基于优化K-GM(1,1)在桥梁变形预测中的应用研究
2019-02-28 02:43罗少欢豆红磊
城市勘测 2019年1期
罗少欢,豆红磊
(1.珠海市测绘院,广东 珠海 519000; 2.湘潭大学土木工程与力学学院,湖南 湘潭 411105)
1 引 言
变形监测是对监视对象或物体进行测量,以确定其空间位置随时间的变化特征[1]。桥梁工程变形监测是为了及时了解在施工过程中支护结构和邻近建(构)筑物的变形规律及动态发展趋势,并对桥梁体系的稳定性、可靠性和安全性进行预测预报。分析变形监测的方法很多[2~5],其中灰色系统GM(1,1)模型[6]以其显著的优势被广泛应用于变形监测中,并取得了显著的效果。文献[7]指出,在稳定的数据序列中,采用传统GM(1,1)模型预测,可以很好地反映数据序列的变化趋势。文献[8]指出传统GM(1,1)模型,数据序列初始值过旧导致预测精度不高,采取更新数据序列的初始值对传统模型进行了改进,建立新陈代谢GM(1,1)模型,虽然验证了方法的可行性,但是对于原始序列呈现波动较大的情况下,依然存在问题。文献[9~11]基于传统GM(1,1)模型建模机理,从原始序列、初始值、背景值等方面对其优化,但该方法对含噪声较大的数据拟合精度并不高。卡尔曼滤波是一种能够从观测量中估计出所需数据信号的滤波算法,对数据具有消噪和平滑作用,能对动态系统进行实时数据处理,该滤波最大的特点是剔除随机干扰噪声[12]。本文参考了文献[13,14]的设计思路,利用卡尔曼滤波具有较好的抗噪能力,对原始数据进行滤波降噪处理,基于灰色模型建模机理,分别对滤波后的初始值、背景值进行优化,建立了基于K-GM(1,1)模型,以角比西大桥沉降监测数据进行预测分析,并与传统GM(1,1)模型进行对比,工程实例分析表明,基于优化K-GM(1,1)模型的预测精度高于传统GM(1,1)模型,为以后同类桥梁变形监测提供参考。
2 模型分析
2.1 卡尔曼滤波模型
不考虑控制作用,离散系统卡尔曼滤波方程可表示为:
(1)
式中:Xk是系统的n维状态序列;Zk是系统的m维观测序列;Wk-1是p维系统过程噪声序列;Vk是m维观测噪声序列;Φk,k-1是系统的n×n维状态转移矩阵;Γk,k-1是n×p维噪声输入矩阵;Hk是m×n维观测矩阵。系统过程噪声和观测噪声的统计特征为:
(2)
式中:Qk是系统过程噪声Wk的p×p维对称非负定方差矩阵;Rk是系统观测噪声Vk的m×m维对称正定方差矩阵;δkj是Kronecker-δ函数。

状态一步预测:
(3)
状态估计:
(4)
2.2 传统GM(1,1)模型的建立


(3)建立影子方程
(5)
式中参数a为发展系数,反映x的发展趋势;b为灰作用量,反映数据间的变化关系。
(6)
(7)
(5)对式(7)进行累减,得到原始序列x(0)的还原式:
(8)
2.3 优化GM(1,1)模型[15]
2.4 GM(1,1)模型的精度检验
为判断GM(1,1)模型进行预测的可靠性,需要对模型精度进行检验,常用的灰色预测模型检验方法一般有残差检验合格模型、均方差比合格模型和小误差概率合格模型。
(1)残差检验合格模型

残差序列:
(9)
相对误差序列:

(10)


(2)均方差比和小误差概率合格模型

分别为残差的均值、方差。



精度检验等级参照表 表1
3 实例分析
角比西大桥位于苏洼龙水电站工程区上游角比西村沟口上游约 500 m处。主桥设计为三跨预应力混凝土连续钢构桥,3号4号桥墩为主桥桥墩,承台高 73 m。以2017-8-1~2017-8-9监测点实测数据为例,选取具有代表性的CT3监测点9期数据进行分析,第一步对原始序列进行卡尔曼滤波降噪处理,第二步对处理后的数据按照文献[15]对初始值、背景值进行改进,建立优化的K-GM(1,1)模型,最后以前5期监测数据作为建模数据,后4期数据进行模型预测,并与传统GM(1,1)模型预测结果对比,分析监测点CT3的沉降变化趋势,两种模型对监测数据拟合预测结果如表2所示。其中实际观测数据为累计沉降值,单位为mm。
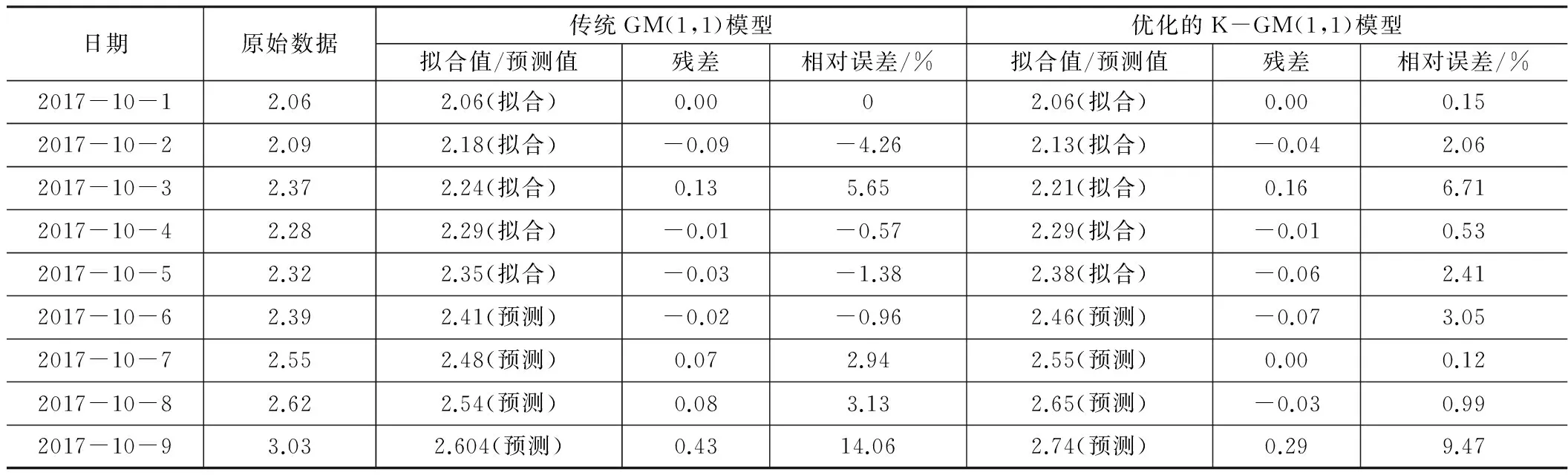
监测点CT3拟合预测结果检验表 表2
在沉降监测建模过程中,卡尔曼滤波模型认为监测点位移速度的均值不变,并在滤波中将监测点的位置及其位移速度作为状态参数,将唯一加速度视为动态噪声[16],设tk时刻监测点的位移量为xk,位移速度向量为uk,位移加速度为Wk,则卡尔曼滤波方程为:
(11)
其中△tk=tk-tk-1,式中,I为单位矩阵,当其为一维向量时I=1。本文取初始参数Qk=1,Rk=1,初始状态向量X0=[2.06,0]T初始估计误差协方差阵为P0=[0.01,0;0,0.001],利用Matlab编程[17]并执行卡尔曼滤波,计算结果如表2所示,单位为mm。


监测点CT3的预测效果精度评定表 表3

图1 CT3实测值与拟合预测值对比图

图2 CT3两种模型的残差曲线
4 结 论
(1)本文通过用卡尔曼滤波对原始沉降数据进行降噪处理,基于灰色模型建模机理,对降噪后的数据序列分别进行初始值和背景值的优化,建立优化的K-GM(1,1)模型,并与传统GM(1,1)模型进行对比分析,确定了优化的K-GM(1,1)模型应用于桥梁变形监测的可行性。
(2)结合工程实例分析,两种模型预测值与实测值的残差基本都在零附近波动,优化的K-GM(1,1)模型精度高于传统灰色模型,更具有动态变形的适应性,提高了桥梁变形预测与变形分析的可靠性。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
北京航空航天大学学报(2020年10期)2020-11-14
水电站设计(2020年4期)2020-07-16
自动化学报(2019年6期)2019-07-23
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
湖南畜牧兽医(2016年3期)2016-06-05
电测与仪表(2016年21期)2016-04-11