
基于电静液作动原理的主动式踝关节假肢设计
2019-01-14 06:57,,,,
液压与气动 2019年1期
,,, ,
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
引言
从20世纪开始,世界范围内逐渐开展了人体各部位假肢的研究,用于弥补残疾人运动功能缺陷的踝关节假肢也经历了从功能单一到功能繁多的转变,取得了相当显著的成果。截至目前,踝关节假肢可以分为被动式踝关节假肢、半主动式踝关节假肢和主动式踝关节假肢。
被动式踝关节假肢经过长期的发展已经非常成熟,其在被动背屈阶段储存能量并在主动跖屈阶段将能量释放[1],且成本低廉,坚固耐用,但是远远不能提供生物踝关节所能提供的力矩和功率[2-4]。
半主动式踝关节假肢在支撑相并不能提供净正功,其在支撑相的本质仍然是被动踝关节假肢,但是可以调节阻力矩或者可以在摆动相调节角度。在21世纪初,日本的假肢研究组织研究并设计了一种半主动式踝关节假肢,该假肢使用磁流变液来提供阻尼以改善假肢的行走性能,但并不能提供主动的驱动力[5]。 Elan Foot使用可变阻尼的液压假肢提供平稳的运动,以改善用户的行走体验,奥索设计的Proprio Foot[6]是一种可以实现自动角度控制的假肢。该假肢具有用于在摆动相调节脚踝的角度的电动机,它在站立相时,通过液压缸为人体行走提供被动阻尼。
主动式踝关节假肢在站立相的净功为正,主要有以下几种驱动方式,包括柔性绳驱[7]、气动驱动[8]、气动人造肌肉驱动[9]、滚珠丝杠驱动[10-11]和液压驱动[12]。最成功的电动踝关节假肢之一是由MIT[13]设计的弹性储能脚踝。当脚踝做负功时,它主要用弹簧吸收能量。而在主动跖屈阶段用电机和弹簧共同驱动人体。巴斯大学的实验室研究了液压驱动的主动式踝关节假肢[12],它使用2个节流阀来调整被动状态下的脚踝阻尼扭矩,而在主动状态下,液压泵通过液压缸向踝关节输送能量,为人体的前进提供动力。
踝关节假肢对峰值功率和输出转矩的要求比较高,相反,对占其工作周期大部分时间的平时功率的要求极低。这就产生了驱动装置满足了峰值功率的要求就难以满足对重量和续航的要求,满足了续航的要求就难以提供足够的峰值功率的矛盾。本研究首先分析了人的生物脚踝正常走路时的力学特征,进而利用所得到的相关信息设计了新式的踝关节假肢的机械机构,最后对假肢的整体的力学性能和液压系统的功能进行了仿真。
1 假肢性能需求分析和驱动方案选择
1.1 人体运动学分析
人体行走的步态周期可以被分为两个阶段:站立阶段和摆动阶段。站立阶段是指人脚的其中一部分接触地面(脚跟、脚掌或者脚尖)的阶段,占据全部行走周期时长的60%;而摆动阶段是指人脚在空中摆动,迈向前方的过程,占据全部行走周期总时长的40%。摆动阶段中人脚整体不接触地面,因此,此时踝关节和小腿不需要对外做功;而站立阶段始终与地面进行接触,踝关节会起到支撑身体重量以及推动人体向前的作用。根据脚踝作动方向和作动方式的不同,可以将站立阶段划分成以下4个子周期阶段:
SW(SWing):踝关节主要发生主动背屈,调节踝关节角度,为站立相做准备,在此过程中输出力矩较小,对应图1中g-l。
HS(Heel Strike):踝关节主要发生被动跖屈,踝关节做负功,吸收人体重心下落带来的冲击,此过程中的输出力矩较小,对应图1中a-c。
MS(Middle Stance):踝关节主要发生被动背屈,此时踝关节做负功,作用形式表现为提供阻力,此过程中的输出力矩较大。对应图1中c-d。
TS(Terminal Stance):踝关节主要发生主动跖屈,推动人体前进,此时踝关节做正功且瞬时功率很高,输出力矩较大。对应图1中d-f。
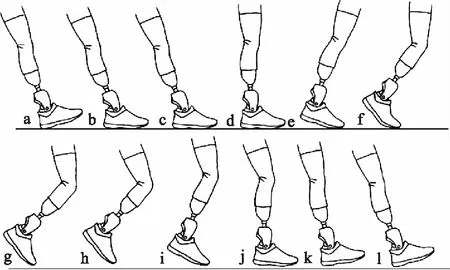
图1 正常人体踝关节步态周期
1.2 输出转矩和输出功率分析
图2显示了一个健康的人在平地上行走时踝关节输出功率的变化,其中灰色区域显示了脚趾离开地面的过程,图2中的曲线是被动工作阶段脚踝功率的变化。从图2中可以看出,踝关节输出较高功率的时间仅占整个周期的20%,且最大功率达到2.7 W/kg。而在其他时间,输出功率小于峰值功率的10%,这使得踝关节假肢对驱动机构的输出功率有很高的要求。由于大部分时间驱动机构的输出功率很小,这为驱动机构的设计带来了极大的挑战。
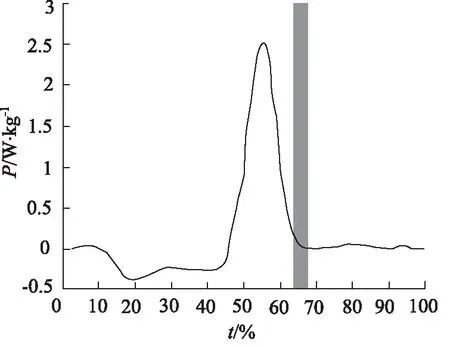
图2 平地行走时正常人体踝关节输出功率曲线
图3曲线表示健康人体在平坦地面行走时踝关节的扭矩变化,灰色矩形表示趾部离开地面的时间。峰值输出扭矩为1.58 N·m/kg,而扭矩输出主要集中在MS阶段和TS阶段,且在MS阶段随周期推移力矩逐渐上升,而在TS阶段,输出力矩呈下降趋势。
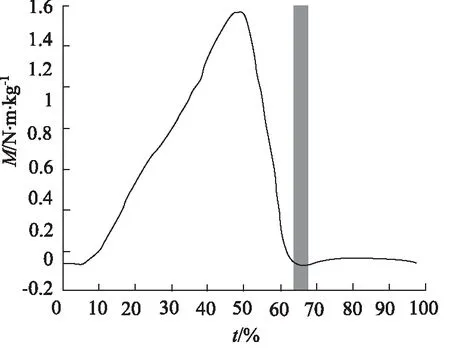
图3 平地行走时正常人体踝关节输出转矩曲线
1.3 驱动方案选择
对于带有驱动的踝关节假肢,国内外的学者已经使用了不同种类的作动器作为踝关节假肢的驱动机构,包括人造气动肌肉[9]、直流电机加丝杠传动[10-11]以及液压作动器[12]等。主动式踝关节假肢需要在一定的重量和体积限制下,达到人正常行走的运动学和动力学指标,因此假肢的驱动机构需要具有较高的能量密度,能输出较大的驱动转矩并且能够吸收脚跟着地时所带来的冲击力。
此外踝关节假肢对峰值功率和输出转矩的要求比较高,相反,对占其工作周期大部分时间的平时功率的要求极低,这就产生了驱动装置满足了峰值功率的要求就难以满足对重量和续航的要求,满足了续航的要求就难以提供足够的峰值功率的矛盾。
为了解决上述问题,本研究基于(Electro-Hydrostatic Actuator,EHA)原理设计主动式踝关节假肢,在系统中加入蓄能器进行能量储存,并在需要的时间释放,解决假肢瞬时功率需求高而平时功率需求低的矛盾,使液压泵可以一直运行在低功率的工作模式,降低对系统安装功率的需求;充分利用EHA作动器输出力比大的优势,减轻机体重量的同时,为人体提供充足的助力;在支撑相利用液压缸为人体的行走提供被动阻尼,利用液压阻尼实现柔顺的行走步态,并实现对冲击力的缓冲,减少行走过程中对膝关节的冲击。
2 液压假肢系统的设计
2.1 假肢液压系统的设计
基于EHA的主动式踝关节假肢需要一种结构合理、功耗低、工作性能好的液压驱动系统,该液压系统需要能输出足够的峰值功率以满足正常的行走需求,同时能有较低的功耗以满足对续航的要求,所设计的液压回路如图4所示。根据人体步行时踝关节的步态周期特性,将液压回路的工作状态分成被动跖屈状态(HS阶段)、被动背屈状态(MS阶段)、主动跖屈状态(TS阶段)和主动背屈状态(SW阶段)。
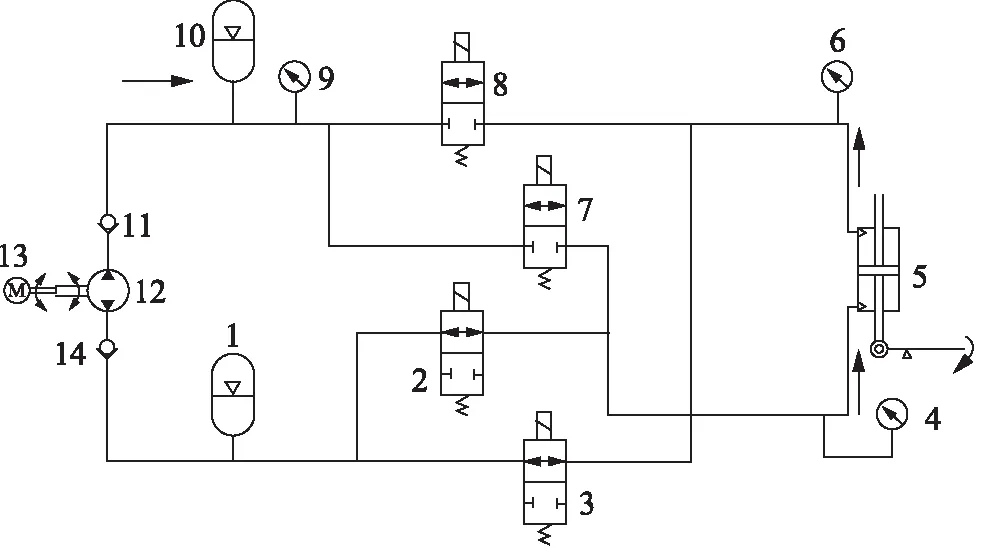
1、10.蓄能器 2、3.电磁常开阀 4、6、9.压力传感器 5.液压缸 7、8.电磁常闭阀 11、14.单向阀 12.液压泵 13.电机图4 主动式踝关节假肢液压原理图
在HS阶段,踝关节假肢切换至被动跖屈状态。此时阀2和阀3打开,阀7和阀8关闭,双出杆缸的上下两腔通过2个电磁常开阀导通,油液从液压缸上腔流往液压缸下腔,通过液压油流动的阻尼作用使假肢可以吸收触地冲击,踝关节假肢主要做被动跖屈运动。与此同时,有刷直流电机和双柱塞泵向蓄能器中充能。
在MS阶段,踝关节假肢切换至被动背屈状态。此时阀2和阀3打开,阀7和阀8关闭,双出杆缸上下两腔通过2个电磁常开阀导通,油液从液压缸下腔流往液压缸上腔,液压系统通过液压油的流动为人体的支撑和运动提供阻尼。在此状态中,双柱塞液压泵持续向蓄能器中充能,将蓄能器压力提升至目标值。
在TS阶段,踝关节假肢切换至主动跖屈状态。由图2的踝关节能量曲线可知,此时踝关节假肢需要较大的扭矩输出,因而此时阀7和阀3打开,阀2和阀8关闭,泵源和蓄能器同时向双出杆缸的下腔做功,蓄能器在之前阶段蓄积的能量迅速释放,从而满足该主动阶段的功率要求。
在SW阶段,踝关节假肢切换至主动背屈状态。此时阀8和阀2打开,阀7和阀3关闭,双柱塞泵向作动缸上腔提供能量,迅速将踝关节假肢的关节角度恢复至初始状态,为下一阶段做准备。
该液压回路通过马达不停止的工作以及蓄能器的储能,减少了对马达峰值功率的要求,提高了续航能力。蓄能器可以提供足够的瞬时功率输出,可以满足人体对于假肢性能的需求,解决了以往输出功率和续航能力之间的矛盾。
根据上述要求,对元件选择如表1所示。
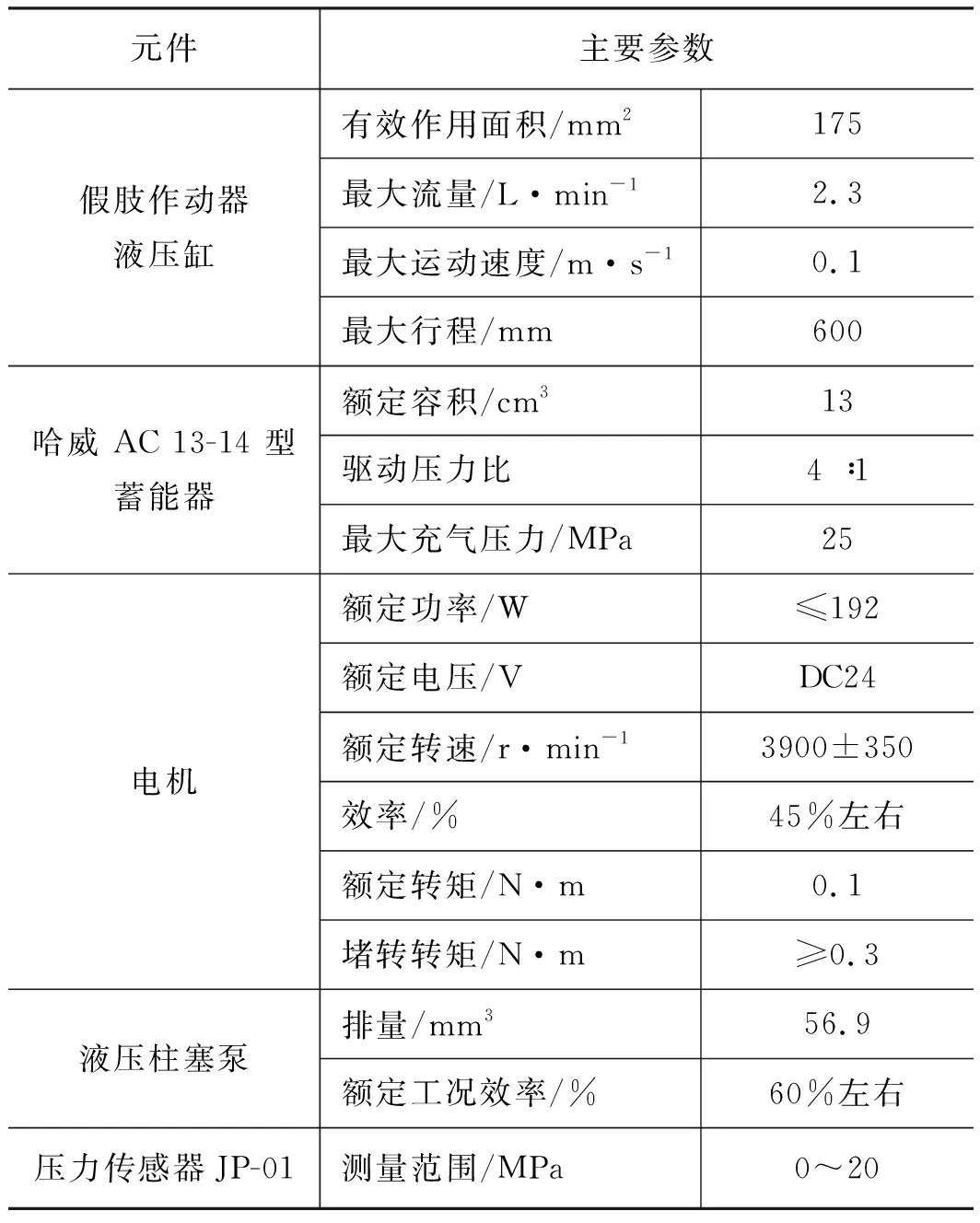
表1 基于EHA的主动式踝关节假肢的元件参数
2.2 假肢机械结构的设计
在主体的内部,直接通过打孔和铆压的方式形成所有液压回路,这使我们的假肢不包含任何外置液压管路。此外,还通过铆压单向阀以及嵌入柱塞的方式,在主体内部直接安置了包含2个微型柱塞的柱塞泵。而4个电磁阀的阀体部分也是通过铆压的方式安装在主体上的。不采用外置管路、直接将泵设计在主体中以及大量的采用铆压工艺,使得假肢的耐压能力、防泄漏能力、以及空间的利用率都得到了显著的提升。这为假肢的输出能力、可靠性、微型化提供了极大的帮助。
蓄能器、压力传感器、碳纤维脚板、电机、液压缸都通过螺纹的方式紧固在主体上。其中液压缸采用板连接的方式,避免了外置液压管路的出现。液压缸的出杆通过铰链与脚板的后部相连,这与人类跟腱部位的连接相类似。
所设计的主动式踝关节假肢如图5所示。
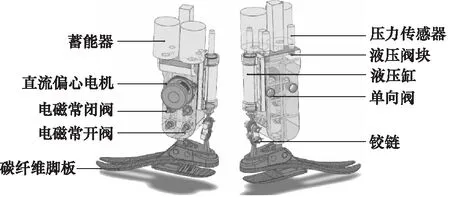
图5 主动式踝关节假肢整体设计
3 液压假肢系统的仿真
3.1 假肢综合力学性能的仿真
由于液压阀体是液压踝关节假肢最主要的部分,因此需要保证假肢在运动过程和静止站立过程受到的挤压变形不会导致液压回路内部结构被破坏,或者产生泄漏,因此先对液压假肢阀块进行单独的分析。
选择腿部阀块的材料为铝合金锻件,对材料施加约束,对应人体静止站立状态,模拟实际情况对假肢上端固定面的4个斜面和顶面进行固定。
由于阀块受力是地面的支持力通过底部的M12螺栓传递到阀块螺纹处的,因此对底部螺纹进行轴向加载。由于本踝关节假肢的设定工况是用于75 kg人体的正常行走,因此将加载力设置为单脚站立时的极限工况,加载力的大小设置为750 N。
得到应力仿真和位移仿真结果如图6和图7所示。通过仿真实验结果可得整体阀块应力分布范围为2.689e-1N/m2至7.662e6N/m2,整体阀块无应力集中现象。位移范围在0.000至5.540e-3mm,在允许的形变范围之内,验证了阀块的设计符合要求。
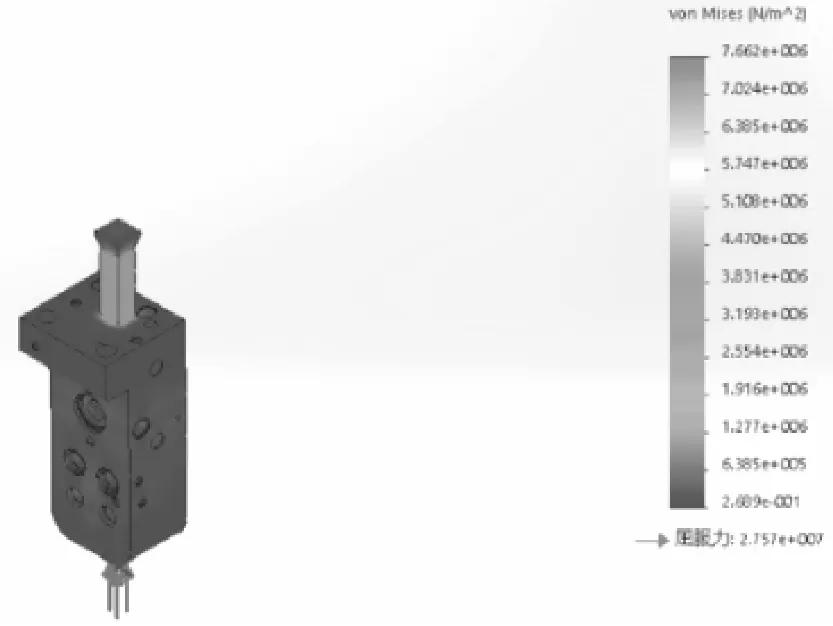
图6 液压主体阀块静态加载应力分布仿真结果
3.2 液压系统性能的仿真
根据设计的微型液压回路进行AMESim建模。按照表1所述元件参数进行参数设定,系统总体重量为3.5 kg,最后构成的仿真模型图如图8所示。
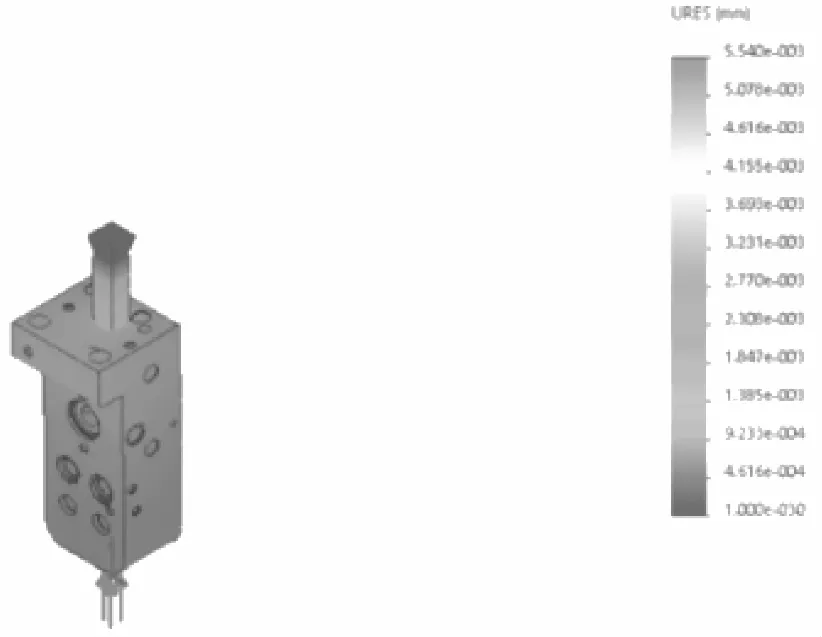
图7 液压主体阀块型变量仿真结果
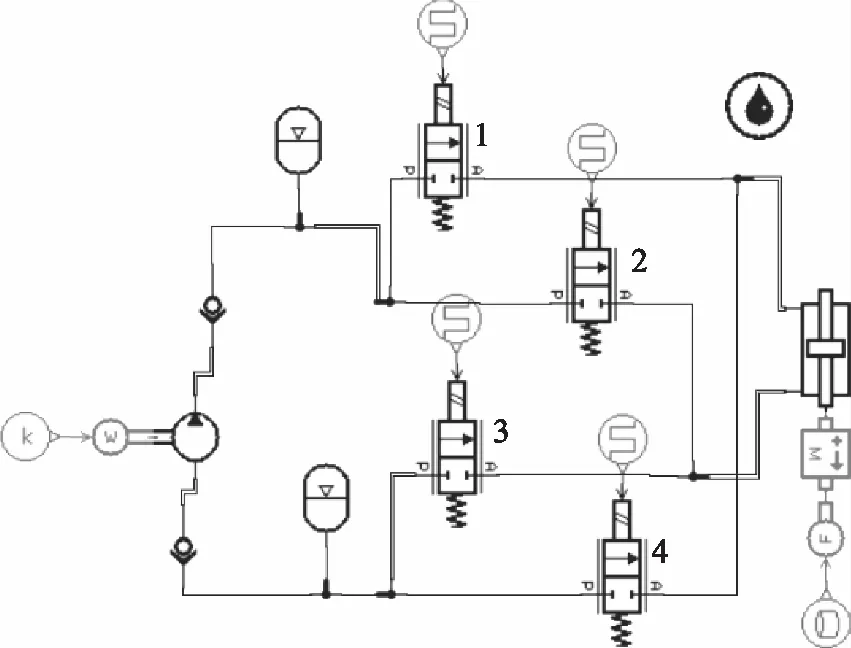
图8 AMESim微型液压驱动回路实际建模图
加载在双出杆液压缸的负载力通过Riener R等[14]测得的踝关节扭矩并进行拟合,如图9所示,拟合并输入到系统的图像见图10。图11为Riener R等[14]对同一状态下踝关节角度变化的测量曲线。
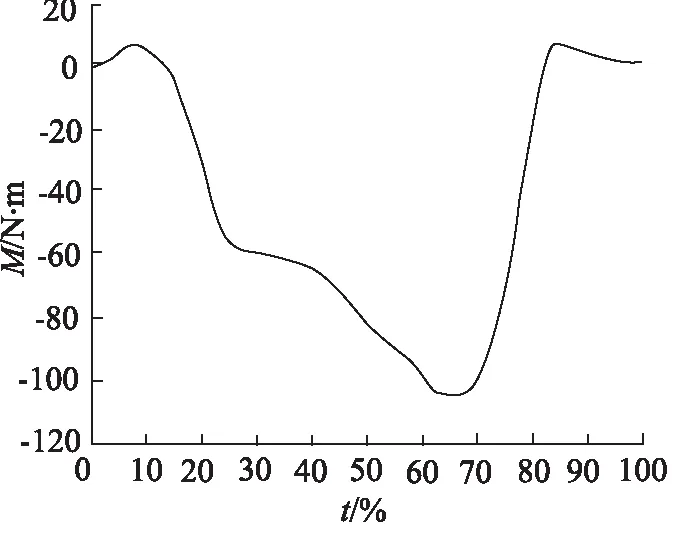
图9 踝关节力矩图
将图12与图11进行对比,可见此液压缸输出的位移基本符合踝关节角度的变化趋势。但由于系统中存在沿程阻力,导致在0.15 s中的主动蹬腿的位移14 mm 比当时设计的15 mm略小。在主动收腿环节的6.8 mm的位移比当时设计的10 mm略小。但已经能完成整个步态过程。在行走过程中由于液压系统阻尼的存在,该假肢可以提供合适的阻尼来吸收冲击提供阻力。
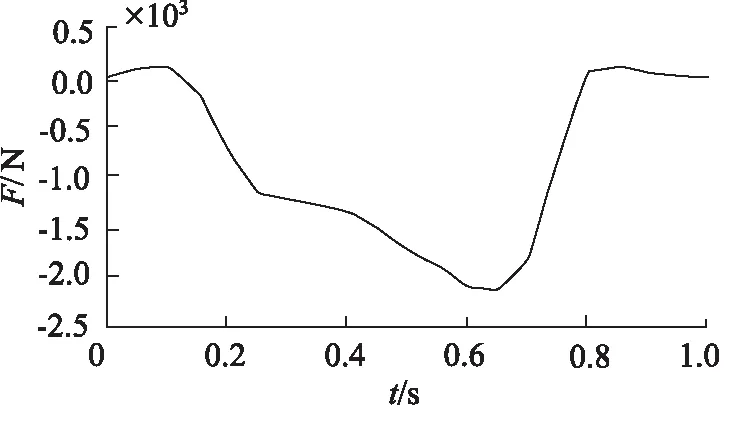
图10 仿真中的踝关节输入力
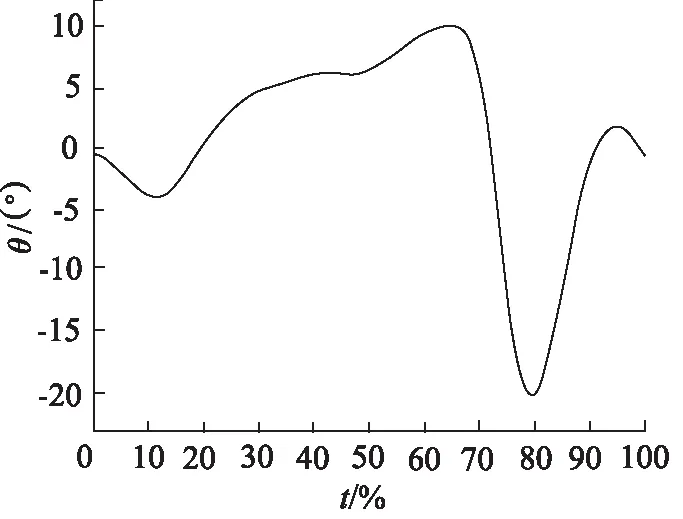
图11 踝关节角度图
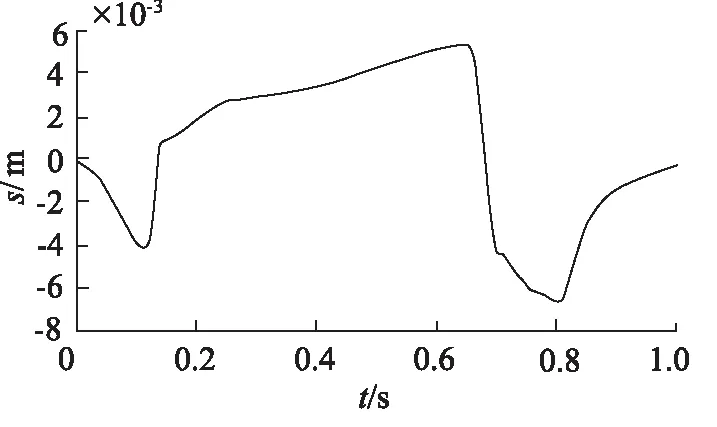
图12 液压缸输出位移
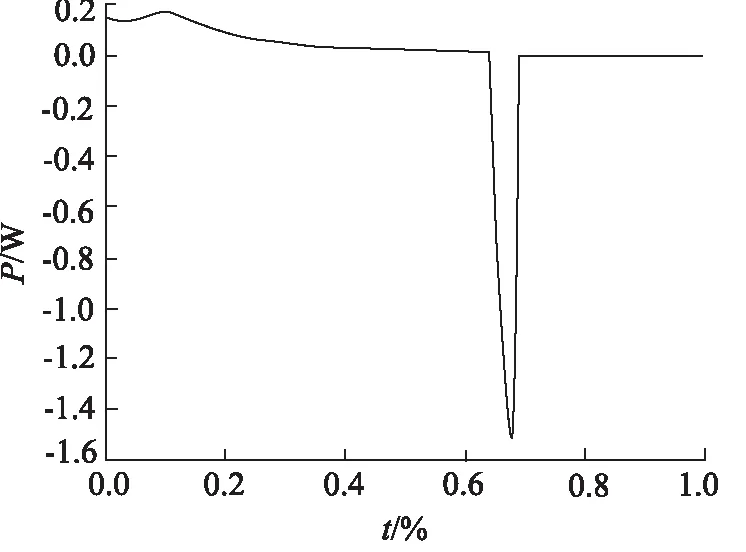
图13 蓄能器输出功率
由于泵在0~0.65 s持续给蓄能器充压,使得在0.65 s微型液压系统切换到主动模式的时候,如图13所示,观察蓄能器的输出功率曲线,蓄能器能够输出150 W的功率。满足系统的输出功率条件。可以看出本研究的优点为可以在电机功率较小的情况下,让主动式液压踝关节假肢输出人体正常行走所需要的力矩。通过EHA原理实现了较小装机功率下输出较大的峰值功率的特性。
4 结论
本研究提出了主动式踝关节假肢的总体方案,设计了基于电静液作动原理的主动式踝关节假肢驱动系统,设计了假肢整体机械结构,通过力学仿真验证了机械结构的合理性,并且通过液压系统仿真,对系统的功能进行了验证。本研究所设计的踝关节假肢,充分利用了EHA系统的特性,为假肢提供所需阻尼并解决了假肢瞬时功率高而平均功率低之间的矛盾。
猜你喜欢
海外星云(2021年6期)2021-10-14
冶金设备(2020年2期)2020-12-28
中外文摘(2020年19期)2020-10-31
重型机械(2020年2期)2020-07-24
意林·全彩Color(2018年7期)2018-08-13
装备制造技术(2018年2期)2018-05-07
现代制造技术与装备(2015年4期)2015-12-23
中国康复理论与实践(2015年7期)2015-05-09
组合机床与自动化加工技术(2014年10期)2014-03-01
中国新技术新产品(2013年6期)2013-05-12
