
基于IMM的车辆垂向减振器故障诊断方法研究
2018-12-19 10:50邢璐璐
中国铁道科学 2018年6期
邢璐璐
(中国铁道科学研究院集团有限公司 机车车辆研究所, 北京 100081)
1 引 言
近年来,我国高速铁路快速发展,高速列车的安全保障面临巨大挑战。开展高速列车安全预警与状态监测,是高速铁路可持续健康发展的关键。
减振器是车辆悬挂系统的重要组成部分,其性能直接影响到车辆的运行安全性和舒适性。减振器发生故障后,车辆的振动会明显加剧,严重时甚至会引起螺栓脱落、零部件开裂等问题。引起减振器故障的原因很多,但减振器漏油、橡胶节点失效、减振器性能试验不合格等故障都反映在减振器阻尼的变化上[1-2]。对于一些无法从外观上进行判断的故障,需要拆解减振器来观察或者通过性能试验的示功图才能确定[3-4],这就增加了检修成本。解决这种问题的有效手段是对减振器的状态进行实时监测,提高车辆安全预警能力,并降低检修成本。
目前,很多研究使用基于模型的方法实现铁道车辆悬挂系统的故障诊断。如:英国Loughborough大学的Li P[5]使用Rao-Blackwellised粒子滤波器实现了对铁道车辆横向悬挂系统的参数进行估计;胡依晓[6-7]使用改进的KF方法实现对车辆横向悬挂系统的抗蛇行减振器、2系横向减振器以及1系垂向减振器进行故障诊断与隔离;Jesussek M[8]通过一种混合的卡尔曼滤波器诊断与分离出铁道车辆的非线性悬挂系统的故障。
IMM算法已在航空航天的目标跟踪领域得到了广泛的应用,本文探索将此算法引入到铁道车辆的状态监测及故障诊断领域,以期能够直观地分离出故障发生部位,降低故障误判概率。
IMM算法采用多个卡尔曼滤波器(KF)进行并行处理,每个KF对应1个系统工作中可能出现的状态模型,能有效地对各个模型的概率进行调整,最后通过相应的概率加权融合进行系统状态估计,很好地克服了单个KF估计误差较大的问题[9]。但是,相对于航空航天的单个运动体而言,铁路车辆是1个多体系统,系统模型的维数较高,且振动加速度的采样频率通常高达1 kHz,这就使得计算量大大增加。因此,在铁道车辆状态监测和故障诊断中采用IMM算法需要解决的问题有:(1)建立更高效的动力学模型,减少运算量;(2)对动力学模型进行验证,确保模型的准确度;(3)铁道车辆状态监测领域IMM算法推导及IMM滤波器设计。
2 建立模型
将车辆的纵、横、垂向运动解耦,只考虑车辆的垂向运动。同时,为了降低模型的维度以及求解难度,建立半车辆模型,如图1所示。模型中考虑车体的沉浮运动、构架的沉浮及点头运动和轮对的沉浮运动。
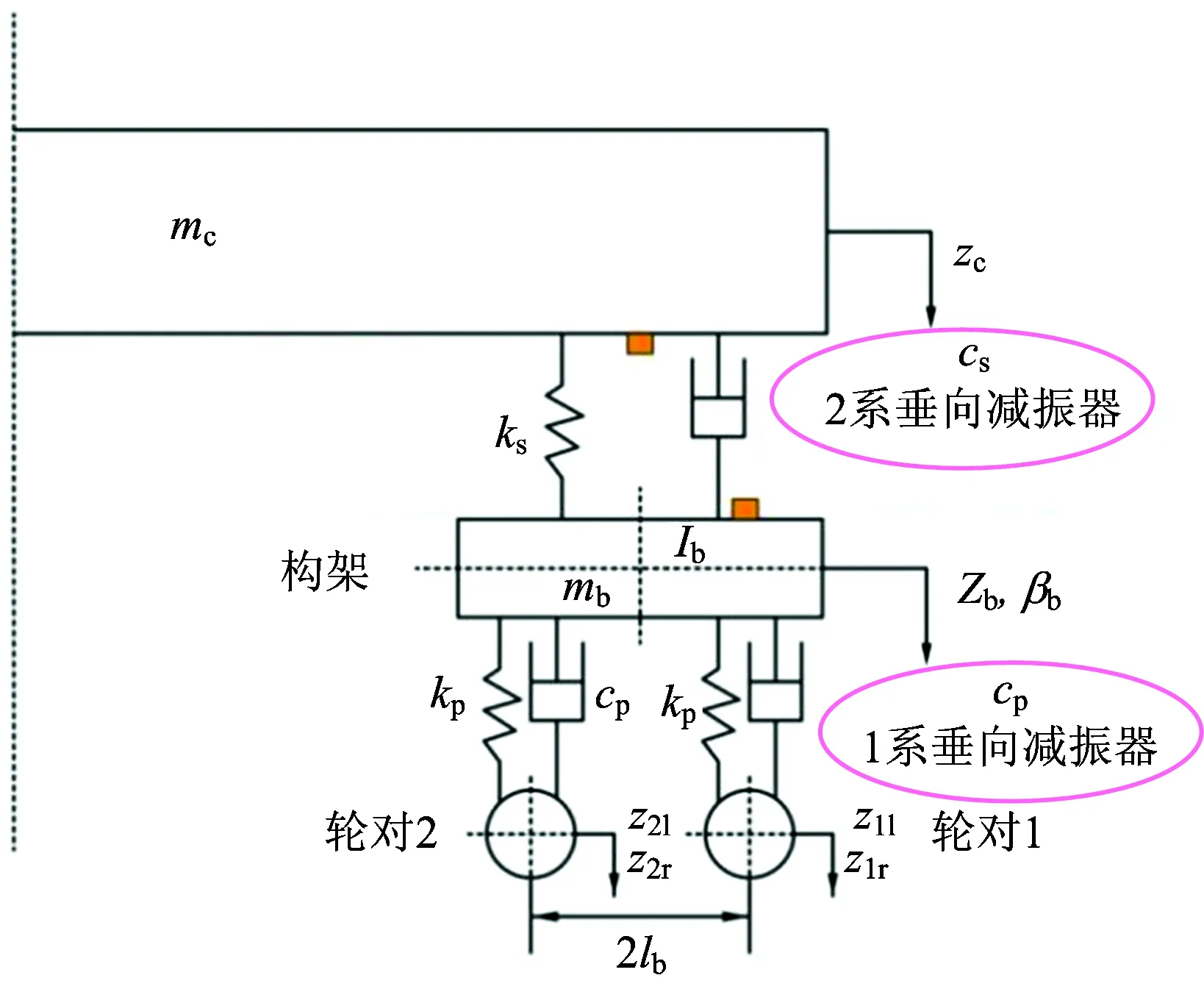
图1 车辆垂向动力学模型
车辆的垂向动力学分析如下。
车体的沉浮运动
(1)
转向架的沉浮运动

(2)
转向架的点头运动

(3)
式中:mc为半个车体质量;mb为构架质量;Ib为构架点头惯量;mw为轮对质量;kp为1系悬挂垂向刚度;cp为1系垂向减振器阻尼;ks为2系悬挂垂向刚度;cs为2系垂向减振器阻尼;zc为车体的垂向位移,zb为构架的垂向位移;βb为构架点头角位移;z1l,z1r为轮对1左侧车轮、右侧车轮的垂向位移;z2l,z2r为轮对2左侧和右侧车轮的垂向位移。
车辆垂向系统的状态空间模型为

(4)
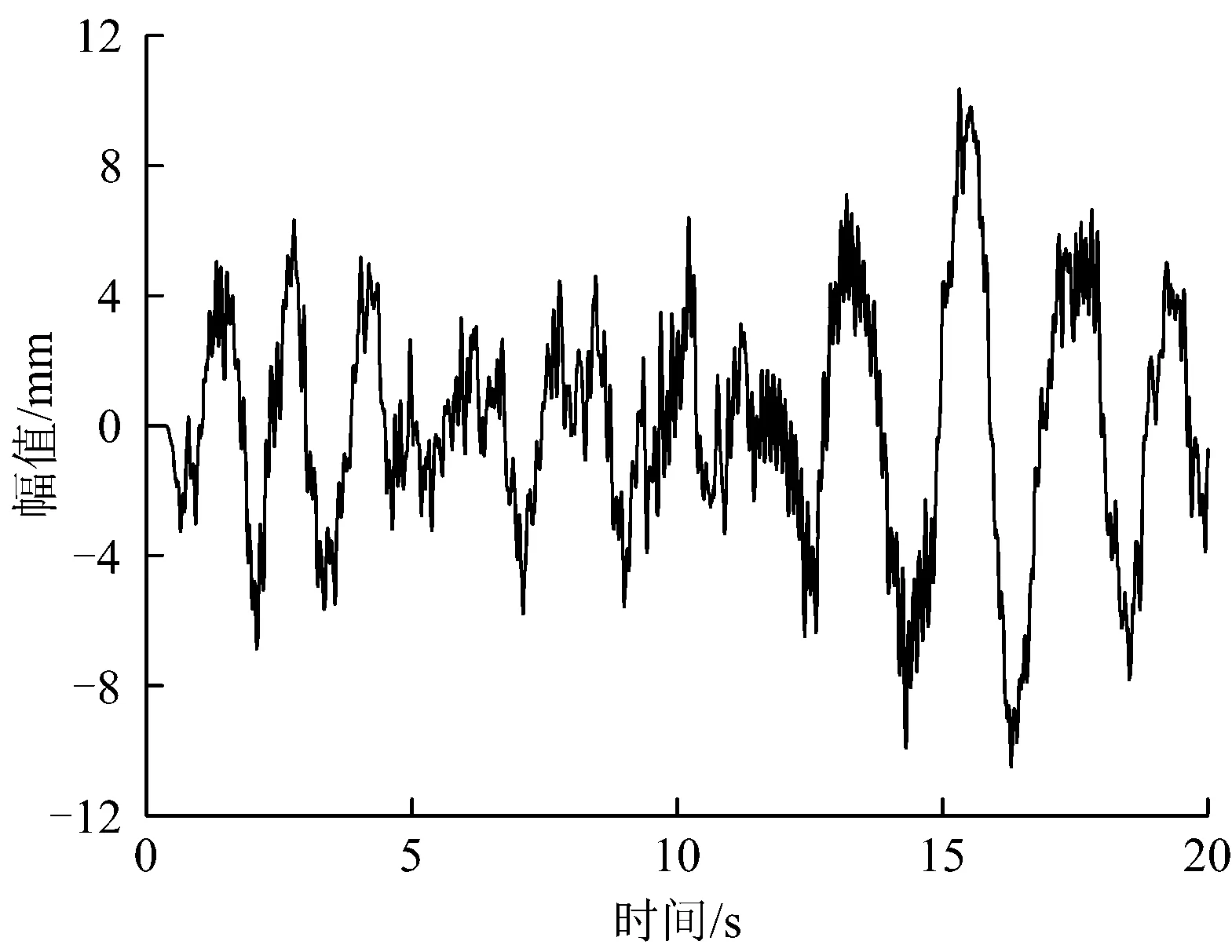
图2 实测左轨垂向不平顺
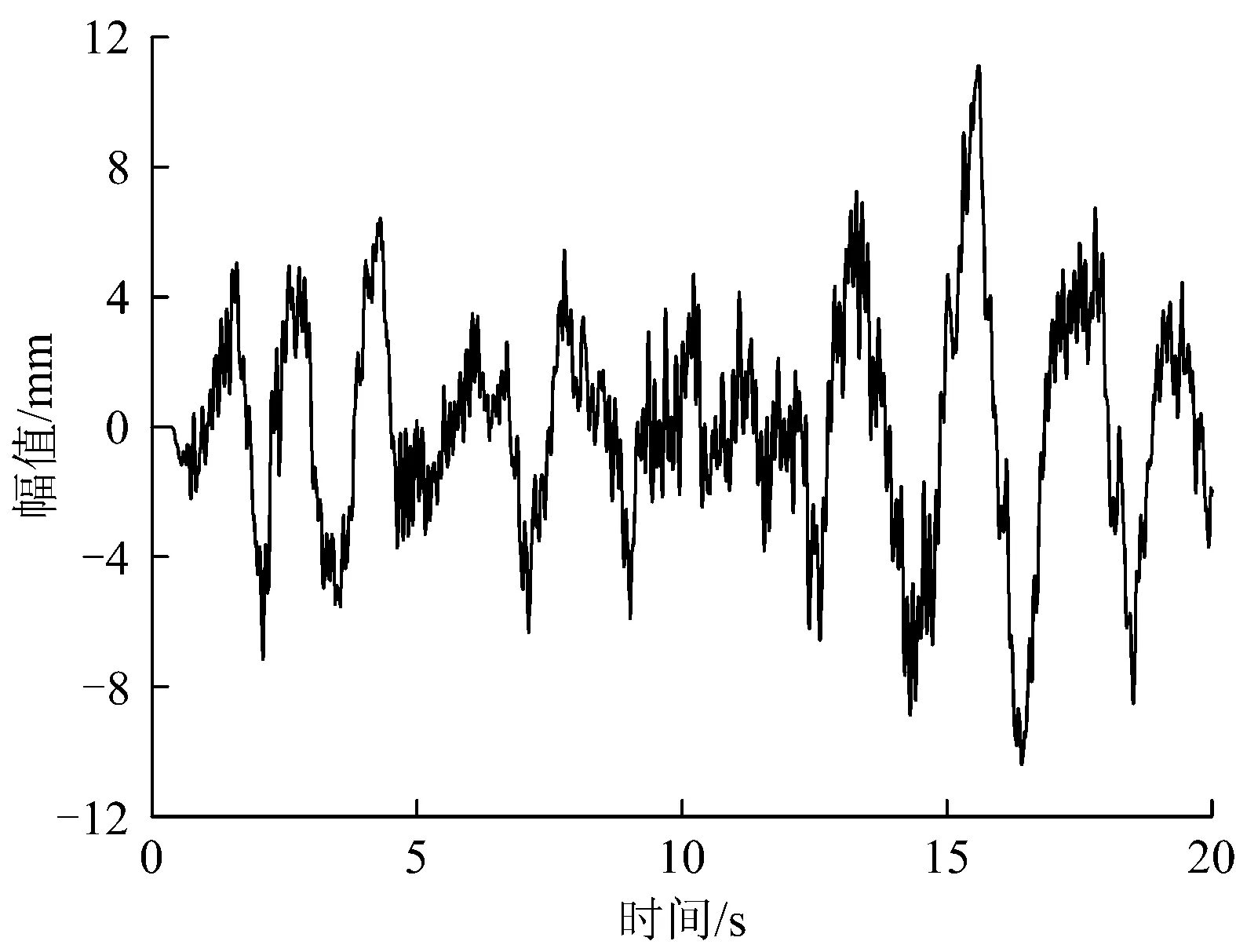
图3 实测右轨垂向不平顺

y=Hx+Lu+v
(5)
式中:H为观测矩阵;观测噪声v为零均值的高斯白噪声,协方差为Qv。
式(4)为连续系统,而通过采样获得的是离散数据,因此,将模型离散化为
x(k+1)=Fx(k)+Du(k)+w(k)
y(k)=Hx(k)+Lu(k)+v(k)
(6)

3 模型验证
模型的正确与否是整个监测的关键,由于模型中的参数较多,维数较高,因此在使用IMM方法对模型进行分析前,需对模型进行验证。本文使用SIMPACK中的后处理结果来进行验证。
对SIMPACK中的车辆模型,在导向转向架中心上方的车体上、1位轮对的右侧轴箱上方的构架上安装加速度传感器,加载垂向的线路不平顺,得出车辆的动力学仿真结果。在SIMPACK的仿真后处理结果中,可以直接得出状态向量x以及车体前端垂向振动加速度、构架垂向振动加速度、构架点头加速度随时间的变化历程。由于线路的垂向不平顺ut也是已知的,因此,通过式(1)和(3),来验证模型中矩阵A和G。车体前端的垂向振动加速度以及构架的点头加速度验证分别如图4、图5所示。

图4 车体前端垂向振动加速度
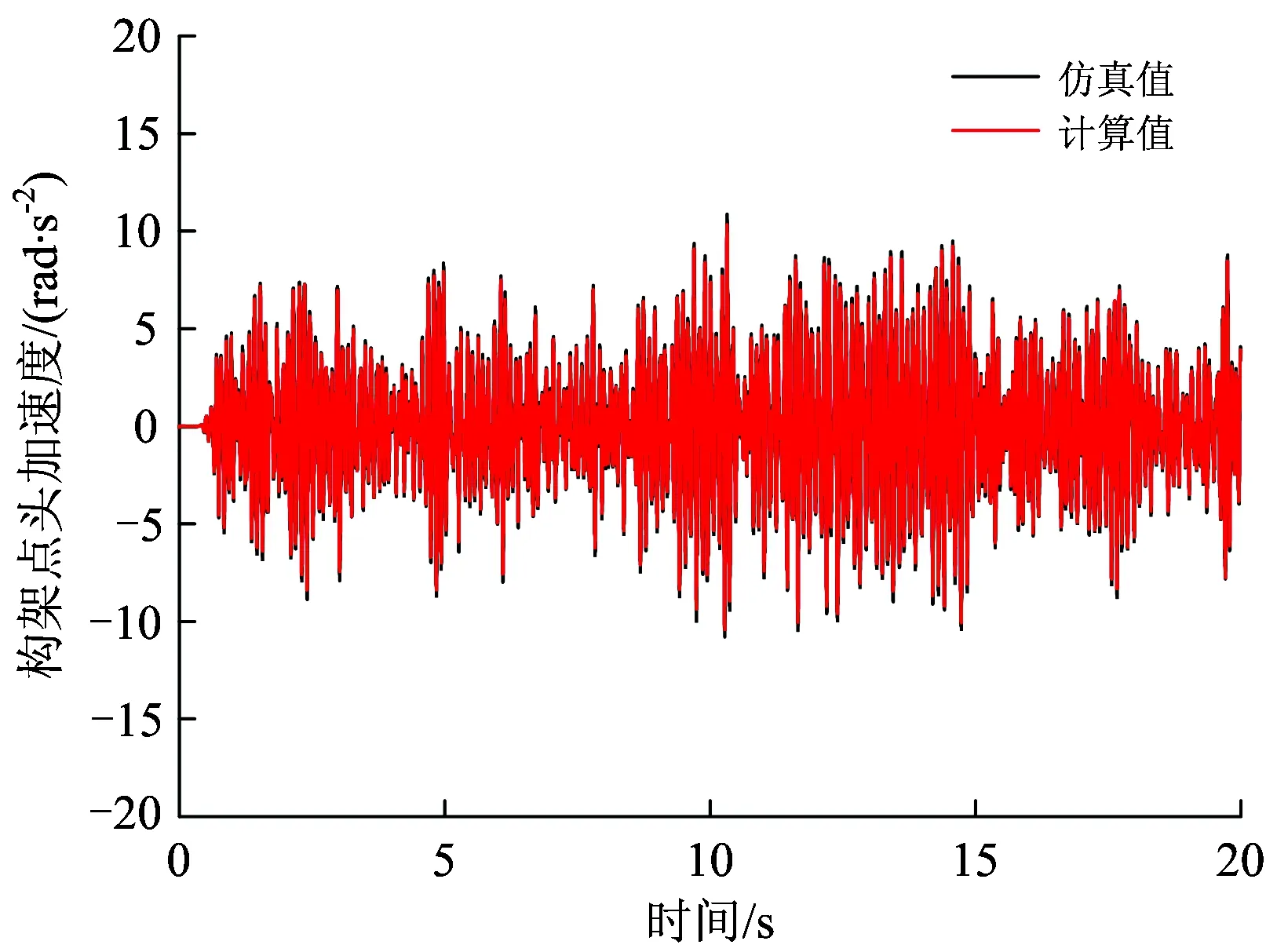
图5 构架点头加速度
验证结果表明,车体前端的垂向振动加速度、构架点头加速度的仿真值与计算值相位相同,数值上有微小差异,这是由于建立的垂向模型未考虑车辆的侧滚运动,以及车辆发生侧滚后横向运动的影响。
4 IMM算法
IMM算法的基本原理是每一时刻,假设某个模型在当前时刻有效的条件下,通过混合前一时刻所有滤波器的状态估计值来获得与这个特定模型匹配的滤波器的初始条件,然后对系统每个模型并行运算预测与校正,最后,以模型匹配似然函数为基础更新模型的概率,并组合所有滤波器修正后的状态估计值(加权和)以得到状态和参数估计。
假定系统有m种模型,则第j个模型的状态空间模型为
(7)
观测模型为
yk=Hkxk+Luk+vk
(8)
IMM算法的步骤如下。

(2)模型i到j的混合概率
(9)

(10)
(3)模型j的混合状态估计
(11)
(4)模型j的混合协方差估计

(5)模型j的一步预测
(13)
(14)
(6)模型j的校正
(16)
(17)
(7)模型j的概率更新
模型j的似然函数为
(18)
其中,
模型j的概率
(19)
(8)输出交互
总的状态估计
(20)
总的协方差估计

(21)
参数的估计
(22)
使用IMM方法,可以通过模型的概率以及最终的参数估计值对车辆的状态进行监测。
5 垂向减振器的状态监测
车辆运行过程中,在线路的不平顺ut的激励下,车辆系统会产生一定的振动响应yt,如图6。通常,从安装在车辆上的加速度传感器来采集车辆的振动响应数据yt。另外,将线路的不平顺ut以及测量到的振动加速度yt作为状态监测系统的输入,并给定初始值,通过IMM滤波器对车辆的垂向模型进行仿真估计。
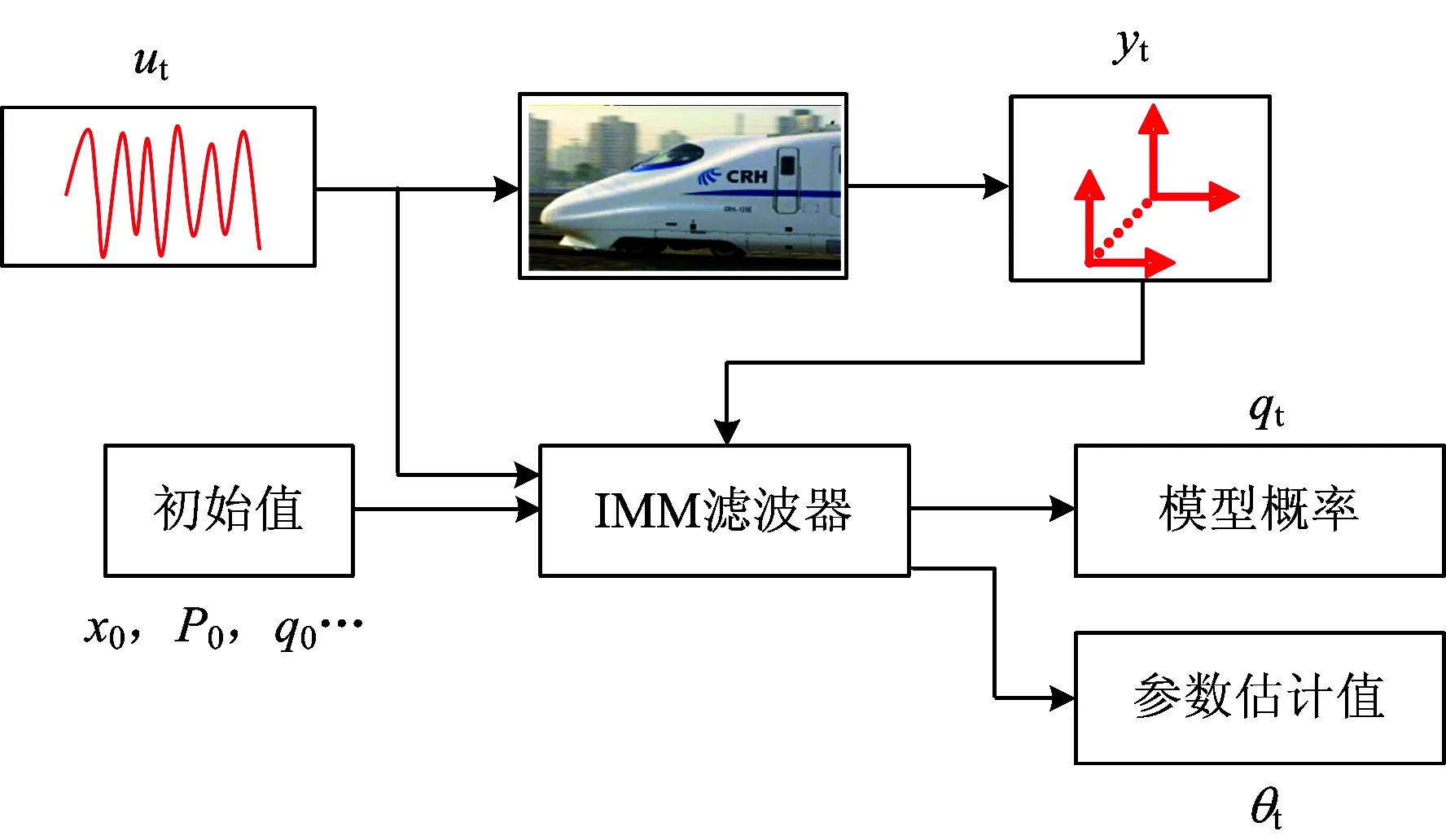
图6 车辆系统状态监测的IMM滤波器
5.1 2系垂向减振器的状态监测
图7为不同2系垂向减振器阻尼下的车体、构架前端的垂向振动加速度,从图中可以看出2系垂向减振器阻尼大小对车体前端的垂向振动加速度影响较大,对构架前端的垂向振动加速度影响较小。但是,单从车体和构架前端的垂向振动加速度上很难判断出2系垂向减振器的故障。另外,当阻尼为20和12 kN·s·m-1时,车体前端的垂向振动加速度相差很小。为了验证IMM算法能否识别出阻尼的变化,建立2系垂向减振器故障工况,在9~11 s之间,2系垂向减振器阻尼从20 kN·s·m-1变化到12 kN·s·m-1。
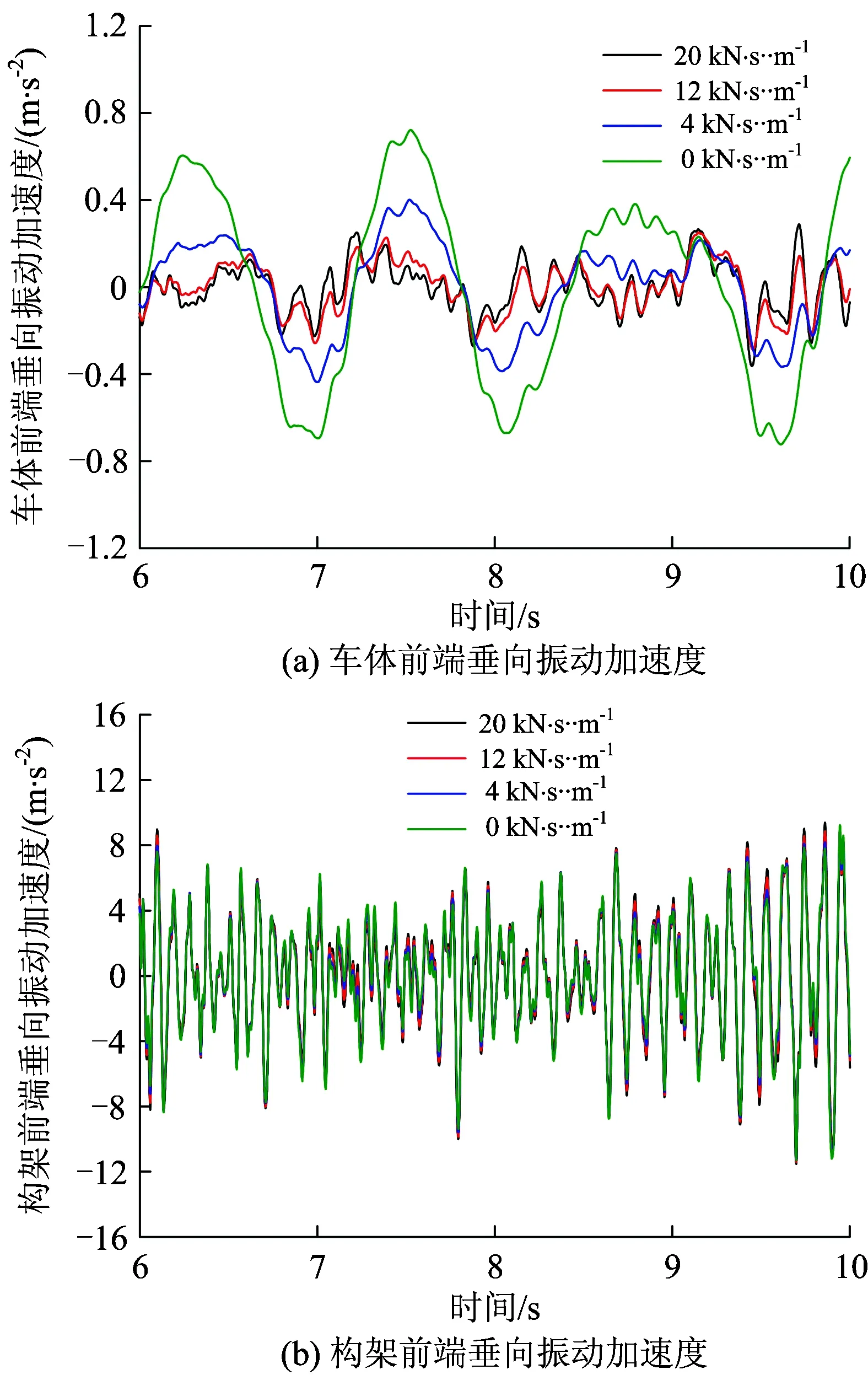
图7 车辆的垂向振动响应
使用IMM滤波器对于2系垂向减振器的状态监测,基于以下4个模型:
模型1:车辆无故障;
模型2:2系垂向减振器失效(阻尼减少40%);
模型3:2系垂向减振器失效(阻尼减少80%);
模型4: 2系垂向减振器失效(阻尼减少100%)。
给定初始的模型概率q、初始的状态向量x0及其协方差矩阵P0,马尔可夫概率转移矩阵p1。使用IMM算法估计出的模型概率如图8所示,其中不显示接近于0的模型概率。可以看出,在11 s附近时,模型1的概率从1变为0,而模型2的概率从0变成1。2系垂向减振器阻尼估计值也在11 s附近从20 kN·s·m-1变为12 kN·s·m-1,如图9所示。
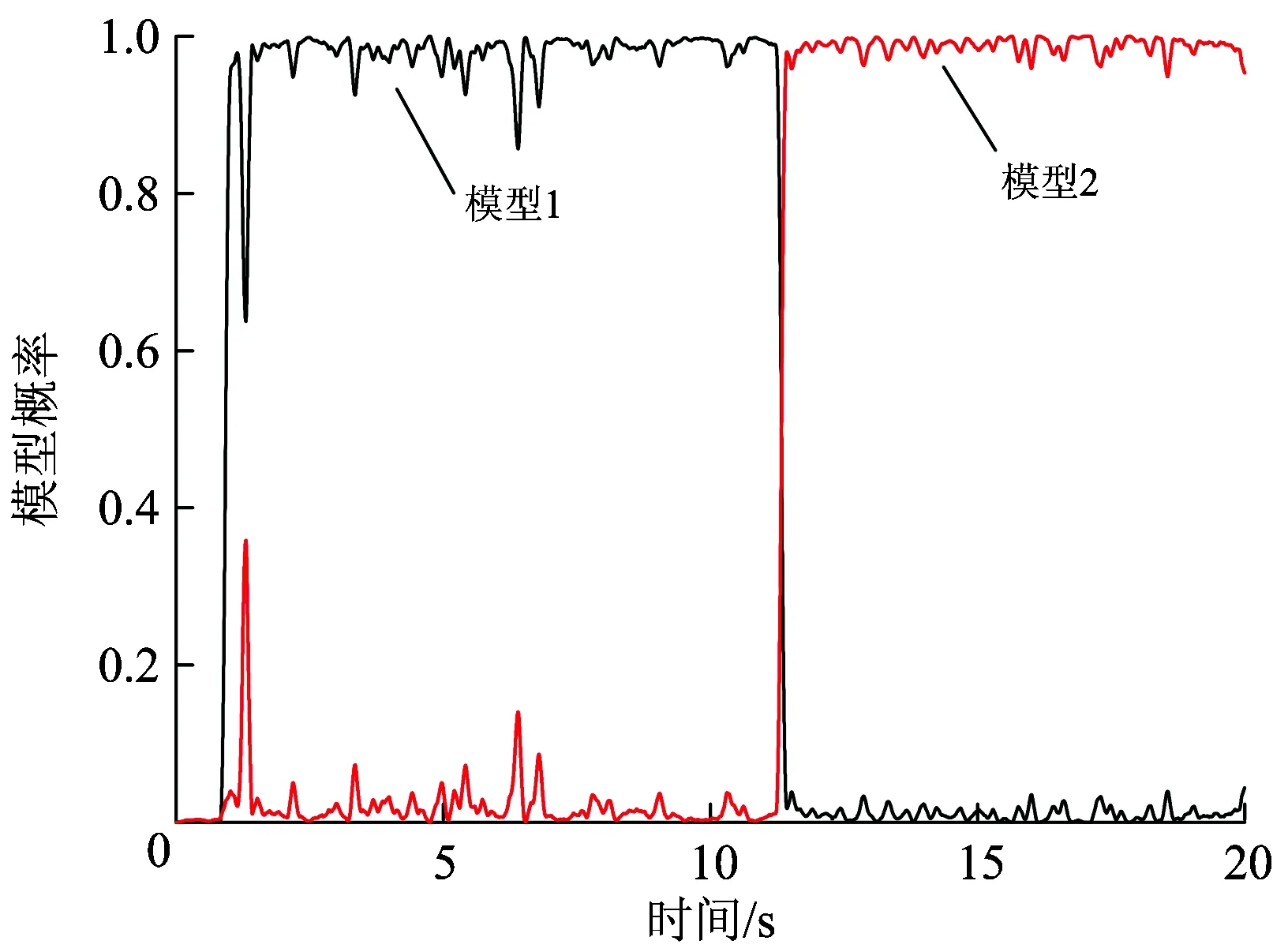
图8 模型概率
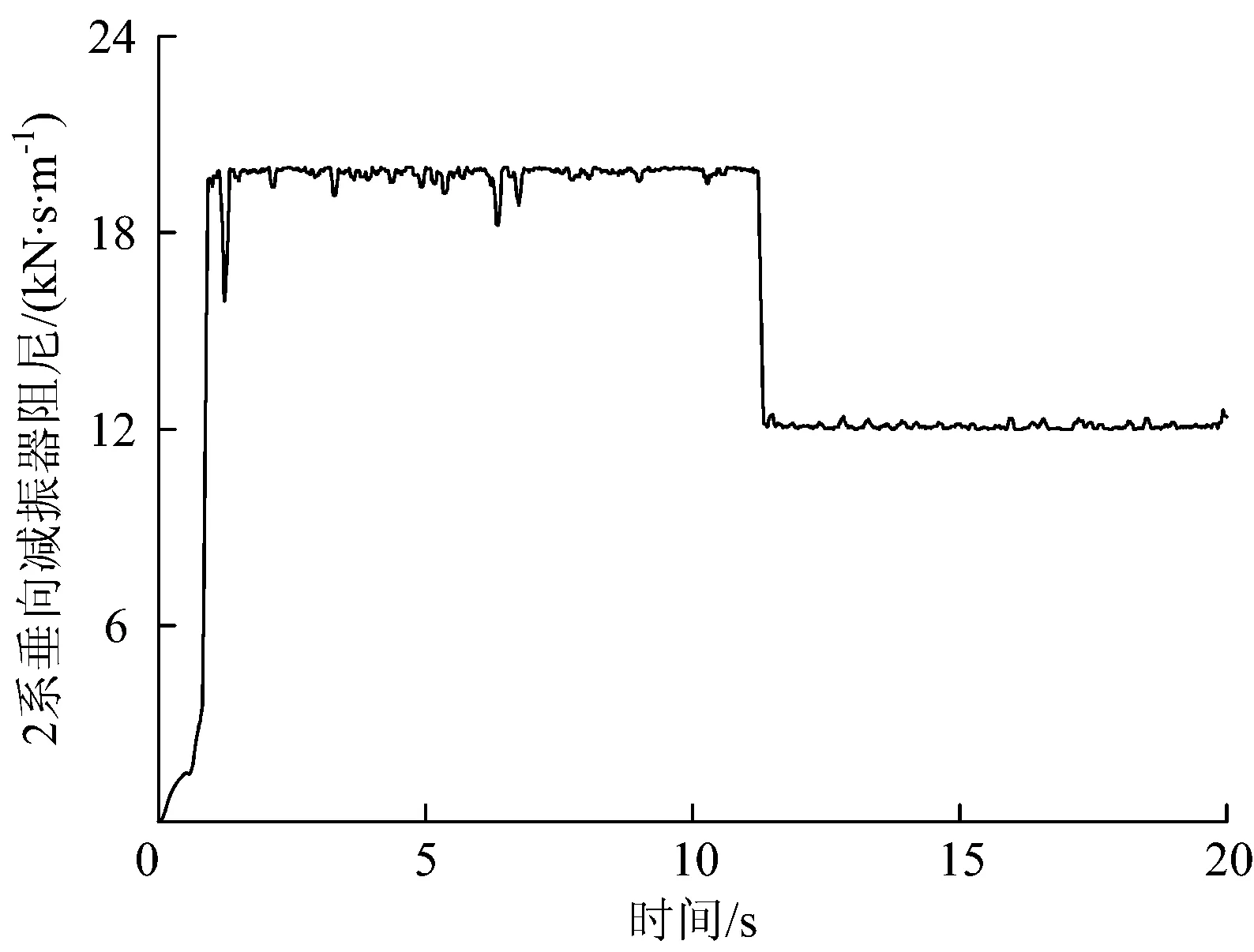
图9 阻尼估计值(概率转移矩阵p1)
相较于单个卡尔曼滤波器(KF)来说,IMM算法中增加了各个模型的转移过程,其中马尔可夫概率转移矩阵决定了估计的精度。为了验证概率转移矩阵对估计结果的影响,保持其它输入不变,给定马尔可夫概率转移矩阵p2,即增加模型1和模型2的转移概率p12,p21,那么模型1和2本身的概率p11,p22就会降低,计算结果如图10所示。与图9相比较,可以看出,当模型自身概率降低时,估计的精度会降低。
上面所使用的马尔可夫状态转移矩阵p1,p2为
式中:s=1/300,k=7/2 000。
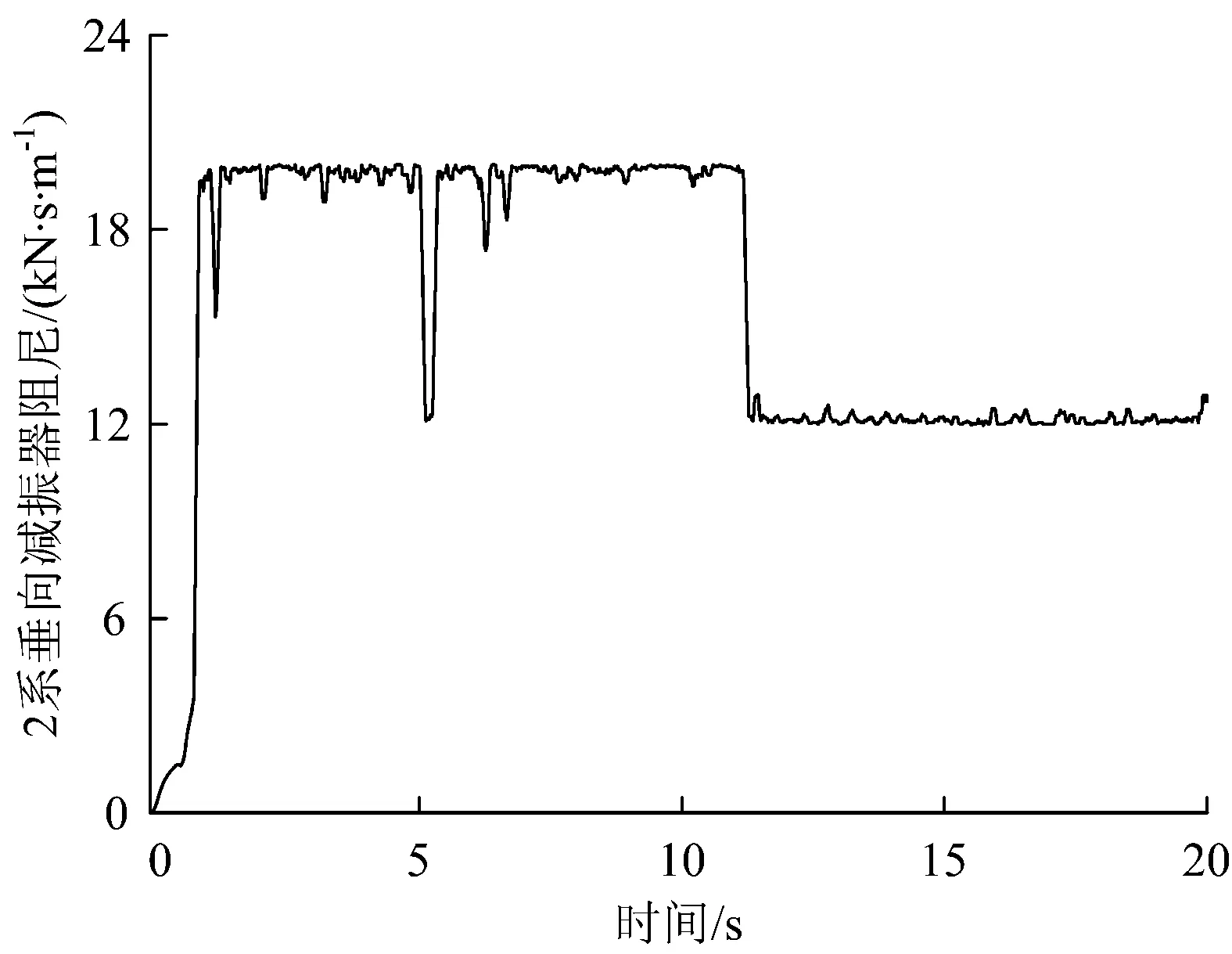
图10 阻尼估计值(概率转移矩阵p2)
5.2 1系垂向减振器的状态监测
对于1系垂向减振器的状态监测基于以下4个模型:
模型1:车辆无故障;
模型2:1系垂向减振器失效(阻尼减少40%);
模型3:1系垂向减振器失效(阻尼减少80%);
模型4:1系垂向减振器失效(阻尼减少100%)。
为了监测1系垂向减振器的状态,模拟减振器的阻尼随着时间发生变化,如图11所示。仿真1系垂向减振器阻尼发生变化时,车体前端的垂向振动加速度如图12(a)所示,构架前端的垂向振动加速度如图12(b)。1系垂向减振对构架的垂向振动加速度影响较大,但在阻尼减少40%和80%的情况下,构架垂向振动加速度的差异并不明显。因此,从车体的垂向振动加速度和构架的垂向振动加速度上很难判断出1系垂向减振器的状态。
给定初始的模型概率q、初始的状态向量x0及其方差矩阵P0,给定模型转移矩阵p1,使用IMM方法估计出的1系垂向减振器阻尼值,如图13所示。
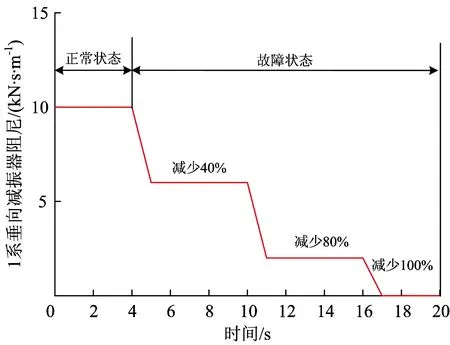
图11 1系垂向减振器阻尼变化
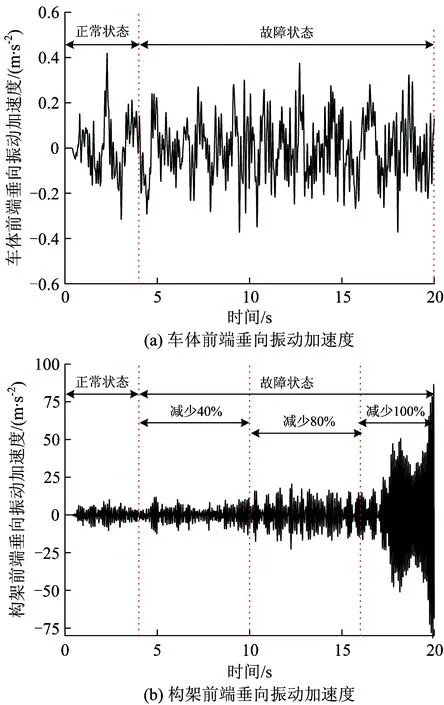
图12 车辆的垂向振动响应
从图13中可以看出,当1系垂向减振器阻尼发生变化时,IMM算法能够较好地估计出1系垂向减振器的阻尼值,能够实现减振器状态的在线监测功能。当减振器阻尼发生变化时,估计出的阻尼值存在1 s左右的延迟性,这是由于IMM算法中各模型的马尔可夫概率转移较小,各模型的转移较慢,因此存在一定的延迟。
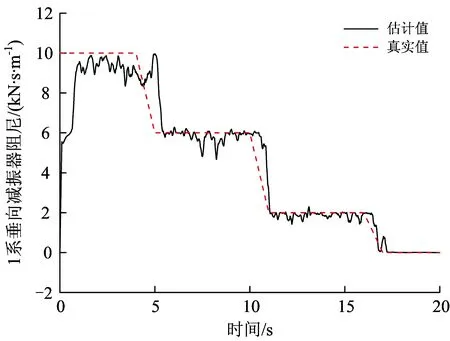
图13 1系垂向减振器阻尼
本文给出了1系、2系垂向减振器的状态监测的IMM算法。另外,还可以通过建立不同的模型,对1系、2系悬挂的垂向刚度进行监测,本文不再阐述。
6 结 论
本文通过分析垂向半车动力学模型,建立了车辆垂向系统的状态空间模型,并以车体、构架前端垂向振动加速度作为垂向系统观测量,建立了车辆垂向系统的观测模型。通过动力学仿真可以得出,2系垂向减振器阻尼对车体垂向振动加速度影响较大,而1系垂向减振器阻尼对构架的垂向振动加速度影响较大。通过IMM算法,实现了车辆1系、2系垂向减振器的状态监测,且能够快速定位故障发生的时间,并直观地判断减振器的失效程度。此外,在IMM算法中,模型的马尔可夫概率转移矩阵直接影响到估计的精度,在延迟和估计精度之间需要有一个权衡,因此还需要多次仿真来确定马尔可夫概率转移矩阵。
猜你喜欢
军民两用技术与产品(2021年1期)2021-07-28
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
建材发展导向(2021年7期)2021-07-16
数学物理学报(2021年2期)2021-06-09
中华养生保健(2020年3期)2020-11-16
铁道通信信号(2020年6期)2020-09-21
北方工业大学学报(2019年5期)2019-03-30
电子制作(2018年17期)2018-09-28
中华诗词(2018年1期)2018-06-26
