
基于安全性评价的城市离散交通网络设计方法*
2019-01-21 11:50林宏志余菲菲
交通信息与安全 2018年6期
林宏志 余菲菲
(1.东南大学经济管理学院 南京 211189;2.河海大学商学院 南京 211100)
0 引 言
传统的交通安全研究是在道路系统建成后,通过对大量事故数据的统计分析识别危险路段和事故黑点,然后提出相应的改善措施[1-2]。由于此时可以采取的措施非常有限,交通安全治理的效果往往并不显著,并且不能从根本上提高道路系统的安全水平。从20世纪90年代开始,一些发达国家开始启动公路主动安全评价工作,将安全评价提前到道路设计阶段,要求道路设计符合安全性能要求,以避免或减少交通事故的发生。这种做法改变了传统的事后补救型的交通安全治理,至今已经积累了大量成功的经验,形成了较多的道路设计规范。我国交通运输部在吸收国内外相关研究成果和实践经验的基础上,于2015年12月颁布了《公路项目安全性评价规范》[3],要求自2016年4月起对道路设计进行安全性评价。然而,即使在道路的具体设计细节上考虑了安全性因素,也不能从根本上改善道路网络的安全水平,许多引发交通安全问题的根源,如交通的产生和吸引、土地的利用、道路网络的布局等都不是一条或几条道路的设计改善所能解决的[4]。事实上,交通安全受交通系统规划、设计、建设、运营各个阶段的影响,考虑到交通规划对塑造交通系统的深刻影响,在交通规划阶段就应该高度重视交通安全性评价,即是新兴的交通安全规划。
交通安全规划理念已取得业界和学术界的高度重视,并成为下一代道路安全战略。2005年美国通过的《安全、负责、灵活、高效的交通平等法案》强制要求“各类交通规划部门将安全水平全面考虑进交通规划的每个步骤中”。2006年王岩和杨晓光[5]在国内首次明确提出了主动交通安全规划这一概念,建议在交通规划中主动考虑安全性评价。2014年黄合来等[6]在系统总结美国交通安全规划的研究热点及技术难点的基础上指出,交通安全规划理论是当前国际道路交通业界和学界最为前沿的研究方向之一,有望带来传统交通规划方法的革新。2017年Haas和Bekhor[7]提出在交通网络设计阶段,不但要考虑系统的总出行时间最小化,而且要考虑安全水平最大化。
目前国内外对道路安全性评价方法研究较多,常用的典型定量安全评价方法主要有:设计一致性评价、事故预测模型、交通冲突等。其中,设计一致性评价属于事前主动安全评价,而事故预测模型和交通冲突都属于事后被动安全评价。设计一致性评价指标又通常分为3类:基于运行速度协调性的评价指标、基于道路几何线形的评价指标和基于驾驶员工作负荷的评价指标。当前国内外道路主动安全评价分析时,普遍采用运行速度协调性来检验道路几何线形设计的一致性[8]。基于速度协调性的交通安全评价就是以速度为媒介,认为速度及其波动性与交通事故密切相关,把速度当作交通安全的替代指标,通过观测路段的运行速度进行交通安全评价。一般来说,运行速度协调性有以下2个含义:①同一路段实际行驶速度与设计速度相一致;②相邻路段实际行驶速度相一致。
本文将交通安全评价提前到道路网络规划阶段,采用同一路段实际行驶速度与设计速度的一致性作为道路网络安全评价的指标,以从源头上减少交通事故的发生。本文建立了城市离散交通网络设计的双层规划模型,以实际行驶速度与设计速度的均方误差最小为上层政策目标,以用户均衡作为下层的行为反应,并设计了求解算法。最后,采用交通网络分析中常用的Nguyen-Dupuis网络测试了该方法的有效性。
1 研究方法
1.1 城市离散交通网络设计模型
交通网络设计问题是一个考虑使用者路径选择行为,并且在给定的各种约束条件下,选择改建或者新建的路段,从而使得交通网络某种性能最优化的问题。这个问题是交通规划领域研究的重点和难点问题,十分具有挑战,引起了许多学者的研究兴趣。一般来说,交通网络设计问题属于典型的领导者-跟随者的双层规划问题,其上层问题为交通网络的某种性能最优化,下层问题通常为用户平衡问题。根据政策工具的不同,交通网络设计问题又分为离散交通网络设计、连续交通网络设计问题和混合交通网络设计问题。其中,离散交通网络设计一般指在投入资金预算的情况下,采用定量方法研究在现有路网上新建某些路段以使系统的某种性能达到最优的问题,属于交通规划的方案设计部分。
学者从不同的性能表现对离散交通网络设计问题进行了研究。最为常见的是系统总出行时间[9-10]。近年来,可持续发展的理念深入人心,一些可持续发展的指标也被相继提出,比如交通网络的备用能力[11-12]、环境污染[13-14]、可靠性[15-16]、可达性[17-18]等。然而,尽管交通安全问题广受关注,但尚未见到以网络安全性能为目标的交通网络设计研究。
本文采用城市交通网络中各路段实际行驶速度与相应设计速度的均方误差作为网络安全水平的替代指标,该均方误差越小网络安全水平越高,此时驾驶员面临最适宜的道路行驶环境,有利于减少交通事故的发生。因此,交通网络规划的政策目标就是路段行驶速度与设计速度的均方误差最小化,即
(1)

(2)
式中:α和β为阻滞系数,在美国公路局交通流分配程序中,取值分别为α=0.15和β=4,也可以由实际数据回归分析求得;ca为路段a的通行能力。因此,式(1)转化为
(3)
不同于事后评价式的被动交通安全,主动交通安全规划需要预测不同网络设计下路段的运行速度va。本文采用Wardrop用户均衡原理作为网络用户对不同政策的行为反应,建立了一个双层规划模型用于城市离散交通网络设计,其上层为行驶速度与设计速度的均方误差最小化,下层为用户平衡模型。上层决策变量为ya,表示是否修建某条候选路段a,为0-1变量,a∈A, 所有的候选路段构成0-1决策向量y。上层决定新建道路方案后,下层形成平衡状态网络流xa,也就是说路段流量xa是决策向量y的函数,表示为xa(y)。另外,道路网的规划受到资本的约束。假设单位长度的路段修建成本为ua, 则长度为la的路段修建成本为uala。因此,双层规划问题表示为
(4)
(5)
其中尚未定义的变量和参数如下。
A为候选建设的路段集合。
B为新建道路的资金约束。
xa为路段a上的交通流量。

ca为路段a的实际通行能力,即单位时间内路段实际可通过的车辆数。
ta(xa,ca)为路段a以交通流量为自变量的阻抗函数,也称为行驶时间函数。


qrs为出发地r和目的地s之间的OD交通需求量。
1.2 求解算法
城市离散交通网络设计问题实际上是一个非线性整数双层规划问题,求解起来十分困难,被认为是交通研究中最具有挑战性的问题之一[19]。学者们提出了很多方法,主要有枚举法、遗传算法、模拟退火法等。本文采用的求解算法,其上层采用枚举法,下层采用Frank-Wolfe算法。算法的基本思路是对上层满足约束的可行方案计算下层平衡网络流量和路段速度,再根据路段速度计算上层的目标函数,比较所有可行的方案,最后确定最优的方案。详细的求解算法可以归纳如下。
步骤1:生成一个可行的建设方案。判断方案是否满足上层约束,如果不满足则采用下一个新的方案,直到得到一个可行的建设方案y,令m=1。



步骤5:确定迭代步长。求满足下式的λ



步骤9:确定最优的设计方案。当所有可行方案计算完毕后,停止计算,从所有可行方案中寻找上层目标函数最优的设计方案。
求解算法的流程图如图1所示。

图1 求解算法流程图Fig.1 Iterative optimization algorithm flow chart
2 算例分析
本文采用交通网络分析中常用的Nguyen-Dupuis网络(见图2)作为测试网络。道路参数列在表1中,其中编号20~24的虚线段为候选的路段。为简化计算,本例假设政策制定者要求从5条候选道路中选择2条进行开工建设,原有各路段的设计速度都为30 km/h,新建各路段的设计速度都为40 km/h。交通需求矩阵如表2所示。假设候选路段的结合为A,则该算例的双层规划模型简化为
(6)
(7)

图2 Nguyen-Dupuis测试网络(虚线段为候选建设路段)Fig.2 Nguyen-Dupuis network where dashed roads are alternatives
对所有可行方案进行交通流平衡分配后,可以得到该方案下各路段的行驶速度、交通流量和通行时间,进而可得行驶速度与设计速度的均方误差以及系统的总出行时间(表3)。从图3可以看出,不同方案下,均方误差相差较大,最大为修建路径23和24(方案10),速度均方误差为48.77,最小为修建路径20与24(方案4),速度均方误差为28.96。然而,安全的交通网络设计会损失一定的出行效率,最安全的交通网络,出行效率不一定最高。从图4的系统总出行时间看,方案7(修建路径21和24)的出行效率最高。令人鼓舞的是,最安全的方案4在出行效率方面是次高的。尽管以交通安全为导向的交通网络设计会损失一定的效率,但在交通效率方面的表现令人满意。因此,为了设计安全和高效的交通网络,应该修建路径20与24。由此可见,在交通规划阶段应该主动考虑安全性评价,不但可以从源头上减少交通事故的频发状况,而且可以保证交通网络的出行效率。
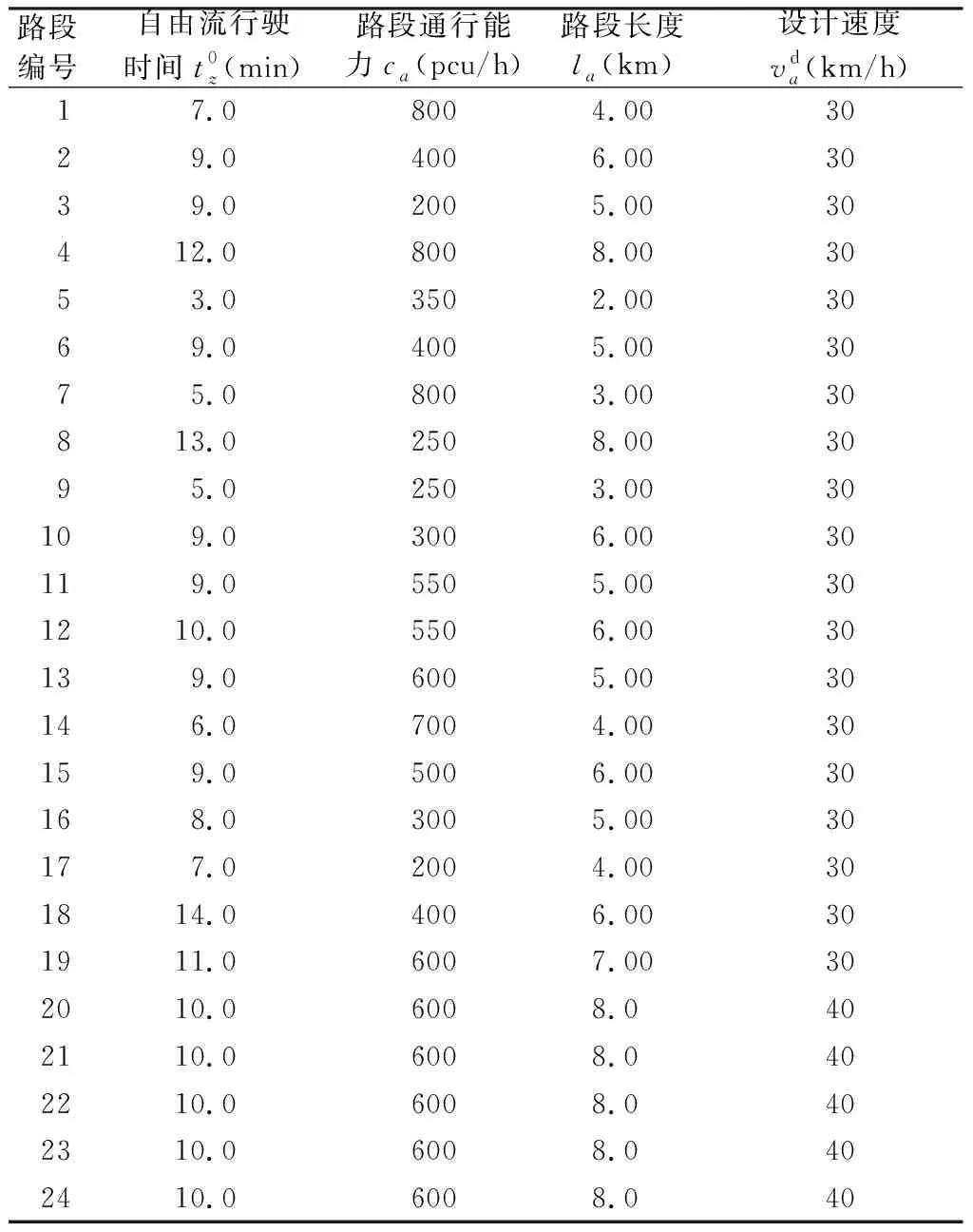
表1 Nguyen-Dupuis网络的路段参数Tab.1 Parameters for Nguyen-Dupuis network

表2 Nguyen-Dupuis网络的OD对交通需求Tab.2 OD demands of Nguyen-Dupuis network

表3 不同方案下道路网络的性能表现Tab.3 Road network performances for different plans

图3 不同方案下道路网络的速度均方误差Fig.3 Mean-squared errors of speeds for different plans

图4 不同方案下道路网络的总出行时间Fig.4 Total system travel time of speeds for different plans
3 结束语
传统的交通安全研究主要是基于事故数据对已建成的道路设施或交通参与者进行分析,从而针对事故多发路段和事故黑点采取补救措施。由于此时可以采取的措施非常有限, 因此交通安全治理不可避免地局限于微观的道路设施而收效甚微,不能从根源上减少交通事故的发生,不能从根本上提高交通网络的安全水平。事实上, 交通安全状况与交通的规划、建设和运营等一系列过程密切相关。考虑到交通规划对塑造交通系统的深刻影响,有必要在规划阶段就对交通网络的安全水平作前瞻性、全局性考虑,将安全性评价融入到现有交通规划中,以实现整个交通网络效率和安全的有机整合。
本文将交通安全评价提前到交通网络规划阶段,以行驶速度与设计速度的均方误差作为网络安全水平的替代指标,以网络安全作为政策目标,以用户均衡作为政策反应,建立了城市离散交通网络设计的双层模型并在Nguyen-Dupuis网络上进行了测试,测试结果显示了该方法的有效性。该方法具有4大关键特征:①主动性。主动安全是交通安全规划的本质特征,本文将交通安全评价提前到道路网络规划阶段。②系统性。本文考虑整个交通系统的安全性,而非单一路段或事故黑点。③科学性。本文的路段速度预测采用了广泛接受的Wardrop用户均衡原理,并且对整个交通系统的安全水平进行了量化评价。④可操作性。研究发现,以交通安全为导向的交通网络设计可以设计出安全和高效的交通网络。
本文仍然存在一些问题和不足,有待进一步研究。首先,采用运行速度与设计速度的均方差作为交通安全性评价,虽然容易操作但仍显粗糙。事实上,影响交通安全的因素有很多,可以考虑更为真实的交通安全性能函数。其次,测试网络较为简单,采用枚举法就可以找到最优解,虽然适用于战略交通网络设计,但对于更为复杂的路网,算法效率较低,可以考虑遗传算法和模拟退火法等启发式算法。
猜你喜欢
数学杂志(2022年4期)2022-09-27
工会博览(2022年5期)2022-06-30
科技风(2021年19期)2021-09-07
今日中国·法文版(2020年7期)2020-07-04
军事运筹与系统工程(2019年1期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
汽车文摘(2017年1期)2017-12-05
