
基于有限状态机的车辆自动驾驶行为决策分析*
2018-12-26 05:23冀杰黄岩军李云伍吴飞
汽车技术 2018年12期
冀杰 黄岩军 李云伍 吴飞
(1.西南大学,重庆 400715;2.滑铁卢大学,加拿大 安大略省 N2L3G1)
主题词:智能车辆 自动驾驶 有限状态机 危险势能场 行为决策
1 前言
驾驶行为决策是智能车辆研究领域的关键问题之一,也是自动驾驶系统智能化水平的重要体现。在实际道路交通环境中,智能车辆所面临的驾驶环境和交通状况存在多样性、随机性和不准确性等特征,而人们对车辆自动驾驶的安全性和实时性要求不断提高,这对驾驶行为决策系统提出了巨大挑战[1-2]。因此,设计能够满足复杂道路工况要求的自动驾驶行为决策系统对智能车辆研究具有重要的理论意义和应用价值。
自上世纪80年代以来,随着环境感知及智能控制技术的不断发展,移动机器人相关研究取得了飞跃式进展并涌现出了许多行为决策方法,包括神经网络决策方法、马尔科夫决策方法、贝叶斯网络决策方法以及模糊决策方法等[3-5]。然而,上述决策方法大多对控制单元的计算能力要求较高且与驾驶员的实际驾驶行为决策方式存在较大的差异。因此,上述方法难以直接应用于智能车辆的驾驶行为决策系统中[6]。
近年来,有限状态机(Finite State Machine,FSM)技术的兴起和应用为智能车辆自动驾驶行为决策提供了新的思路[7]。例如,熊光明等人提出了一种智能车辆交叉口行为预测与控制方法,并建立了相应的有限状态机模型,从而对交叉口其他车辆的行为进行了准确预测[8];熊璐等人基于分层决策思想和有限状态机理论设计了差动转向无人车的整车控制策略,从而有效地实现了无人车各运动模式间的切换[9];冯关明等人基于有限状态机理论和模糊逻辑控制理论设计了具有主动安全性的汽车自适应巡航控制(Adaptive Cruise Control,ACC)系统,使车辆在加速行驶、车辆跟踪和制动减速等行驶工况下保持跟踪性和适应性[10]。从上述文献可以看出,有限状态机理论可用于实现交叉路口行为预测、差别转向以及自适应巡航等部分自动驾驶功能。但是,如果利用有限状态机方法实现复杂道路工况下的自动驾驶行为决策,则需考虑车辆运动学以及动力学特性对驾驶行为决策的影响,同时,需基于实际道路交通状况,对各状态之间的切换依据进行定量分析。
因此,本研究将对智能车辆的典型自动驾驶行为进行分析和分解,并基于有限状态机理论设计面向结构化道路环境的智能车辆自动驾驶行为决策系统。同时,构建能够反映实际道路交通状况的虚拟危险势能场,并依据势能场对自动驾驶行为决策依据进行定量分析。最终,通过MATLAB/CarSim联合仿真及比例道路模型试验对上述理论进行验证。
2 自动驾驶行为分析及决策模式
对于智能车辆的自动驾驶行为决策而言,需要根据当前的道路环境感知信息以及自身运动状态,对车辆周围的道路交通危险态势进行准确判断,同时,要依据自动驾驶任务目标以及安全行驶行为准则,在不同的驾驶行为模式之间作出及时准确的决策[11]。因此,对智能车辆的主要自动驾驶行为进行分析是进行决策的重要前提。
智能车辆自动驾驶运动过程如图1所示,由图1可以看出,当智能车辆在结构化道路环境下行驶时,根据车辆在行驶过程中的不同运动状态,可将自动驾驶过程分解为4种基本的驾驶行为模式。主要包括:
a.车道保持行为(A)。自动驾驶系统采取的一种缺省模式,指智能车辆始终沿所在车道行驶的行为。
b.车辆跟随行为(B)。根据所在车道前方车辆的行驶状态信息,通过控制油门或制动踏板,自适应调整智能车辆的行驶速度,使之以安全间距跟踪前方车辆行驶。
c.车道变换行为(C)。当智能车辆所在车道不具备通行条件时,从所在车道切换到相邻车道行驶的过程。根据目标车道的不同可以分为主车道切换至超车道和超车道切换至主车道两种情况。
d.制动避撞行为(D)。当智能车辆前方出现紧急或者意外危险情况且不具备车道变换条件时,智能车辆要采取紧急制动行为,避免与前方障碍物或车辆发生碰撞。
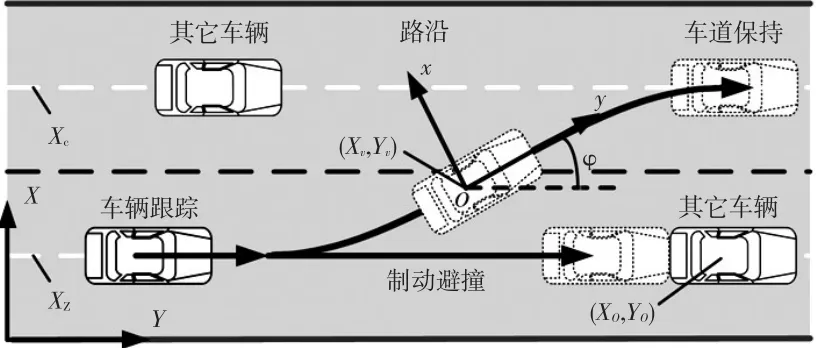
图1 智能车辆的自动驾驶行为
从以上分析可以看出,智能车辆的各驾驶行为模式之间是相互关联的,通过其相互间的实时切换,可在结构化道路上实现主要的自动驾驶功能。根据智能车辆所在车道以及相邻车道上的车辆运动状态信息和障碍物信息,可以确定自动驾驶行为决策的基本触发条件,如表1所示。
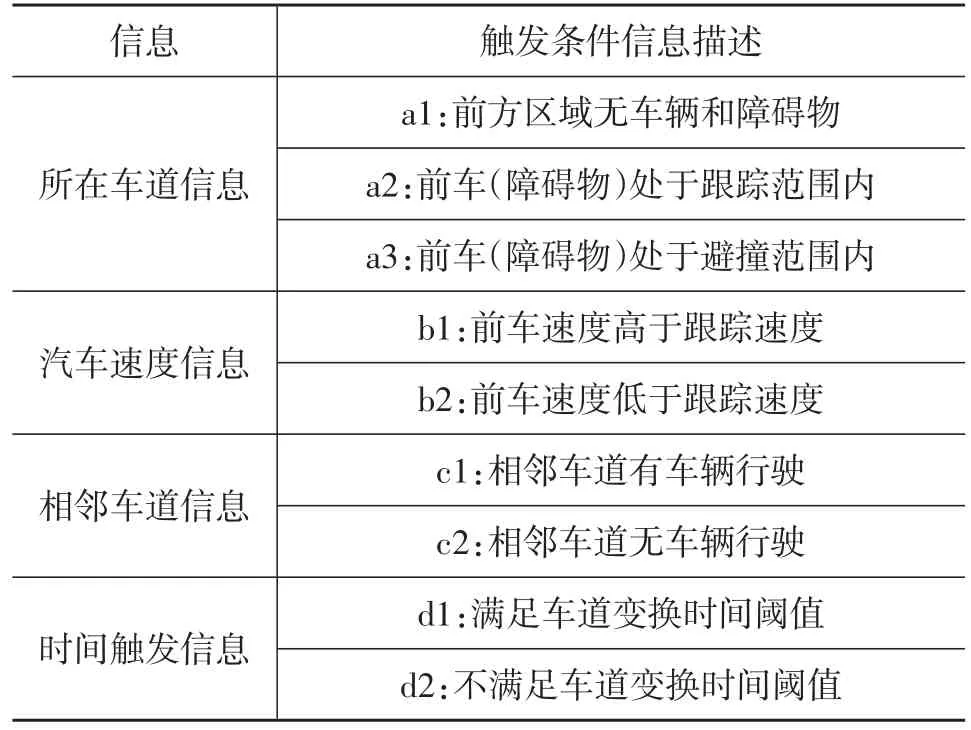
表1 基本触发条件信息
对智能车辆在不同车道上的自动驾驶行为模式(A、B、C、D)进行细分,并与表1所示的自动驾驶行为决策触发条件进行组合,得到如图2所示的决策及模式切换示意图。从图2可以看出,当智能车辆在结构化道路上进行自动驾驶时,各种驾驶行为模式之间存在多种切换动作,每一种切换动作的执行条件由不同的触发信息组合而成。
3 基于有限状态机的驾驶行为切换
自动驾驶行为决策过程是一种非连续的状态表达形式,采用传统数学模型难以有效解决此类问题,而有限状态机是用来研究有限个状态的计算及这些状态之间的转移和动作等行为的离散数学模型[12]。因此,构建自动驾驶系统的行为决策有限状态机表达式为:式中,T为状态机中所有自动驾驶行为模式的集合;E为各状态所能接收的所有输入的集合,即引起驾驶行为模式状态转换的触发条件集合;δ为状态转移函数,δ:T×E→T;t0∈T为自动驾驶行为初始状态;F⊆T为自动驾驶行为终止状态集合。

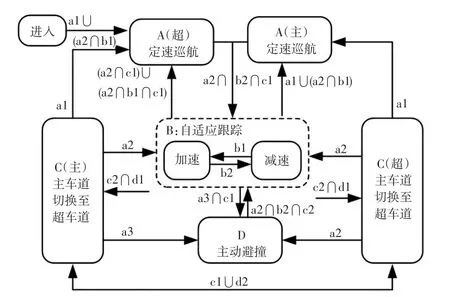
图2 自动驾驶行为模式切换过程
对于智能车辆而言,基本驾驶行为模式(T)之间的切换主要由自动驾驶任务决定,它属于外部事件(E)触发的系统对象。自动驾驶系统的初始状态t0=A(主)是在主车道上执行定速车道保持模式(即缺省模式),而终止状态F则表示脱离自动驾驶并转为人工驾驶模式。根据不同车道上的实际道路工况,有限状态集合T可细分为6种有限驾驶行为状态,即T={A(主),A(超),B,C(主),C(超),D},如图2所示;驾驶行为模式之间的触发事件主要取决于主车道和超车道上的车辆运动状态,即E={a1,a2,a3,b1,b2,c1,c2,d1,d2},如表1所示;状态转移函数表示智能车辆在接收到不同的状态触发信息时,从一个驾驶行为模式转移到另一个驾驶行为模式的规则,可以看作状态转移规则集合。
根据自动驾驶系统的行为决策模式分析以及人工势能场基本理论,利用MATLAB软件的Stateflow设计开发工具箱,构建如图3所示的有限状态机仿真模型,从而对智能车辆自动驾驶行为模式的决策过程进行图形化描述。
4 状态转移条件分析
通过对有限状态机模型的五元组进行定性分析可知,输入集合及状态转移函数是实现自动驾驶行为决策的关键。因此,基于危险势能场理论对有限状态机的触发条件和状态转移函数进行定量分析[13-14]。
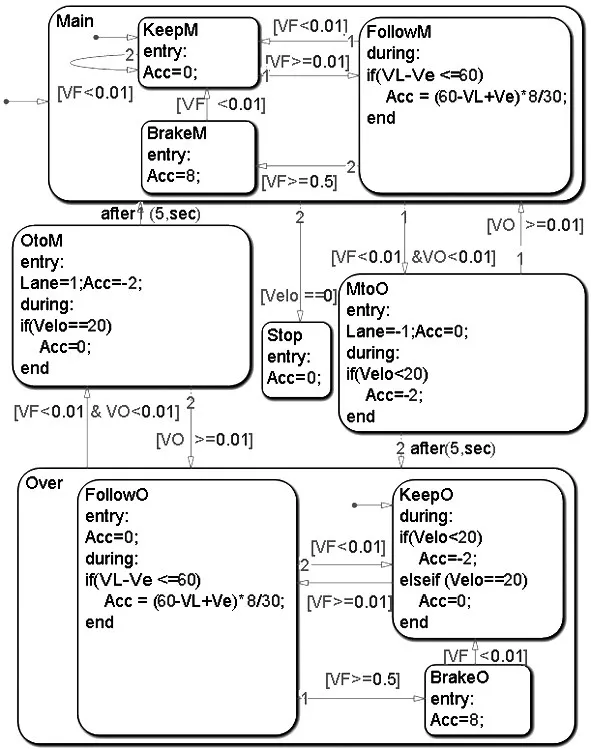
图3 自动驾驶行为决策有限状态机模型
对智能车辆所在的道路环境进行参数化建模和区域划分,如图4所示。图4中,分别以道路宽度和长度方向为X轴和Y轴建立道路坐标系,Lw和Lc分别为车辆危险势能场的宽度和长度,(Xo,Yo)为其他车辆的几何中心在道路坐标系下的位置,PF、PL分别为智能车辆位置和相邻车道上对应位置的势能场。设定智能车辆所在车道前方Lc/2范围内的区域为制动避撞区域,保证车辆有足够的空间和时间用于主动制动并避免发生碰撞;智能车辆所在车道前方Lc/2~Lc范围内为车辆跟随区域,用于实现自适应跟踪功能;而智能车辆相邻车道的前、后Lc范围为车道变换区域,该区域的中心位置可用于判断是否具备车道变换条件。当智能车辆位于超车道时,相应的区域划分沿两车道间的中心线左右互换。
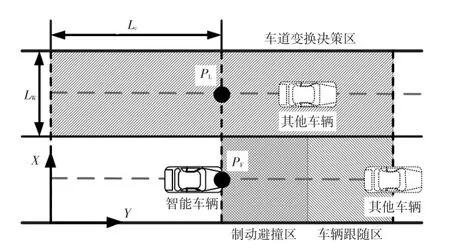
图4 危险势能场区域划分
根据上述道路区域划分以及其他车辆的行驶工况信息,利用三角函数及指数函数构建三维虚拟危险势能场,并基于该势能场对状态转换触发条件进行定量分析。该势能场P(X,Y)主要由道路危险势能Pr(X,Y)和车辆危险势能Po(X,Y)共同构成:

4.1 道路危险势能场构建
当划分的各区域内无其他车辆行驶时,构建的道路危险势能场应保证车辆能够在当前车道上行驶(即自动驾驶行为缺省模式)。
为实现该目标,设定道路两侧的危险势能为1,主车道和超车道中心线的危险势能均为0,两车道中间的危险势能为Pm,取值范围为0<Pm<1,道路中心及两侧的势能场保证了车辆在车道中心行驶时的危险势能最小,进而实现车道保持的功能。
利用三角函数构建道路危险势能场为:

式中,A(X)为道路危险势能幅值随道路宽度的变化参数:

式中,Xz和Xc分别为主车道和超车道中心线的横向坐标。
将道路的结构参数Lw、Xz、Xc以及道路中心危险势能Pm代入式(3),可得到道路上不同横向位置的三维虚拟危险势能值,如图5所示。
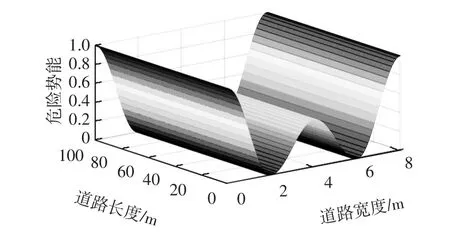
图5 道路危险势能场(Pm=0.5)
4.2 其他车辆危险势能场构建
以其他车辆的几何中心坐标(Xo,Yo)为原点,利用人工势场理论中的斥力场指数函数构建三维虚拟危险势能场为:

式中,c1和c2分别为危险势能在道路宽度和长度方向上的变化系数,两个系数直接影响障碍物危险势能场的三维结构。
c1应尽量不影响相邻车道中心线上的道路危险势能场,从而保证车辆在相邻车道上能够执行车道保持功能:

c2是智能车辆主动制动避撞以及车辆跟随驾驶行为决策的触发条件依据,可根据智能车辆的最大制动减速度及车辆跟随距离的需要确定:
式中,P1为车辆跟踪势能阈值;P3为车道变换势能阈值。
c1和c2确定后带入式(5)即可获得如图6所示的其他车辆三维虚拟危险势能场。
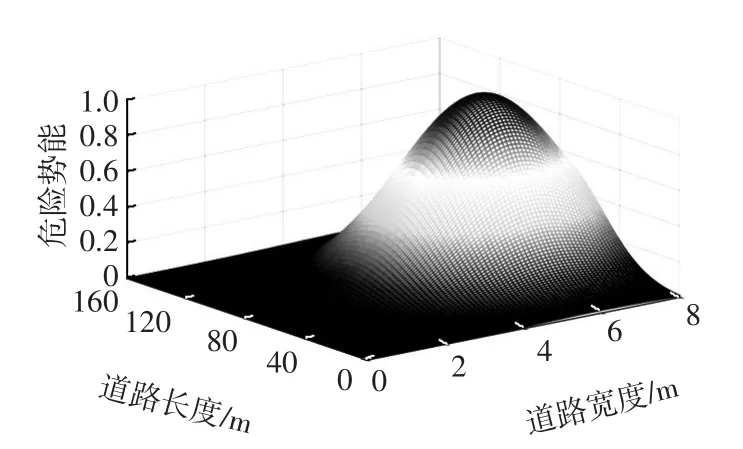
图6 其他车辆三维虚拟危险势能场
根据式(5)和图6可知,车辆几何中心处的斥力场值最大,即P0(X0,Y0)=1。随着与(Xo,Yo)间的距离不断增加,危险势能场的值也不断变小。
将构建的道路和车辆危险势能场进行叠加并以此确定车辆自动驾驶行为的状态转移规则。如图4所示,选择智能车辆位置的势能场PF作为车辆跟随及主动避撞行为的决策变量,相邻车道上对应位置的势能场PL作为车道变换行为的决策变量。
根据上述道路区域划分以及决策阈值的确定,得到智能车辆不同自动驾驶行为模式的执行依据如表2所示。表2中,P1、P2和P3分别为自动驾驶的车辆跟踪、制动避撞及车道变换的势能阈值;VL和V1分别为前方车辆速度及跟踪速度阈值;TV和T1分别为车道变换过程持续的时间及时间阈值。
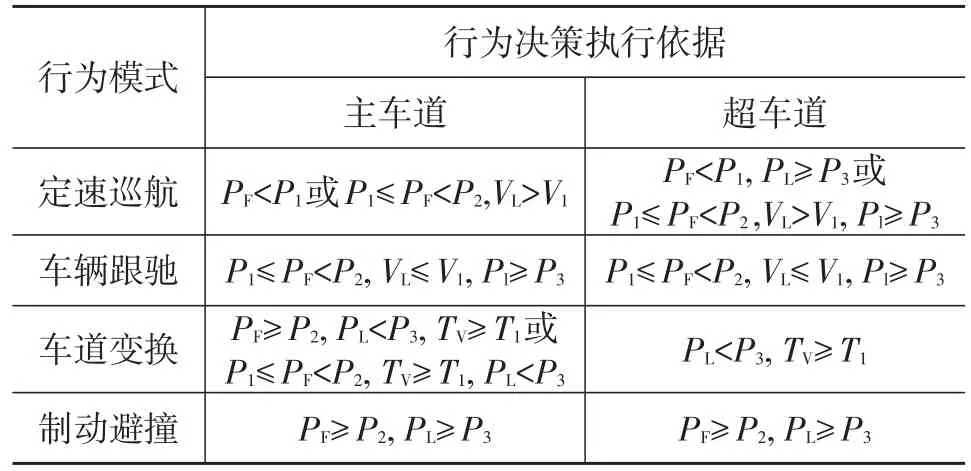
表2 行为决策执行依据
5 驾驶行为决策仿真与试验验证
5.1 基于MATLAB/CarSim的联合仿真验证
基于实际道路的结构参数以及车辆的典型运动特性,利用MATLAB/CarSim软件构建自动驾驶行为决策过程的联合仿真模型,如图7所示。
表3列出了三维虚拟危险势能场的主要参数和数值,并设定了智能车辆以及其他车辆在道路坐标系下的初始位置和初始速度。另外,假设其他车辆的速度随时间变化的趋势如图8所示。

图7 联合仿真系统模型
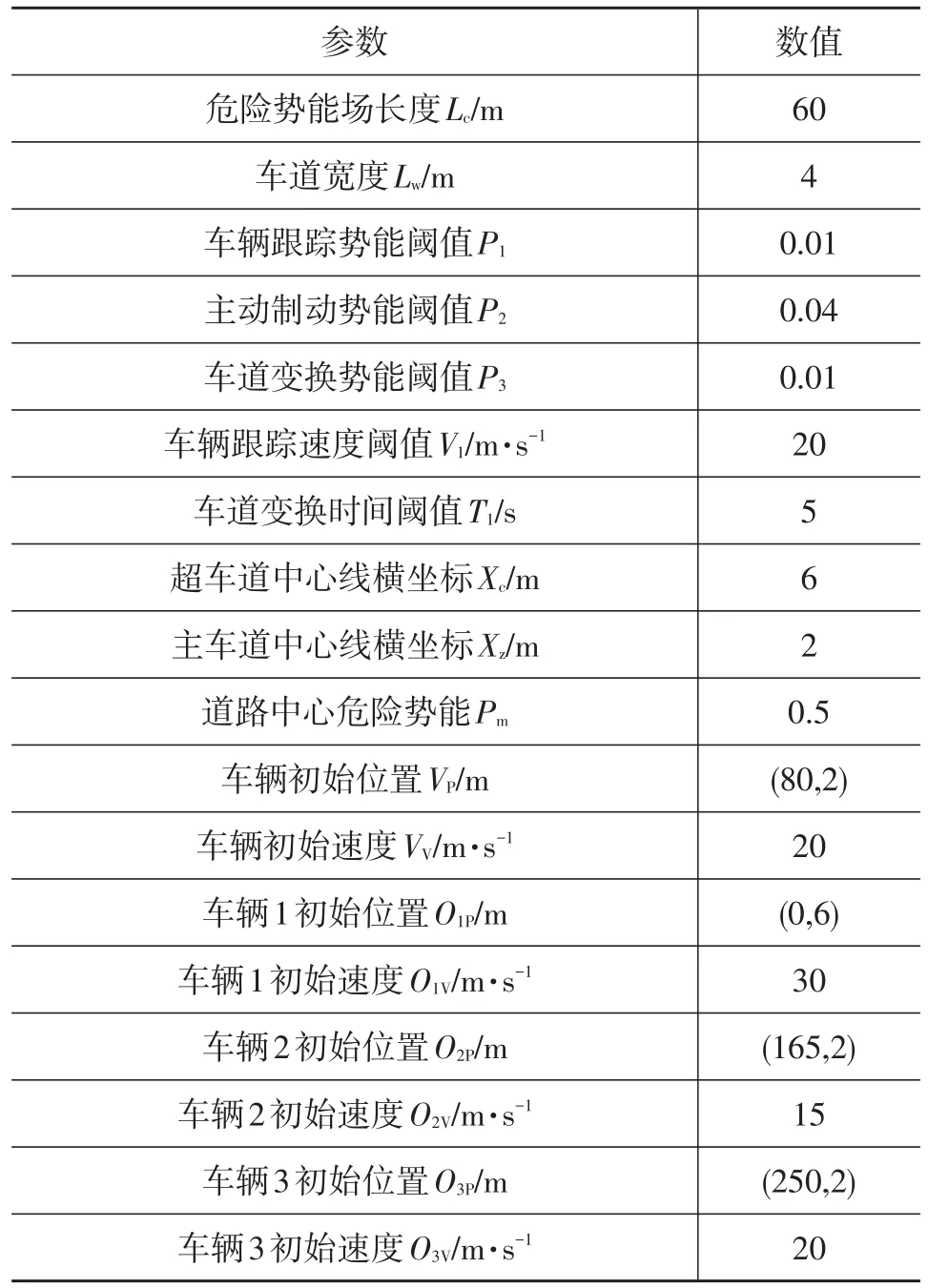
表3 联合仿真系统主要参数

图8 其他车辆的速度曲线
将上述道路交通状况带入联合仿真模型,得到PF和PL的变化曲线如图9所示。根据道路坐标系下的危险势能场三维模型,制定有限状态机的状态触发条件,从而获得智能车辆的自动驾驶行为模式实时决策情况以及车辆速度变化曲线,如图10和图11所示。
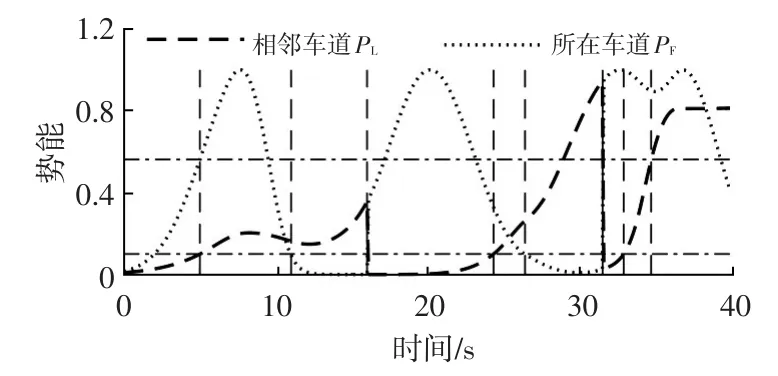
图9 PF和PL位置的势能场
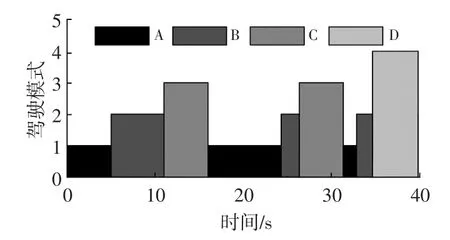
图10 自动驾驶系统行为模式
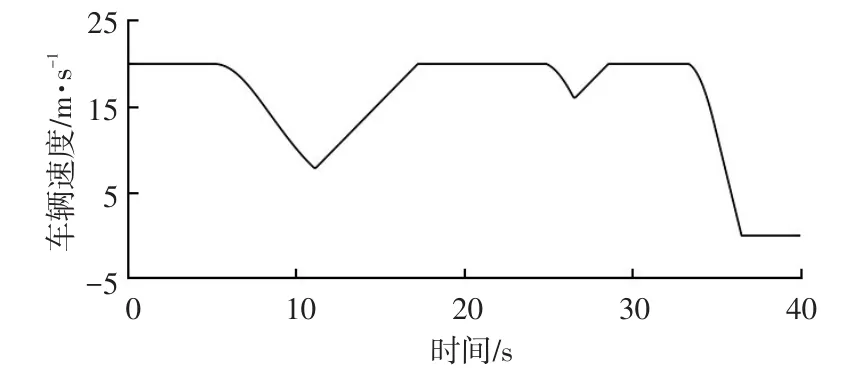
图11 智能车辆速度变化曲线
从仿真结果可以看出,在0~5.0 s仿真范围内,智能车辆所在车道上的危险势能PF始终小于车辆跟随模式的触发阈值(如图12a所示)。根据表2所示的决策执行依据,该工况下不论PL如何变化,智能车辆始终执行车道保持行为模式(即缺省模式)。
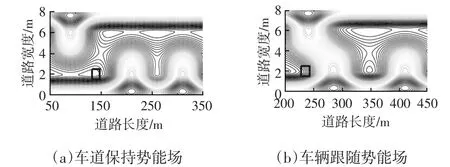
图12 车道保持及车辆跟随模式下的危险势能场
在第5.0~11.0 s仿真范围内,随着智能车辆与前方车辆不断接近(如图13中宽线所示),PF大于车辆跟随决策阈值且小于制动避撞决策阈值,同时,PL大于车道变换决策阈值(见图12b),车辆进入跟随驾驶行为模式。
在第11.0~16.0 s仿真范围内,随着相邻车道上其他车辆与智能车辆的距离不断增大,PL逐渐小于车道变换决策阈值,智能车辆进入车道变换驾驶行为模式并持续5 s。在此过程中,车辆与所在车道前方车辆的最小间距为49.8 m,能够有效保证车辆的主动安全性,如图13所示。车道变换完成后,所在车道与相邻车道的区域划分互换。
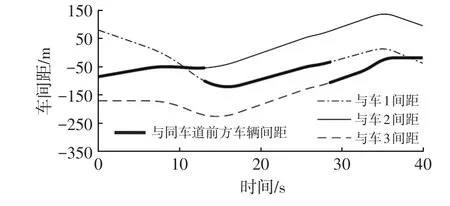
图13 智能车辆与其他车辆的间距
当智能车辆在超车道上行驶时(即第16.0~26.5 s仿真范围),根据所在车道及相邻车道上的危险势能场变化情况,智能车辆分别完成了车道保持模式、车辆跟踪模式。当被控车辆与前方车辆的间距为33.5 m时(见图13),PL小于决策阈值时(见图14a),触发车道变换模式并于第31.5 s时刻切换到主车道行驶(见图10)。
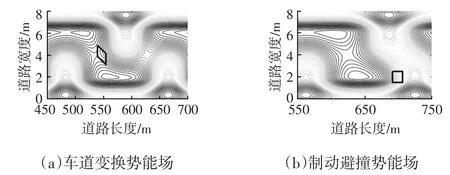
图14 车道变换及制动避撞模式下的危险势能场
智能车辆从超车道变换到主车道后,道路前方的车辆速度逐渐降低并于第34 s时刻静止;另外,由于PL始终大于车道变换决策阈值,不具备车道变换条件(如图14b所示)。因此,智能车辆于第34.71 s时刻进入主动制动避撞驾驶行为模式,并在距离前方车辆18.1 m的处制动停车(如图13中第40 s处宽线所示),从而保证了智能车辆的主动避撞安全性。
5.2 比例模型环境下的驾驶行为决策验证
在微缩比例为1∶20的道路交通环境下,基于机器视觉算法及无线通信技术,建立具有静态障碍物道路工况下的危险势能场,并对自动驾驶行为决策过程进行试验验证,如图15所示。
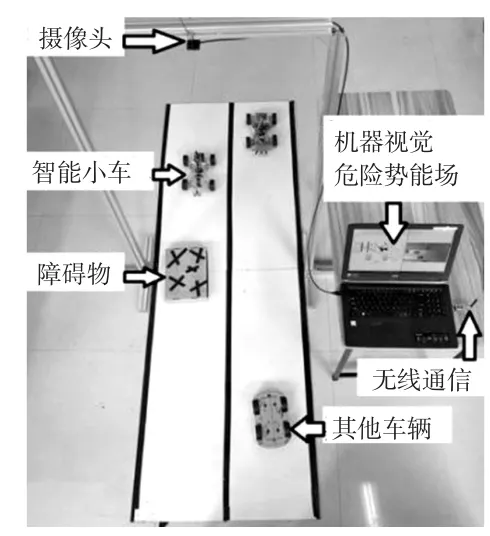
图15 比例道路试验模型
在比例道路模型试验场景下,利用固定在上方的摄像头获得道路环境及车辆模型运动的实时图像信息并进行信号分析,如图16所示。首先,通过Hough变换算法获得道路场景图像中的边缘直线坐标信息;接着,利用SURF算法对道路环境中的障碍物特征信息进行提取并匹配,获得障碍物的坐标信息;最后,根据道路边缘及障碍物的坐标信息,利用本文提出的方法构建实时的虚拟危险势能场三维图像,并将危险势能场的等高线图像叠加到原始的比例道路交通场景中,从而为自动驾驶行为决策提供道路交通场景的定量信息,并为自动驾驶行为状态转移提供判断依据。
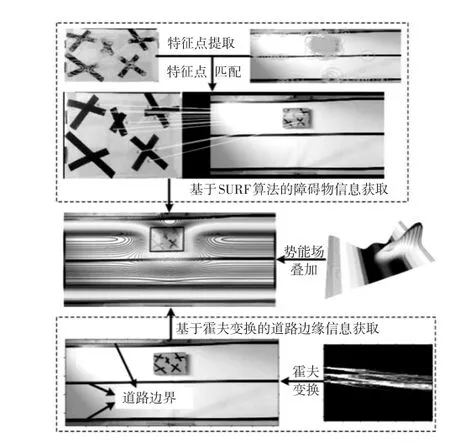
图16 障碍物及道路边界信息感知
另外,自动驾驶行为决策功能的实现,还需要实时获取车辆模型在三维虚拟危险势能场中的位置信息。在本试验场景中,由于比例道路模型上的障碍物为静态,车辆模型是图像中唯一运动的物体。采用机器视觉领域中较为成熟的高斯混合模型(Gaussian Mixture Model)法对道路工况视频图像进行运动目标检测,能够准确获得智能小车在道路模型中的坐标信息,如图17所示。
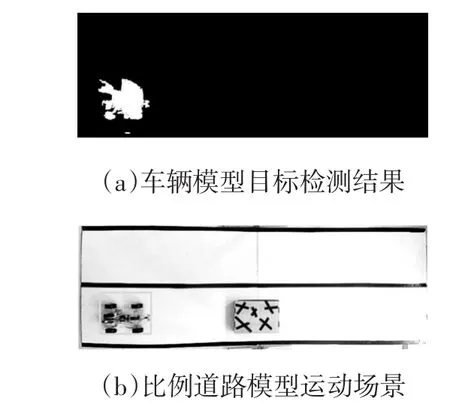
图17 基于高斯混合模型法的车辆模型检测
利用MATLAB软件中的Computer Vision System工具箱计算出车辆模型在道路坐标系下的坐标信息,将其与危险势能场信息一起导入自动驾驶行为决策系统。利用前文设计的有限状态机方法,实时确定车辆模型的自动驾驶行为状态。另外,计算机与车辆模型之间通过无线传输模块APC220进行实时通信。利用MATLAB软件的Instrument Control Toolbox以及Simulink Support Package for Arduino Hardware相关命令,将计算得到的前轮转向角度信息传递到车辆模型的APC220接收器中。车辆模型上的Arduino控制器根据APC220的无线信号控制前轮舵机的转向角和直流电机的速度,并形成闭环控制回路,如图18所示。最终,控制车辆模型实现主动避撞的自动驾驶行为决策。
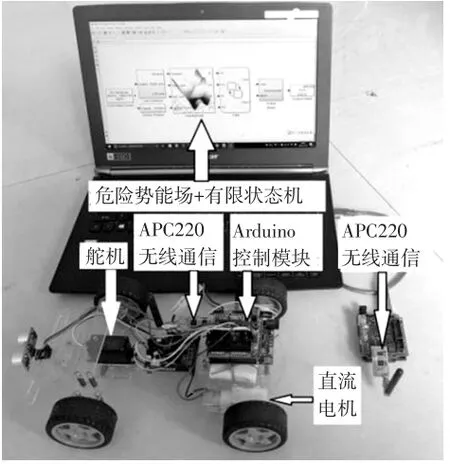
图18 无线通信及控制系统
Simulink仿真模型采用Arduino模块作为外部时钟,保证试验过程的实时性。分别完成6次自动驾驶行为决策试验,对车辆模型的运动轨迹进行记录,并求取轨迹平均值,如图19所示,6次试验均能有效避开障碍物并回到原车道,证明了驾驶行为决策系统的有效性。
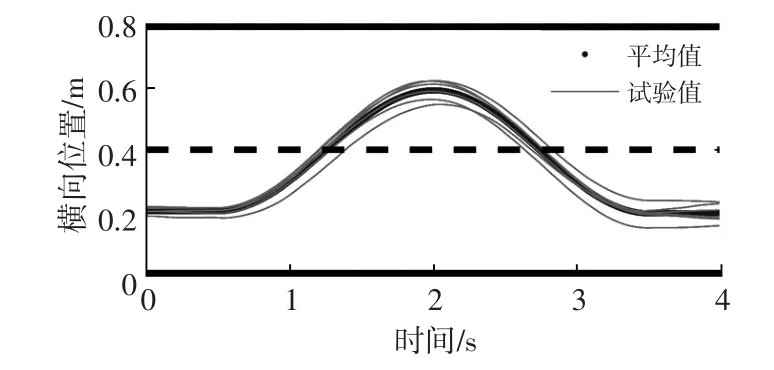
图19 车辆模型运动轨迹试验结果
6 结束语
基于有限状态机理论构建的智能车辆自动驾驶行为决策系统,可将复杂的自动驾驶过程分解为有限个驾驶行为模式,并根据实时虚拟危险势能场进行驾驶行为模式决策,从而实现多车辆道路环境下的自动驾驶功能。
本文构建的三维虚拟危险势能场能够对道路上的实时交通状况进行综合描述和定量评估,通过分析关键位置的危险势能场触发阈值,可为自动驾驶系统的有限驾驶行为状态提供转换执行依据。
本文主要为了验证智能车辆自动驾驶行为决策系统的有效性和安全性,未充分考虑整个道路交通环境下的通行效率和驾乘舒适性,另外,本研究采用的无线通信模式也需要通过实车试验进一步验证。今后的工作将利用车-车、车-路互联技术提高自动驾驶行为决策系统的信息维度以及整个道路的通行能力。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
房地产导刊(2021年8期)2021-10-13
数字技术与应用(2021年4期)2021-06-01
空间电子技术(2021年1期)2021-04-09
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年11期)2019-07-04
高中生学习·高三版(2017年9期)2017-10-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
新高考·高一物理(2015年3期)2015-08-20
