靶向谱修正迭代法
2019-01-05 01:24:24吴光明鲁铁定邓小渊吴建江
测绘工程 2019年1期
吴光明,鲁铁定,2,3,邓小渊,4,吴建江,5
(1.东华理工大学 测绘工程学院,江西 南昌 330013;2.流域生态与地理环境监测国家测绘地理信息局重点实验室,江西 南昌 330013;3.江西省数字国土重点实验室,江西 南昌 330013;4.浙江省地理信息中心,浙江 杭州 310000;5.浙江省地球物理技术应用研究所,浙江 杭州 310014)
病态问题在测量数据处理过程例如在控制网平差[1]、GPS快速定位[2-3]、航空重力向下延拓[4-6]等领域时常碰见。处理病态问题常见方法有Tikhonov正则化法[7-8]、岭估计[9-10]等,然而岭估计和正则化法改变了方程的等量关系,使得估计结果有偏并且岭参数和正则化参数确定困难[11-12]。

1 谱修正迭代法
对于经典平差模型
L+Δ=AX.
(1)
式中:L为n×1观测值向量,A为m×n系数矩阵,X为n×1待定参数,Δ为观测向量的噪声,Δ~N(0,σ02I)。其最小二乘估计及估计的协方差为
(2)
(3)
当法矩阵AΤA出现病态(条件数一般大于103),则法矩阵求逆将会表现得不稳定,导致求解出的参数估值不可靠[12]。

(4)
或者
(5)


(6)
2 靶向谱修正迭代法
谱修正迭代中的(ATA+αI)-1与岭估计相似,岭估计式为
(7)

(8)
整理后
(9)
式中:R是靶向矩阵,其构造方法是基于较小特征值对应的特征向量而构成,
(10)
式中:R1是正则化矩阵,Gi是法矩阵ATA的特征向量。小特征值的判定方法可用特征值标准差分量之和占标准差比重达到95%以上[19],即
(11)
式中:Λi是法矩阵ATA的特征值。将R1作为靶向矩阵并代入式(8)则整理得到本文靶向谱修正迭代式
(12)
谱修正迭代结果是无偏估计,根据文献[13]证明方法,本文靶向修正迭代结果也是无偏的。只要迭代矩阵α(ATA+αR)-1·R的谱半径小于1,迭代就能收敛[20]。在对α(ATA+αR)-1·R进行谱分解,得到
α(ATA+αR)-1·R=
(13)
谱修正参数α选择有多种方法[16-18],没有统一结论。因此本文根据文献[18]的方法,选择一个较长区间、一定步长的参数,讨论不同参数条件下,两种方法迭代结果的比较。
3 算例及分析
3.1 算例1
采用文献[4]中的模拟病态问题算例,法矩阵条件数是4.1847×105,严重病态,其中未知参数的真值为X=[111111111]T。为比较两种方法的估计结果,取迭代初值为X=[0.80.80.80.80.80.80.80.80.8]T或其他初值均可,不能选择最小二乘估值作为迭代初值,若选择最小二乘估值将无法迭代。根据文献[18]的方法,取谱修正参数α=1,10,20,30,分别用最小二乘估计、谱修正迭代法、靶向谱修正迭代法对这个问题进行解算,结果见表1。

表1 两种算法的解算结果
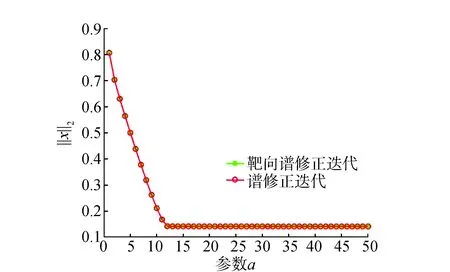
图1 两种方法结果
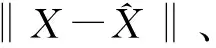
从图1可以看出,两种方法的差值范数基本相等,结果基本一致;见图2(a)图是α=1~50,由于竖轴刻度较大,两种方法迭代次数也近乎相等;由图2(b)看出,在α>11时,本文方法迭代次数少于谱修正迭代法。根据这个算例,靶向谱修正迭代法与谱修正迭代法相比,在参数估计和差值范数上没有较大变化;但在参数逐渐增大时,迭代次数降低,计算效率提高,体现出本文方法的优势。

图2 两种方法迭代次数
3.2 算例2


表2 两种算法的解算结果
从图3可以看出,图3(a)是α=1~17,两种方法的差值范数基本相等;由图3(b)看出,在α>17时,本文方法差值范数小于谱修正迭代法。见图4,1<α<17时,两种方法迭代次数基本相等;而α>17时,本文方法迭代次数远小于谱修正迭代法。这个算例表明,参数逐渐增大,两种方法在参数估计、差值范数、迭代次数上先是没有较大变化,但参数继续增大时,本文方法解算的差值范数和迭代次数均降低,进一步验证靶向谱修正迭代法高效、快速解算。

图3 两种方法解算结果
图4 两种方法迭代次数
4 结束语
谱修正迭代法是修正法矩阵所有谱且结果是无偏估计,而一般病态问题是法矩阵的几个谱奇异,因此存在谱多余修正问题。针对该问题,本文提出靶向谱修正迭代法,即将谱修正迭代矩阵中的单位阵变换成靶向矩阵,迭代过程中只修正法矩阵奇异的谱。通过模拟算例对比两种方法解算的估计结果、偏差范数和迭代次数,得到以下结论:
1)谱修正参数相同条件下,两种方法迭代矩阵的谱半径相等,且估计结果均是无偏的;
2)伴随着参数增大,本文方法的解算的参数估值将优于谱修正迭代,并且偏差范数更低、迭代次数相比也更少。
因此,在探讨处理病态问题时,相比谱修正迭代法,本文方法在估计结果更优且快速迭代,计算效率高。本文递增选取参数,参数选择未深入分析,因而参数如何选取有待进一步研究。
猜你喜欢
中等数学(2022年8期)2022-10-24 02:06:24
中国校外教育(下旬)(2017年8期)2017-10-30 17:32:36
数学物理学报(2017年3期)2017-07-01 16:18:48
数学理论与应用(2016年1期)2016-02-28 09:26:04
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:40
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
新乡学院学报(2015年6期)2015-11-06 08:04:55
电网与清洁能源(2015年2期)2015-02-28 16:03:15
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:06
应用数学与计算数学学报(2014年4期)2014-09-26 12:15:56