踪算法的改进算法,使其能够根据每次迭代过程的分离矩阵自适应调整步长的大小,同时根据分离出的信号峭度值自动选择相应的非线性函数,使得算法的分离精度有了进一步的提升,并能够更好地应用于各种模型。
(1)将改进的复杂追踪算法应用于结构模态参数识别中,通过对简支梁模型进行数值模拟,识别结果表明,改进后算法的识别精度均得到显著提高;在高斯白噪声环境激励下,本改进CP算法对结构的识别精度也比梯度CP和FastCP的识别结果更精确。
(2)对三层框架结构试验数据进行参数识别,并以PP法作为参考标准,识别结果表明改进的复杂追踪算法识别结果与PP法更为接近,在实际工程应用中具有很高的可靠性。
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
成都信息工程大学学报(2021年5期)2021-12-30
中国惯性技术学报(2020年2期)2020-07-24
水电站设计(2020年4期)2020-07-16
特种结构(2019年2期)2019-08-19
装备制造技术(2019年4期)2019-06-21
价值工程(2017年4期)2017-02-16
科技创新导报(2016年21期)2016-12-17
