
基于证据理论的车辆微动特征识别技术
2019-02-13 00:43
雷达科学与技术 2019年6期
(中国航空工业集团公司雷华电子技术研究所, 江苏无锡 214063)
0 引言
雷达具备目标识别能力对准确判断敌方作战意图、制定正确作战方案、支持火控打击等作战环节十分重要,是高层次态势评估和威胁估计的主要依据。地面轮式车辆与履带式车辆往往承担不同的作战任务,具有不同的威胁程度,因此,对地面车辆目标进行分类识别具有重要意义。
运动目标微多普勒特征可以从窄带雷达回波中提取,能够反映出目标微动部件结构特征,是轮式/履带式车辆目标具有可区分性的本质特征[1],故基于微动特征的运动车辆目标识别引起了广泛关注。文献[2-3]利用不同方法对车辆回波频域信号进行分析,通过提取其频域微动特征实现了车辆目标分类。文献[4]提取了回波信号进行噪声抑制后的时频域特征,并利用SVM分类器完成了目标的分类识别。
在实际对运动目标进行跟踪识别时,受地杂波以及雷达视线等因素的影响,地面运动目标微多普勒特征很不稳定,给利用单一特征进行识别带来了难度。因此,采用多域特征融合识别的方法,降低不确定性带来的影响,提高识别性能[5]。DS证据理论利用两个或多个不相关的证据信息对辨识框架中的各命题进行独立判断,然后通过证据合成法则,将多个证据的判断结果融合起来,进而获得识别结果[6]。目前,基于证据理论的融合识别得到广泛应用,但仍存在如何得到基本概率赋值等问题[7-8]。本文提出了基于DS的地面运动目标多域特征融合识别方法,在提取地面运动目标回波微多普勒特征的基础上,融合频域与时频域微动特征,通过构建多层融合识别网络完成地面轮式/履带式车辆目标分类识别。该方法利用微动特征值构建网络基本概率赋值,充分利用多域微动特征,提高了识别性能。
1 地面运动目标微动特征提取
1.1 轮式/履带式车辆回波分析
地面目标微动部件相对于雷达视线的运动会产生微多普勒频率,能够反映目标微动部件结构特征。对轮式车辆,主要表现为车轮相对车身平动的转动,对履带式车辆,除了有车轮的转动外,还有上履带和下履带的平动产生的微动效应。通过对轮式/履带式车辆典型微动部件建模分析其微动特征[9]。

图1 地面目标微动结构示意图
如图1所示,得到目标微动部件模型。首先对于轮式车辆,假设车身速度与坐标系速度一致,将车轮看作散射点的叠加,对部件上任一散射点P,其回波信号为
s(t)=Aexp[jξsin(ωt+θ0)]
(1)
式中,A为散射点强度,ω为转动角频率,ξ=4πd0/λ,d0为转动半径,λ为雷达波长。
将式(1)用傅里叶级数展开得到:
(2)
式中,Jn(ξ)为第一类n阶贝塞尔函数。
则车轮的回波信号可以表示为

(3)
式中,K为车轮上散射点的个数。车轮转动的微动调制在频谱上表现为一系列的离散谱线,其幅度由散射点强度以及贝塞尔函数决定。
类似地,履带式车辆目标的回波信号可以表示为
s(t)=sAB(t)+sBC(t)+sCD(t)+sDA(t)=
(4)
由轮式与履带式车辆回波信号对比可知,相比于轮式车辆,履带式车辆具有明显的2v分量以及在0~2v之间的微多普勒分量,且由于材质原因,实测中轮式车辆微动效应不明显,因此,可以从微多普勒特征出发,提取具有可分性的分类特征。
1.2 多域微动特征提取
特征提取是基于微动特征的地面目标分类的重要步骤,由于时域信号受地面杂波干扰较大,信噪比较低,其回波特征不明显,故主要微动特征差异在频域或时频域中显现。
1) 频域特征提取
由上节分析可知,轮式/履带式车辆目标特征差异主要体现在2v分量及在0~2v之间的微多普勒分量,故在频域直观地对这两处差异进行特征提取。
频谱展宽特征 判断杂波谱与二倍谱之间是否存在频谱展宽特征。首先对地面目标回波数据进行傅里叶变换得到目标回波频谱S(f),确定地杂波谱线位置nc与目标谱线位置nt,计算得到目标二倍谱线位置nt2,然后提取出0~2fd之间除了杂波谱与目标谱之外的所有频点分量,并组成频谱展宽向量S0,获得当前环境下的平均噪声值N0,最后计算信噪比向量为
即为频谱展宽特征值。根据轮式/履带式车辆回波微动特性可知,履带式车辆具有明显的频谱展宽的特征,因此,其频谱展宽特征值向量中元素值应较大。
二倍谱特征 判断目标回波频谱是否存在2fd分量。分析得到频谱中二倍谱分量位置nt2,获得该处谱线幅值并与平均噪声幅值比较,计算得到:
即为二倍谱特征值。根据轮式/履带式车辆回波微动特性可知,履带式车辆在2fd处才会具备明显的频域突起特征,因此,其应具备较大的二倍谱特征值。
频域特征提取示意如图2所示。

图2 频域特征提取示意
2) 时频域特征提取
时频分析是一种描述信号的频率随时间变化的信号处理方法,它采用时间-频率联合来表征信号,通过在时频域分析信号,以实现全面观测信号特征的目的。短时傅里叶变换(STFT)是最常用的时频分析方法,其基本的思想是:用特定的窗函数截取信号,再采用傅里叶变换处理窗内的信号,以得到该信号在那该时刻的频率,沿着信号移动窗函数,就可以得到信号的频率随时间变化的情况。其表达式如下:

(5)
式中,w(t)为窗函数。
平均瞬时多普勒谱的熵 回波信号时频变换后再进行特征提取。一般而言,轮式车辆的时频图较为简单,只有一条明显的目标谱,而履带式车辆由于谐波分量较多,其时频图成分较为复杂。平均瞬时多普勒谱的熵计算方法为
(6)

2 DS多域特征融合识别
2.1 证据理论
运用证据理论进行地面运动目标融合识别[10],假设mi(un)为证据i分配给目标类型un的基本概率赋值,证据理论融合方法可以表示为
(7)
(8)
即能得到融合后的目标类型un的基本概率赋值,之后可根据判定规则进行模式判别。
2.2 基本概率赋值计算
基本概率赋值的确定是D-S证据理论需要解决的关键问题。本文对地面运动目标回波微动特征进行融合,通过提取的三类微动特征完成目标识别,故利用提取的特征进行变换获得融合基本概率赋值。对于本文的分类问题,辨识框架为Θ={∅,L1,L2,Ι},其中,L1代表轮式车辆,L2代表履带式车辆,mi(∅)=0,mi(Ι)=1。对提取的三类特征分别进行概率赋值如下。
m1(un)的表达式为
(9)
式中,num(·)表示向量中元素的个数,即认为在频域展宽向量中较大值的占比越大,则目标属于履带式车辆的概率赋值越大。
m2(un)的表达式为
(10)
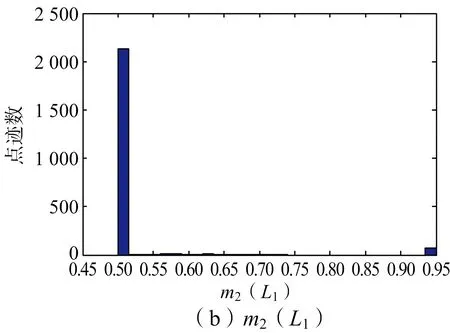
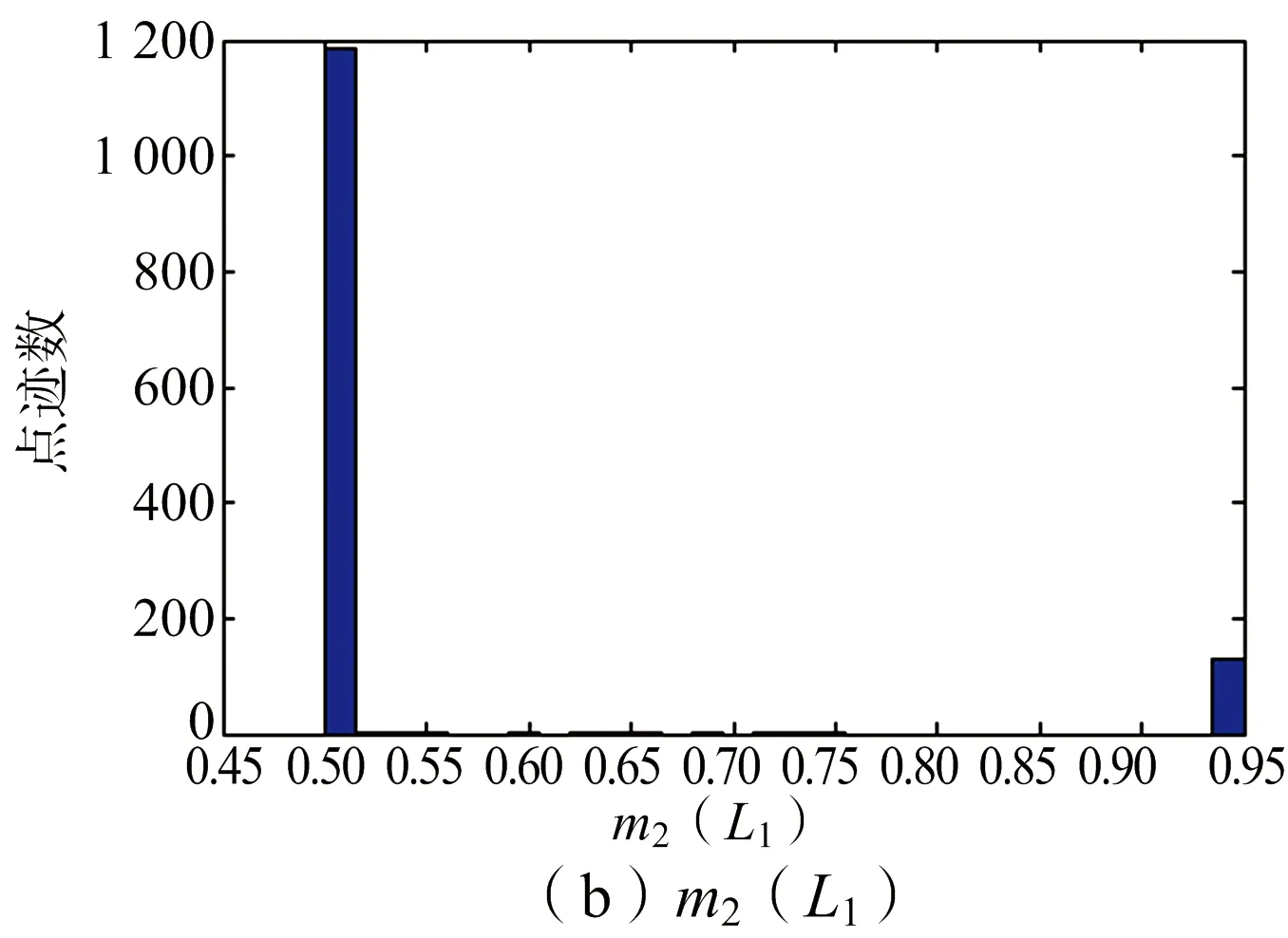
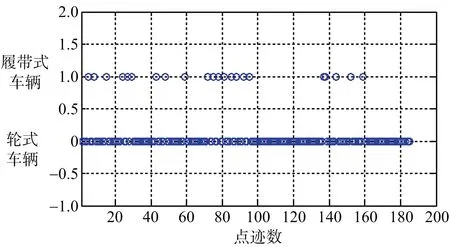
式中,η2max,η2min为设定的上下限,W2为设置的权重,保证0 m3(un)的表达式为 (11) 式中,η3为设定的门限,W31,W32为权重参数。由于履带式车辆包含的瞬时频率分量比轮式车辆多,因此平均瞬时频谱的熵较大。故在F3较大时,目标属于履带式车辆的概率赋值越大。 本文的地面运动目标识别是二分类问题,由于地杂波与雷达视线等的影响,在目标的运动航迹中,识别结果不稳定,故采用点迹特征融合与航迹结果判定的方法,给出目标的识别结果,其判定方法为: 1) 对点迹识别结果,判定的目标类型m(un0)必须为最大值且大于设定的门限,即 m(un0)=max(m(un)),m(un0)>η 2) 对目标连续跟踪一定数量的点迹后,才进行识别结果的输出。 3) 航迹的识别结果为当前具有最大识别率的目标类型。 运用证据理论的目标融合识别基本架构如图3所示。 图3 融合识别框图 其基本步骤如下: Step1 首先计算回波信号频域微多普勒特征,并转换成识别框架的基本概率赋值。 Step2 利用D-S证据理论对频域提取的两类特征进行融合,获得频域特征提取识别后的基本概率赋值。 Step3 提取回波信号时频域微动特征,并转换成基本概率赋值。 Step4 再次利用证据理论对频域与时频域得到的结果进行融合,通过对输出的基本概率赋值分析得到当前点迹的识别结果。 Step5 利用航迹识别结果的判定方法得到当前航迹的目标类型。 本文采用雷达实测数据验证算法的有效性,将测试目标分为轮式车辆和履带式车辆,回波数据样本录取于不同的时间段。 图4、图5给出了典型的轮式车辆与履带式车辆目标的回波信号在频域与时频域的表现形式。从图中可以看出,与理论分析一致,相比于轮式车辆,履带式车辆的谱线特征更为明显,且有明显的二倍谱特征,表现在时频域上轮式车辆具有明显的杂波谱和目标谱,而履带式车辆除了几条明显的谱线外,还有许多其他的谱线分量,使得能量较为分散。 图4 回波频域信号 图5 回波时频域信号 分别对两类目标的回波信号进行特征提取,图6、图7给出了两类目标频域特征的基本概率赋值数据分布。 图6 轮式车辆微动特征数据分布 图7 履带式车辆微动特征数据分布 对实验结果进行分析:从m1(L1)结果可以看出,对轮式车辆和履带式车辆,从频域展宽特征提取到的基本概率赋值差异明显,对轮式车辆,m1(L1)值较大,代表其为轮式车辆的概率较高,对履带式车辆,m1(L1)值较小,代表其为轮式车辆的概率较低,符合预期结果。 从m2(L1)计算得到的数据分布可以看出,受门限设置影响,大部分特征结果为m2(L1)=0.5,代表二倍谱特征不明显,对融合结果无影响。对数据进行统计,轮式车辆该值的占比远大于履带式车辆,符合理论预期。 对时频域信号进行特征提取,平均瞬时多普勒的熵均值如表1所示。与理论分析一致,履带式车辆包含的瞬时频率分量比轮式车辆多,因此平均瞬时频谱的熵较大,具有一定的可区分性。 表1 时频域特征仿真结果 根据识别框架完成地面运动目标识别算法试验,首先对任意一条航迹进行实验分析,其各个点迹的识别结果如图8所示,该航迹目标为履带式车辆。 (a) 频域特征识别结果 (c) 融合识别结果图8 点迹识别结果 对识别结果进行统计,频域识别结果正确率为11.89%,时频域识别结果正确率为52.43%,利用基于证据理论的识别框架后,此段航迹中目标被识别为履带式车辆的点迹占比为73.37%,大于简单的将频域与时频域识别率累加的结果。由于视线遮挡等原因,部分点迹未能探测到微动特征导致识别率仍然偏低,且点迹识别结果不稳定,故再利用航迹判别方法,得到的航迹识别结果如图9所示,可见当点迹数累计到一定的数量后,识别系统能够对目标正确且稳定的识别。 图9 航迹识别结果 采用多条航迹进行实验,统计识别结果如表2所示。分别对轮式车辆和履带式车辆航迹结果进行统计,由识别结果可以看出,本文的方法可以对运动目标进行稳定而准确的识别。 表2 航迹识别结果统计 微动特征是实现地面运动轮式/履带式车辆目标分类的重要依据,但是使用单一特征识别率低且不稳定,本文研究了基于证据理论的地面运动目标多域特征融合识别,融合频域与时频域微动特征实现目标分类。首先,通过微动建模分析了两类目标在多普勒域上的差异性,提取了回波频谱展宽、二倍谱以及平均瞬时多普勒谱的熵三类特征,并转换成目标类型基本概率赋值;然后利用证据理论的融合方法得到基于两种频域特征的融合识别结果,接着对频域与时频域识别结果进行决策级证据理论融合,得到当前点迹的目标类型,最后根据航迹判别规则完成航迹目标的分类。实测数据试验结果验证了本文方法的有效性。2.3 识别结果判定
2.4 识别框架

3 仿真验证
3.1 回波分析


3.2 特征分析



3.3 性能试验



4 结束语
猜你喜欢
失效分析与预防(2022年3期)2022-11-18
科学与财富(2021年34期)2021-05-10
军民两用技术与产品(2021年10期)2021-03-16
北京航空航天大学学报(2020年10期)2020-11-14
科普童话·百科探秘(2019年5期)2019-08-27
计算机应用文摘·触控(2019年9期)2019-07-07
中学生数理化·高一版(2017年1期)2017-04-25
现代兵器(2017年1期)2017-02-13
中学生理科应试(2016年7期)2016-05-14
理科考试研究·高中(2016年9期)2016-05-14
