
江阴大桥实测数据时间同步分析
2019-01-12 04:07,,,,,
浙江工业大学学报 2019年1期
,, ,, ,
(1.浙江工业大学 建筑工程学院,浙江 杭州 310023 ;2.温州大学 建筑工程学院,浙江 温州 325035)
江阴大桥是我国首座跨径超千米的特大型钢箱梁悬索桥,主跨长1 385 m,全长3 071 m,是我国大型桥梁发展史上的一座里程碑。江阴大桥也是早在20世纪末就已安装了结构健康监测系统的桥梁之一[1-2],其结构健康监测系统于1999年投入运营。作为第一代结构健康监测系统,其传感器的数量和规模有限,而且长期运营也面临诸多问题。为此,原有结构健康监测系统于2004年开始升级改造。在系统升级改造期间,江阴大桥靠近靖江一侧的主梁不幸遭受一艘打桩船的撞击。当时,传感器系统已经完成升级并投入使用,它们成功记录了船撞过程的桥梁加速度等响应数据。然而,由于数据传输网络尚未完成升级,各个数据采集仪的内部时钟尚未达成同步,从而导致所采集的结构健康监测数据出现时间不同步现象。换言之,由于当时桥梁监测系统存在缺陷,导致采集的数据存在时间不同步的现象。船撞期间的桥梁响应监测数据对于桥梁撞后状态评估的重要性不言而喻,然而,如果不同部位的监测数据在时间上存在不同步,可能导致分析结果出现错误。监测数据时间不同步的其中一个直接后果即是它们之间的相位信息将出现重大误差,而相位则是反映结构性能和损伤的重要指标,是结构损伤识别的重要依据之一[3-7]。因此,对江阴大桥船撞期间结构健康监测数据进行时间同步分析是必要且有意义的。
时间同步是无线传感器网络领域的研究热点之一[8-17]。在无线传感器网络中,每个传感器节点都有各自独立的处理器和时钟,因此,每个节点的时钟未必与其他节点的时钟同步。此外,各个传感器的采集启动时间的不同、各个节点采样频率的不同以及采样频率随时间而变化等因素都可能导致无线传感器网络无法实现精确同步。目前,业界普遍采用时间同步协议来解决无线传感器网络的时间不同步问题,如:RBS协议[18]、TPSN协议[19]、FTSP协议[20]、PulseSync协议[21]、μ-Sync协议[22]、TSRTS协议[23]以及2LTSP协议[24]等。值得一提的是,无线传感器间的时间同步协议精度非常高,比如在Imote2平台上应用FTSP时间同步协议,精度可达10~80 μs量级[12]。虽然时间同步协议能帮助无线传感器网络实现较高精度的时间同步,但是它们并不适用于纠正实测数据的时间不同步问题。在这方面,现有研究仍十分有限。Lei[25]等提出了ARX (Auto-regressive with exogenous input)和ARMAV (Auto-regressive moving average vector)这两种时间同步算法。前者用于输出信号和输入信号之间的时间同步,而后者用于两个输出信号之间的时间同步。为评估无线传感器网络的时间同步精度,Lynch[26]等采用无线信号与参考有线信号之间的最小误差范数,确定两者之间的时间延迟。类似地,Shen等[27]运用无线和有线传感器数据间的互相关函数来估算它们之间的时间延迟。然而,上述研究仅利用模拟数据进行方法验证,它们在环境激励下实际结构的实测异步数据时的性能仍不得而知。因此,笔者采用相关系数算法进行江阴大桥实测加速度数据时间同步分析。鉴于相关系数算法只适用于两个信号的局限性,采用任意选取其中一个信号作为参考信号,固定其时间轴,其余信号为时间平移信号。然后平移信号以一定的时间步长相对参考信号进行移动,当参考信号与平移信号之间相关系数的绝对值达到最大时,则认为此时的平移时间即为信号间的实际时间延迟。借助江阴大桥船撞期间实测数据展开研究,并利用船撞事件对其进行了验证。值得强调的是,笔者还使用频域分解法(FDD)对船撞期间时间同步后的实测数据进行江阴大桥的模态识别,用以验证相关系数算法的准确性。
1 江阴大桥结构健康监测系统
江阴大桥结构健康监测系统经过升级改造后,主要有4 个部分组成,即传感器系统、数据采集与传输系统、数据储存与管理系统以及预警与安全评估系统。其中对于传感器系统的升级,按监测内容与监测传感器不同可分为:振动监测系统、环境监测系统和主梁位移监测系统。由于笔者仅对实测加速度进行分析,在此重点介绍桥梁振动监测系统,如图1所示。图1(a)为江阴大桥主跨钢箱梁的加速度传感器和数据采集仪布置图。由图1可见:大桥主跨钢箱梁上共安装15 个加速度传感器,均匀分布在主跨的1/8,1/4,3/8,1/2,3/4断面处。在每个断面上,一个加速度传感器安装在断面中央以测量桥梁水平横向加速度,另外两个加速度传感器则分别被安装在断面两侧以测量桥梁竖向加速度。大桥上总共安装了8 个数据采集仪用以收集附近传感器的模拟信号,并将模拟信号转换成数字信号。其中6 个数据采集仪安装钢箱梁内,其余2 个分别位于前、后锚室内。主跨1/8,1/4,3/8断面处的加速度传感器分别与3 号数据采集仪(DAU3)、4 号数据采集仪(DAU4)和5 号数据采集仪(DAU5)相连接。值得强调的是,主跨1/2,3/4断面处的加速度传感器都与7 号数据采集仪(DAU7)相连接。实测加速度的采样频率为50 Hz,每一小时保存一份数据。
江阴大桥遭行船撞击发生在2005年6月2日20点14分左右。肇事船为一只打桩船,船撞位置接近AD5EV号梁端截面(图1a)。图2为船撞期间加速度实测数据时域图,可以看出:加速度AD9CL,AD13CL在船撞期间有且仅有一个明显波形,同样地,其余实测加速度也存在一个类似的波形,因此,可以推断它们是由船撞引起的,并且此波形引起的撞击响应约为2 min。回看图2,通过对不同位置传感器的响应变化分析可知:不同位置处的加速度信号的波形极为相似,由此粗略推断桥梁并没发生明显损伤,说明此次船撞事件对结构产生的冲击波较小。另外,朱绍玮[2]等对受撞击后的江阴大桥的基于自联想神经网络的损伤检测分析同样表明:本次船撞事故对结构造成的总体损伤程度较小,无明显局部构件破损。因此,此次船撞事件并未对江阴大桥造成损伤。借助船撞事件引起的波形,显而易见:AD9CL,AD13CL之间是时间不同的,并且它们之间时间延迟量相当大,这也说明对江阴大桥进行时间同步的必要性。回看图2,在加速度AD13CL出现船撞波形的同一时刻,加速度AD11CL也出现与加速度AD13CL一样的船撞波形,再则上述中提及,加速度AD11CL,AD13CL相连于同一个数据采集仪,说明AD11CL,AD13CL是时间同步数据。值得一提的是,当对AD11CL,AD13CL船撞峰值进行对齐时,发现它们之间存在1.76 s的偏差,这可能是由于船撞冲击力沿桥梁传播本身存在一定的延迟,同时也说明通过简单的对齐加速度峰值来寻找异步数据的时间偏差是不够准确的。鉴于以上情况,笔者提出采用相关系数的时域校准方法识别江阴大桥船撞期间实测数据的时间延迟。
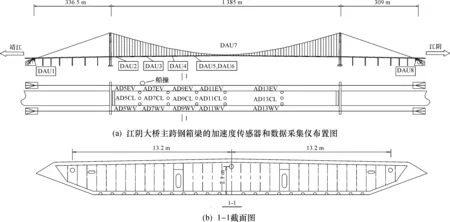
图1 江阴大桥主跨钢箱梁的加速度传感器和数据采集仪布置图Fig.1 Deployment of accelerometers and DAUs on deck of Jiangyin bridge

图2 船桥碰撞期间实测的桥面横向加速度Fig.2 Lateral accelerations of bridge deck measured during ship-bridge collision
2 相关系数算法
众多研究表明:同一系统测得的加速度信号往往存在某种内在规律,但无法用确切的数学表达来表示。而相关系数是描述信号间相关程度的指标[28],即可以通过计算信号间的相关系数来寻求它们的实际依存关系。在一个试验中,产生两组成对的随机过程x(i),y(i),计算x-μx,y-μy的平均乘积。取样本容量N→∞时的极限,这个平均乘积就成为x(i),y(i)之间的协方差,其定义为

(1)
随机过程x(i),y(i)的相关系数为
(2)

根据相关系数的特性可知:理论上当γxy越接近1时,随机过程x(i),y(i)的线性相关程度越好,波形吻合程度越高。特别地,相关系数接近于1的程度与样本容量N的大小有关。当样本容量N较小时,仅凭相关系数较大就判定随机过程x(i),y(i)之间有密切的线性关系是不妥当的。所以合理选择样本容量对分析数据的结果也至关重要。
因此,采用相关系数算法来识别加速度数据的时间延迟。桂新[29]等利用相关系数算法研究水下地形测量信号之间的时间延迟,最终获得了较为理想的效果。殷兴华[30]利用相关系数算法解决了视频拼接中源视频在时间上不同步的问题。另外,考虑到相关系数算法只适用两个信号通道求解的局限性。鉴于此,首先任意选择一个加速度信号作为参考信号,而其余的加速度信号作为时间平移信号,用于解决多通道存在时间延迟的问题。将参考信号的时间轴固定,平移信号的时间轴以一定的时间间隔进行移动。对于每一次平移,通过相关系数算法求解参考信号与平移时间信号的相关系数。最后当参考信号与时间平移信号的相关系数达到最大值时,最大相关系数所对应的平移时间,即为参考信号与时间平移信号的时间延迟。参考信号与时间平移信号之间的相关系数的表达式为
(3)
式中:τ=kΔt为参考信号与时间平移信号的时间延迟,Δt为采样间隔,k为参考信号与时间平移信号的平移数据量;N为采样数据的总个数;y(i),x(i)分别为参考信号与时间平移信号;ux,uy分别为x(i),y(i)的平均值。
3 计算结果与讨论
3.1 实测数据时间同步分析
以加速度AD9CL,AD7CL的时间同步分析为例,详细阐述相关系数方法识别异步数据间时间延迟的过程。再次重申,加速度AD9CL,AD7CL都有一个由船撞事件引起的波形,通过对齐船撞峰值,大致确定了两者之间的时间延迟,并考虑到相关系数算法的容错能力(将其他可能事件也考虑其中),确定时间平移信号的搜索范围为-250~0 s。图3为相关系数随平移信号AD7CL进行时间平移的变化图。如图3所示,平移信号以时间步长0.02 s进行精确搜索,从0 s开始,相关系数总体上随平移时间的增大而增大,在第-121.78 s处相关系数取得最大值,随后相关系数逐渐减小。值得注意的是,在搜索范围-240~-180 s,包含了船撞事件发生前的显著事件,可以发现相关系数绝对值的总体趋势随平移时间(绝对值)的增大而减小,证明相关系数算法具有较高的容错能力。由图3可知:加速度AD9CL,AD7CL之间时间延迟为-121.78 s。同理可得其余加速度AD5CL,AD11CL,AD13CL,AD9CL的识别结果,如表1所示。表1为船撞期间各个加速度与加速度AD9CL之间的时间延迟。可以从表1中发现:加速度AD11CL,AD13CL与加速度AD9CL之间的时间延迟都为-522.70 s,这正好与事实相符,因为AD11CL,AD13CL的加速度传感器都相连于同一个数据采集仪。利用已识别的结果,将加速度AD5CL,AD7CL,AD11CL,AD13CL与加速度AD9CL进行时间同步。图4为时间同步后的船撞期间桥面横向加速度图。如图4所示,各个加速度的船撞事件引起的波形均发生在同一时刻。通过对比图2,说明已将船撞期间的异步数据实现时间同步,验证了相关系数算法的准确性。
表1船撞期间实测加速度时间延迟
Table1Timelagsbetweenaccelerationsmeasuredduringship-bridgecollision
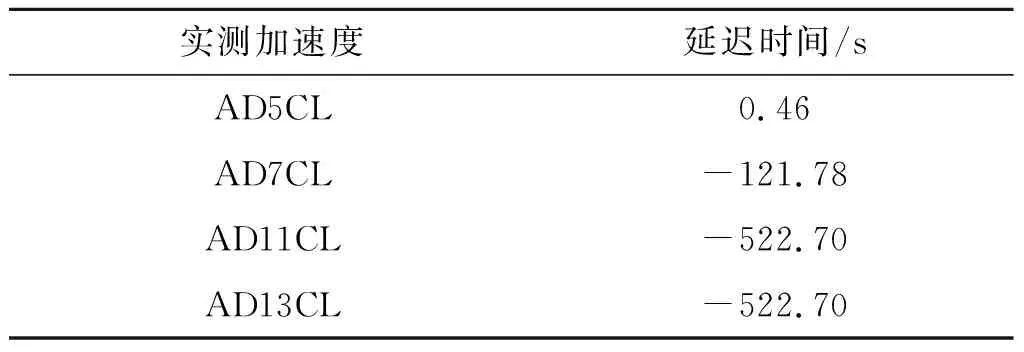
实测加速度延迟时间/sAD5CL0.46AD7CL-121.78AD11CL-522.70AD13CL-522.70
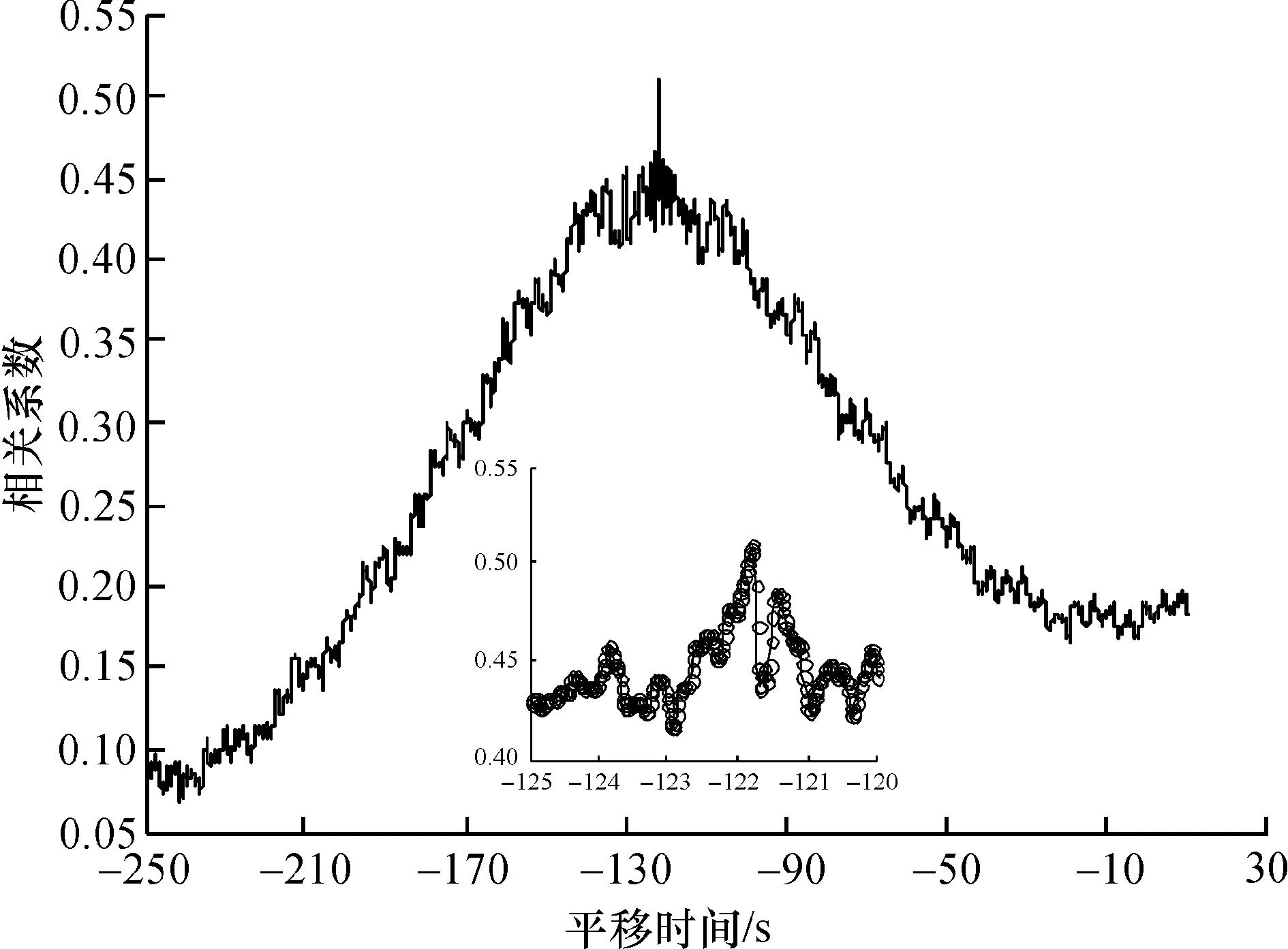
图3 船撞期间的加速度的相关系数随平移时间的变化图(AD9CL ,AD7CL)Fig.3 Correlation coefficient versus shifting times for acceleration measured during ship-bridge collision(AD9CL, AD7CL)
相关系数方法是通过寻求数据间的大规律来识别异步数据的时间延迟,相关系数算法是一种时域校准方法,此方法往往需要大量数据进行驱动,才能保证计算的正确性。笔者使用相关系数方法识别异步数据的时间延迟时,采用了一个小时的监测数据,共包含180 000 个数据。如表2所示,以20:00:00为起始时间,列出了时间同步后船撞事件的峰值加速度的出现时间。可见各个加速度出现船撞事件峰值的时间不尽相同。以加速度AD9CL为基准,峰值出现时间最大相差6.22 s(加速度AD5CL),而最小相差4.32 s(加速度AD13CL)。不难发现:相关系数算法考虑了整个时域信号之间的相关程度,而船撞事件对相关系数算法在整个时域中时间延迟的识别影响不大。
表2时间同步后船撞事件的峰值加速度的出现时间
Table2Timeofoccurrenceofpeakaccelerationsintimesynchronizedaccelerations

实测加速度船撞时间/sAD5CL863.20AD7CL856.98AD11CL858.88AD11CL858.80AD13CL857.04

图4 时间同步后的船桥碰撞期间桥面加速度Fig.4 Time synchronized accelerations of bridge deck measured during ship-bridge collision
3.2 模态分析
为了验证时间同步后的实测数据是否具有足够的精度用于模态分析,采用频域分解法(FDD)进行江阴大桥的模态识别。结果表明:从时间同步后的实测数据中成功识别出江阴大桥前两阶横向模态。江阴大桥前三阶横向模态频率与模态振型描述见表3。图5为江阴大桥前三阶横向模态的振型图。由于江阴大桥上的加速度传感器只布置于主跨的1/8,1/4,3/8,1/2,3/4断面处,所以各阶模态振型的5/8,7/8主跨位置分别利用了3/8,1/8主跨的正对称或反对称。
表3前三阶横向模态频率与模态振型描述
Table3Identifiedmodalfrequenciesandmodeshapesofthefirstthreelateralmodes

阶数模态频率/Hz模态振型描述10.054 7一阶对称横弯20.145 0二阶反对称横弯30.270 3三阶对称横弯

图5 江阴大桥前三阶横向模态振型Fig.5 Identified mode shapes of the first three lateral modes
由图5可知:第三阶振型的AD9CL节点位置存在偏差,而前两阶振型是较理想的。因为对于动力监测来说,时间同步的精度要求非常高,即使非常小的同步误差对系统参数的识别也较为显著。比如Krishnamurthy[3]等研究了时间延迟对模态参数识别的影响,当时间延迟量级在30 μs至100 ms之间变化时,其高阶振型识别结果误差很大;Feng等[4-5]研究了时间延迟和采样频率误差对模态参数识别和刚度参数识别的影响,当时间延迟量在20 ms时,两者存在一定的相位差,对高阶振型的识别结果影响显著。另外,实测数据与理想实验中获取的测试数据不同,现场测量数据通常包含更多的不确定性,这可能会降低相关系数算法识别时间延迟的性能。监测系统为有线监测系统,加速度传感器的采样频率为50 Hz,导致现场测量数据的时间分辨率也对时间同步精度施加约束。虽然相关系数算法识别时间延迟的分辨率已达到0.02 s,但并不能保证已达到真正意义上的延迟时间。换而言之,江阴大桥的前几阶模态为低频密频模态,高阶模态对环境噪声和时间同步的误差更加敏感[3,6,12]。因此,再次验证了相关系数算法用于识别时间延迟的准确性。
4 结 论
采用相关系数算法进行江阴大桥结构健康监测数据的时间同步分析。考虑到相关系数算法只适用于两个信号的局限性,通过选取参考信号与时间平移信号来解决多个信号间的时间延迟问题。当参考信号与时间平移信号的相关系数绝对值达到最大值时,所对应的平移时间即为实测加速度之间的时间延迟。该方法成功地识别出了船撞期间实测加速度间的时间延迟,并借助船撞事件验证了相关系数算法的准确性。此外,又利用频域分解法从船撞期间时间同步后的实测数据中成功地识别出江阴大桥前两阶横向模态,再次验证了相关系数算法用于识别时间延迟的准确性。因此,相关系数算法能够准确地识别出异步数据的时间延迟,为后续的研究分析奠定了基础。
猜你喜欢
小主人报(2022年19期)2022-11-18
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
小哥白尼(趣味科学)(2021年4期)2021-07-28
华人时刊(2020年21期)2020-11-17
中华诗词(2020年1期)2020-09-21
铁路技术创新(2020年6期)2020-02-25
幼儿美术(2019年3期)2019-09-10
中华诗词(2019年2期)2019-08-27
空气动力学学报(2018年6期)2018-12-03
