GAMIT与TBC混合基线平差的优化算法及精度分析
2019-02-28 02:44邵成立邵珍珍
城市勘测 2019年1期
邵成立,邵珍珍
(青岛市勘察测绘研究院,山东 青岛 266032)
1 引 言
GAMIT软件是由美国麻省理工学院(MIT)和加州大学圣地亚哥分校Scripps海洋研究所(SIO)共同开发的GPS数据处理、分析软件,其主要采用双差解算模式,可用来进行测站坐标和速度场、震后分析、同震分析、卫星轨道、大气延迟以及地球定向等参数的估计[1]。GAMIT软件采用Fortran语言进行编写,由多个功能不同、且可独立运行的程序模块组成,该软件GPS基线解的相对精度可达10-9,解算短基线的精度也能优于1mm,是目前世界上最优秀的GPS分析软件之一。近几年来,GAMIT软件在自动化GPS数据处理方面做了明显的改善。不仅可在基于工作站的Unix操作平台下运行,而且可以在基于微机的Linux平台下运行[2]。
TBC(Trimble Business Center的简称)是美国天宝Trimble的新一代后处理软件,其不仅能够处理GNSS数据,还可以处理全站仪、水准仪、3D扫描仪数据。其解算静态基线的速度是TGO软件的10倍多,基线解算相对精度可达10-5左右,可以处理GPS的L1/L2/L5以及GLONASS的数据,并且可以自定义起算点和起算边,实现GNSS数据与常规全站仪、电子水准仪数据的联合平差[3]。
在某些大型GNSS控制网工程中,由于对长基线解算精度的要求,长基线需要使用GAMIT进行解算,短基线需要使用TBC进行解算,而这两种软件解算的基线精度相差甚大,本文以青岛地铁8号线GNSS控制网为例,提出对GAMIT和TBC解算的基线分别定权,并在科傻平差软件里合并成一个文件进行平差的优化算法,通过对其精度进行分析得到了一些可借鉴的结论。
2 工程背景
青岛地铁8号线全长60.1 km,其首级平面控制网采用GNSS静态进行施测,是典型的线性工程控制网,为了和青岛其他已建及规划中的地铁线路保持衔接,GNSS控制网以青岛市连续运行基准站(QDCORS)作为起算[4],考虑到各个CORS站点距离测区较远,一般为十几千米至几十千米,甚至超过 100 km,为了提高长基线解算精度,选取地铁8号线GNSS控制网中的若干个点与起算CORS站点组成框架网,进行长时间观测,观测时间为4个小时,其余时段观测一个半小时,具体采用的观测参数如表1所示,观测网图如图1所示。
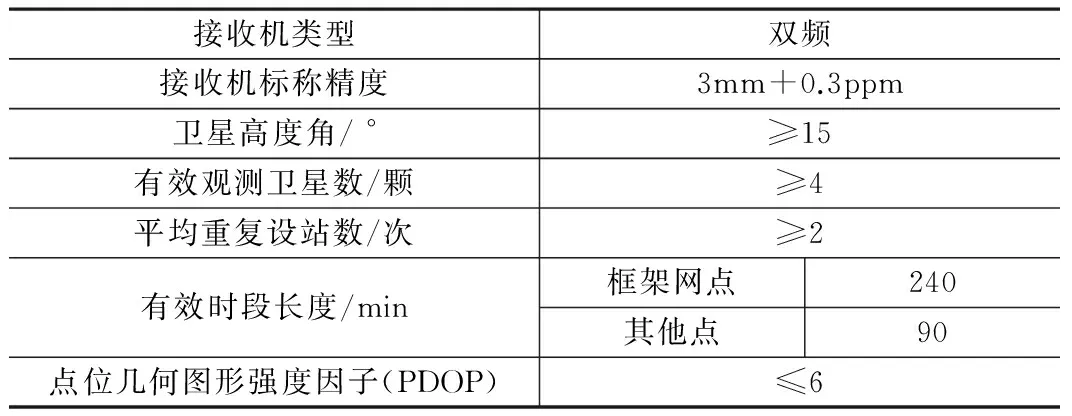
GNSS静态外业观测技术参数 表1
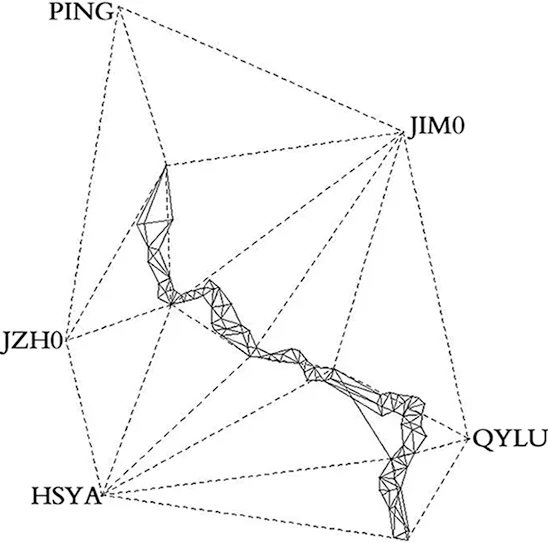
图1 青岛地铁8号线GNSS控制网图
由于工程规模大、工期紧,作业时投入2个GNSS观测组从南北分别同时观测,工程北部以及框架网采用6台天宝R8-4进行观测,其标称精度为 5 mm+0.5 ppm,观测完毕后使用天宝随机软件导出TO2原始数据文件;工程南部采用6台徕卡GS14进行观测,其标称精度为3 mm+0.3 ppm,观测完使用徕卡随机软件导出m00原始数据文件,为避免南北两部分使用不同的软件解算基线时导致全线精度不均匀,采用Teqc软件将徕卡观测原始文件转换成Rinex标准格式,并用TBC进行基线解算,转换命令参考如下:
teqc -lei mdb +navХХХ.17n 0319_2508.m00>ХХХ.17o
3 基线解算与定权平差
3.1 基线解算
基线解算过程就是由多台GPS接收机在野外通过同步观测采集到的观测数据,确定接收机间基线向量及其方差-协方差阵的过程。
同一时段观测值的数据剔除率宜小于10%。GPS控制测量外业观测的全部数据应经同步环、异步环及复测基线检核,并应满足下列要求:
(1)同步环各坐标分量闭合差及环线全长闭合差,应满足下列各式要求:
式中:n——同步环中基线边的个数
W——同步环环线全长闭合差(mm)
σ——基线测量中误差,单位为毫米(mm)
(2)异步环闭合符合下式的规定:
式中:n——异步环中基线边的个数
σ——基线测量中误差,单位为毫米(mm)
(3)复测基线较差不超过下式规定
式中σ——基线测量中误差,单位为毫米(mm)
数据检验中,当重复基线、同步环、异步环或附合路线中的基线超限时,应舍弃基线后重新构成异步环,所含的异步基线数和闭合差应符合规范要求,否则要进行重新观测。
为提高与CORS站相连接长基线解算精度,框架网采用GAMIT进行解算,其余基线采用TBC进行解算。采用GAMIT进行长基线处理时,首先对外业观测数据的齐全性进行检查与整理,以年积日为单位整理观测数据,并将原始观测数据转换为Rinex格式数据,同时使用Teqc软件对整理好的数据做观测数据质量分析。根据外业观测手簿,编制观测仪器、天线、天线高与天线高量取位置等对照表,检查点名一致性与正确性、接收机与天线型号的正确性、天线高的正确性及年积日的一致性等。下载数据处理所使用的广播星历、精密星历以及表文件。
采用TBC进行短基线处理时,应对导入文件的点名、天线类型、量高方式等进行检查确认,在基线处理设置中,星历表选择自动,基线处理解类型选择固定解,频率设置成多频,并处理所有间隔时间的基线数据,其他设置选择默认参数。
基线经重复基线、同步环及异步环闭合差检验,检验不合格或者基线解算精度较差时进行基线精化处理,主要精化处理方法如下:
外业观测时通过手簿或测前在软件中将卫星截止高度角设置成15°,以降低电离层与对流层的干扰,采用相关优化模型对对流层和电离层延迟进行改正[5];基线解算时,以青岛市连续运行基准站作为起算点[6];屏蔽卫星观测时间太短的数据,使之不参与基线解算,以确保解算基线的质量;通过减小编辑因子来删除残差较大的观测值,以此来减小多路径效应,或者通过删除多路径效应严重的时间段或卫星的方法[7]。
3.2 定权平差
由于GAMIT和TBC两种软件解算基线精度相差约1万倍,将两种不同精度的基线进行合并平差前,通过科傻平差软件对其分别定权,GAMIT解算基线和TBC解算基线的权值分别设置成10000和1,再合并成一个文件进行平差计算。平差前,在青岛当地坐标系下,对拟采用的CORS站起算点进行兼容性检查分析,并结合点位分布情况,选用兼容性好的点位作为二维约束平差的起算数据,数据解算流程如图2所示。
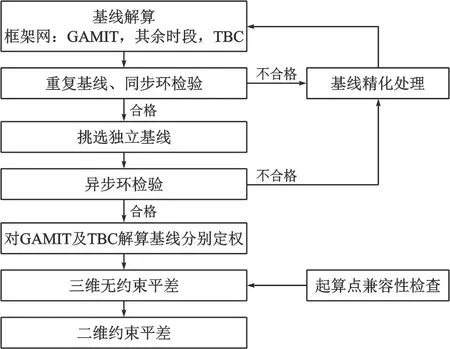
图2 数据解算流程图
4 精度分析
对GAMIT和TBC两种软件解算的基线分别在定权和不定权两种情况下进行合并平差,考虑到三维无约束平差相关指标更能体现基线内符合精度,对不定权以及定权合并三维无约束平差后的相关指标进行了对比,如表2所示:

两种平差方法精度指标对比 表2
从表2可以看出,将GAMIT解算基线和TBC解算基线分别定权再平差,其残差加权平方和、中误差、最弱点以及最弱边精度均高于不定权平差的结果。
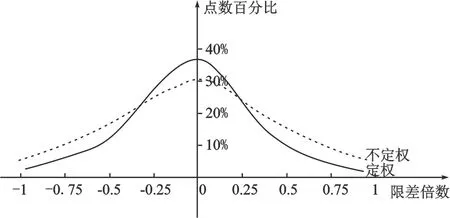
图3 两种平差方法异步环闭合差分布图
为进一步检验定权后GAMIT基线与TBC基线内符合精度情况,对两种平差方案中形成的异步环闭合差进行统计选取异步环闭合差中线路闭合差及对应的限差分布做分析,结果如图3所示。从图中可以看出,将GAMIT与TBC解算基线分别定权后形成的异步环闭合差更为集中,图形更为向中间收敛,基线网形成的闭合差大部分都集中在0.25倍限差内,基线网内符合性更高。
5 结 语
针对某些大型GNSS控制网工程的实际需求,基线解算中长基线往往使用GAMIT进行解算,短基线使用TBC进行解算,而这两种软件解算的基线精度相差甚大,本文提出对GAMIT和TBC解算的基线分别定权,并在科傻平差软件里合并成一个文件进行平差的优化算法。将该方法应用到青岛地铁8号线GNSS控制网解算中,结果表明:将GAMIT解算基线和TBC解算基线分别定权再平差,其残差加权平方和、中误差、最弱点以及最弱边精度均高于不定权平差的结果。通过对其精度进行分析得到了一些可借鉴的结论:
(1)GAMIT与TBC解算基线精度相差甚大,若在一个GNSS控制网中有GAMIT和TBC两种软件解算的基线,应对这两种基线分别定权后再合并平差,该方法形成的基线网内符合性更好,残差加权平方和、中误差等精度指标更高,闭合差分布更为集中。
(2)GNSS控制网中若起算点距离测区较远,与起算点连接的时段应进行长时间观测,以提高长基线解算精度。
(3)在城市地铁建设过程中,采用CORS站作为GNSS控制网起算点,可有效保障各条在建以及规划中的地铁线路空间基准的一致性。
(4)线性工程GNSS控制网若采用不同品牌的接收机进行观测,为保证全线控制网精度的均匀性和一致性,可通过Teqc软件将各类接收机的原始数据转换成Rinex标准格式,并采用同一软件进行基线解算。
猜你喜欢
科学(2020年5期)2020-11-26
现代城市轨道交通(2020年1期)2020-02-14
铁道通信信号(2020年11期)2020-02-07
中国惯性技术学报(2019年3期)2019-10-15
军事文摘(2018年24期)2018-12-26
中国化妆品(2017年12期)2017-06-27
舰船电子对抗(2016年5期)2016-12-13
太空探索(2016年7期)2016-07-10
太空探索(2015年8期)2015-07-18
航天器工程(2014年5期)2014-03-11