三轴磁传感器分量误差两步校正方法
2018-12-10 08:55张德文田武刚潘孟春万成彪刘中艳
传感技术学报 2018年11期
张德文,张 琦,田武刚,潘孟春,万成彪,刘中艳
(国防科技大学智能科学学院,长沙 410073)
三轴磁传感器能同时获得磁场的总量和分量信息,在磁探测系统中常被用来测量磁场分量、分量梯度和梯度张量,在军事反潜、地球物理勘探、空间磁场测量、工业检测等领域具有重要应用[1-3]。受加工工艺和安装工艺水平的限制,三轴磁传感器的3个轴并不严格正交,各轴存在零点漂移,且灵敏度也不完全相同,使得磁场总量和分量测量值都与实际值存在较大误差[4-6]。为了获得高精度、高可靠性的磁场测量值,必须对三轴磁传感器进行误差校正[7-9]。
三轴磁传感器误差校正问题一直以来都受到众多学者的关注[10-13]。理想情况下,三轴磁传感器的理论输出值可构成标准圆球面,而由于存在制造误差,圆球面畸变成原点平移的椭球面,因此,通过求解椭球参数实现三轴磁传感器校正是一种常用方法[14],但是传统的椭圆拟合算法在校正过程中只关注磁场总量的校正效果,没有给出明确的从椭球参数求解三轴磁传感器测量模型参数的方法,因此无法保证磁场分量的校正效果。与磁场总量相比,磁场三分量含有更多的磁场信息,具有重要应用价值,因此三轴磁传感器分量校正的研究具有重要意义。
本文首先对三轴磁传感器的测量误差来源进行简要分析,。之后利用两步校正方法实现三轴磁传感器测量误差校正:第一步,建立三轴磁传感器测量误差模型,利用椭球拟合算法求解中间参数,第二步结合测量误差模型对中间参数进行解耦,得到测量误差模型的具体参数,从而实现三轴磁传感器磁场总量和分量的校正。最后通过仿真和实验验证了所提方法的正确性和有效性。

图1 三轴磁传感器测量误差示意图
1 测量误差模型
如图1所示,三轴磁传感器测量误差主要来源为三轴非正交,刻度因子不一致以及零偏误差。综合考虑单轴测量误差以及轴间测量误差,可以得到三轴磁传感器测量误差模型如下所示:
Hm=MkMoH+b+n=MH+b+n
(1)
式中:Hm=[HmxHmyHmz]T为三轴磁传感器实测三分量,H=[HxHyHz]T为磁场真实三分量值,b=[bxbybz]T为三轴磁传感器的零偏误差。n为三轴磁传感器测量噪声,可通过取平均的方式消除。Mk为刻度因子误差矩阵,表示为
(2)
kx、ky、kz为各轴的刻度因子。Mo为三轴非正交矩阵,表示为
(3)
α、β、γ为非正交角,其定义如下:设标准正交坐标系的3个轴为OX、OY、OZ,三轴磁传感器的3个轴为OXs、OYs、OZs,其中OZ与OZs重合,XsOZs与XOZ共面,α为OXs轴与OX轴的夹角,γ为轴OYs与面XOY的夹角,β为轴OYs在面XOY上的投影与轴OY的夹角。
根据式(1),可得三轴磁传感器的校准模型为
H=M-1(Hm-b-n)
(4)
当三轴磁传感器在磁场总量为定值的区域内改变姿态时,理想测量分量H的轨迹应保持在一个球面上,而由于受到测量误差的影响,三轴磁传感器实测分量Hm的轨迹将保持在某个椭球面上,只要求出此椭球的各个参数即可根据式(4)对实测数据进行修正,此椭球可表示为
(5)

2 两步校正法
根据以上三轴磁传感器测量误差模型和校准模型的分析,提出三轴磁传感器分量误差的两步校正方法。第一步利用椭球拟合算法实现椭球参数的求解;第二步结合实际测量误差模型对椭球参数进行解耦,目的是得到测量误差模型参数,从而实现分量误差校正。
2.1 椭球参数求解方法
由于椭球曲面是一种二次曲面,因此可将式(5)展开为三维空间里的二次曲面方程,表示为
F(p,Hm)=a(Hmx)2+b(Hmx)(Hmy)+c(Hmy)2+
d(Hmx)(Hmz)+e(Hmy)(Hmz)+j(Hmz)2+
p(Hmx)+q(Hmy)+r(Hmz)+s=0
(6)
式中:p=[abcdejpqrs]T为椭球参数。在获取恒定磁场条件下三轴磁传感器多姿态下的测量值Hmi(i=1,2,…,N)后,椭球参数求解的问题可转化为最小化算术距离平方和的问题。也即求解使下式取得最小值的参数p。
D(p)=(Sp)T(Sp)=pTSTSp
(7)
要保证由系数向量p构成的二次曲面为椭球面,矩阵A须是正定或负定的,则
(8)
不等式约束下的极小值问题难以求解,因此将其化为等式约束并用矩阵表示,得:
pTCp=1
(9)

用拉格朗日法对极小值进行求解,得
L(p)=pTSTSp-λ(pTCp-1)
(10)
对上式求偏导,并令其为0得
(11)
求解过程中暂时不考虑(a+c)det(A)>0,故只需求解STSp=λCp,此式是一个广义特征系统,可求解出其10个广义特征值和广义特征向量(λi,pi)(i=1,2,…,10),注意到
(12)
此式说明,对于某一组实测值,它们相对于以特征值λi对应的特征向量μipi为系数的椭球面的距离函数的值就是特征值λi。因此要从10组特征向量中找到能使对应被优化函数即距离函数的取最小值的一组,只要选取对应于最小正特征值的那组特征向量即可,此特征向量即为所求的椭球参数。
2.2 模型参数求解方法
求得椭球的10个参数之后,即可求得矩阵A和零偏b。其中,
(13)
(14)
将矩阵A进行分解,可找到一个满足条件A=(M-1)TM-1的矩阵M。将最终所得参数(M,b)代入式(4)即可实现三轴磁传感器的总量校正。在椭球拟合算法中,利用椭球拟合法求解得到矩阵A后,通常对A进行奇异值分解得到矩阵M,这种分解方式对总量校正效果没有影响,但却无法实现三轴磁传感器的分量校正,很大程度上制约了磁场分量信息的应用。而且通过简单的奇异值分解,得到的矩阵M为对称阵,无法根据M进一步求解出三轴磁传感器测量误差模型的具体参数,从而无法对三轴磁传感器的非正交性、刻度因子误差以及零偏误差进行评价。通过研究发现,在已知三轴磁传感器的测量误差模型的条件下,通过解析式分解的方法将矩阵A分解得到矩阵M,这种分解方式得到的矩阵M具有唯一性,既不响应三轴磁传感器的总量校正效果,又能实现三轴磁传感器的分量校正。具体分解方式推导如下。
由式(1)知
(15)
则
(16)
式(16)中,
则
A=(M-1)TM-1
(17)
因为三轴磁传感器的3个非正交角绝对值都很小(小于1°),故有
m11>0,m22>0,m33>0
(18)
则根据式(17)可得
求解得M-1之后,求逆则可得到M,设
(19)
则根据式(13)可得
根据以上推导,可实现矩阵A的解析式分解,从而对椭球参数进行解耦,得到与实际测量误差模型相对应的矩阵M,将M代入式(4),即可实现三轴磁传感器的分量校正。根据M得到三轴磁传感器的实际参数α、β、γ、kx、ky、kz,再结合零偏误差b即可对三轴磁传感器的整体性能进行评价。
3 仿真及实验分析
3.1 仿真分析
为验证本文所提出的三轴磁传感器测量误差校正方法的正确性和有效性,首先利用仿真数据对算法进行分析。在仿真分析中,磁场模值设置为48 000 nT,三轴磁传感器测量误差模型的各参数设置如表1所示。

表1 模型参数设置
据表1可得
由于非正交角较小,故M中对角线元素与表1中刻度因子相同。
图2为仿真产生的磁场三分量真值,图3为三轴磁传感器各轴的实际输出值与理想值的误差,其中图3(a)为分量测量误差,图3(b)为总量测量误差。
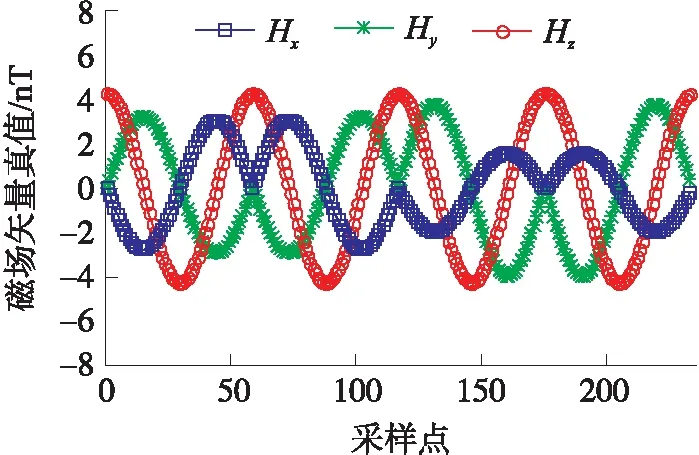
图2 磁场分量真值
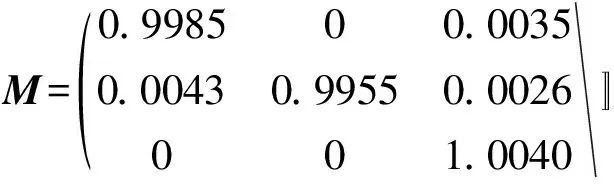
利用椭圆拟合算法求解得矩阵A和分量b之后,用奇异值分解和本文所提出的解析式分解对A进行分解,可得到矩阵M1和M2。矩阵A、M1和M2的具体参数为:
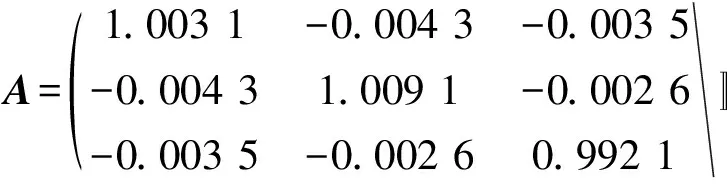

图3 测量误差
对矩阵M2进行解析式分解可得三轴磁传感器的非正交角参数和刻度因子参数,仿真求解得到的测量误差模型参数如表2所示。
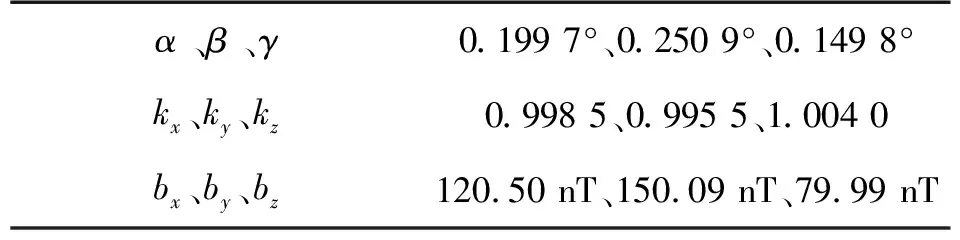
表2 模型参数求解结果
根据矩阵M2的求解以及表1和表2中模型参数的对比可知,文中提出的方法能求解出与测量误差模型相对应的矩阵M,且能求解出三轴磁传感器的刻度因子和非正交角。
利用求解的M1和M2对三轴磁传感器进行校正,校正结果如图4。图4(a)、图4(b)、图4(c)为使用传统的椭球拟合法与本文提出的两步校正法分别对三轴磁传感器输出分量进行校正的结果,可以看出,使用文中提出的解析式分解算法能将准确的求解出与测量误差模型对应的矩阵M,从而能够将磁场三分量校准到预期的正交坐标系下,而使用奇异值分解则将磁场三分量一个未知的正交坐标系下。图4(d)为使用两种方法对三轴磁传感器输出模值进行校正的结果,可以看出使用解析式对矩阵A进行分解,不影响磁场模量的校正效果。
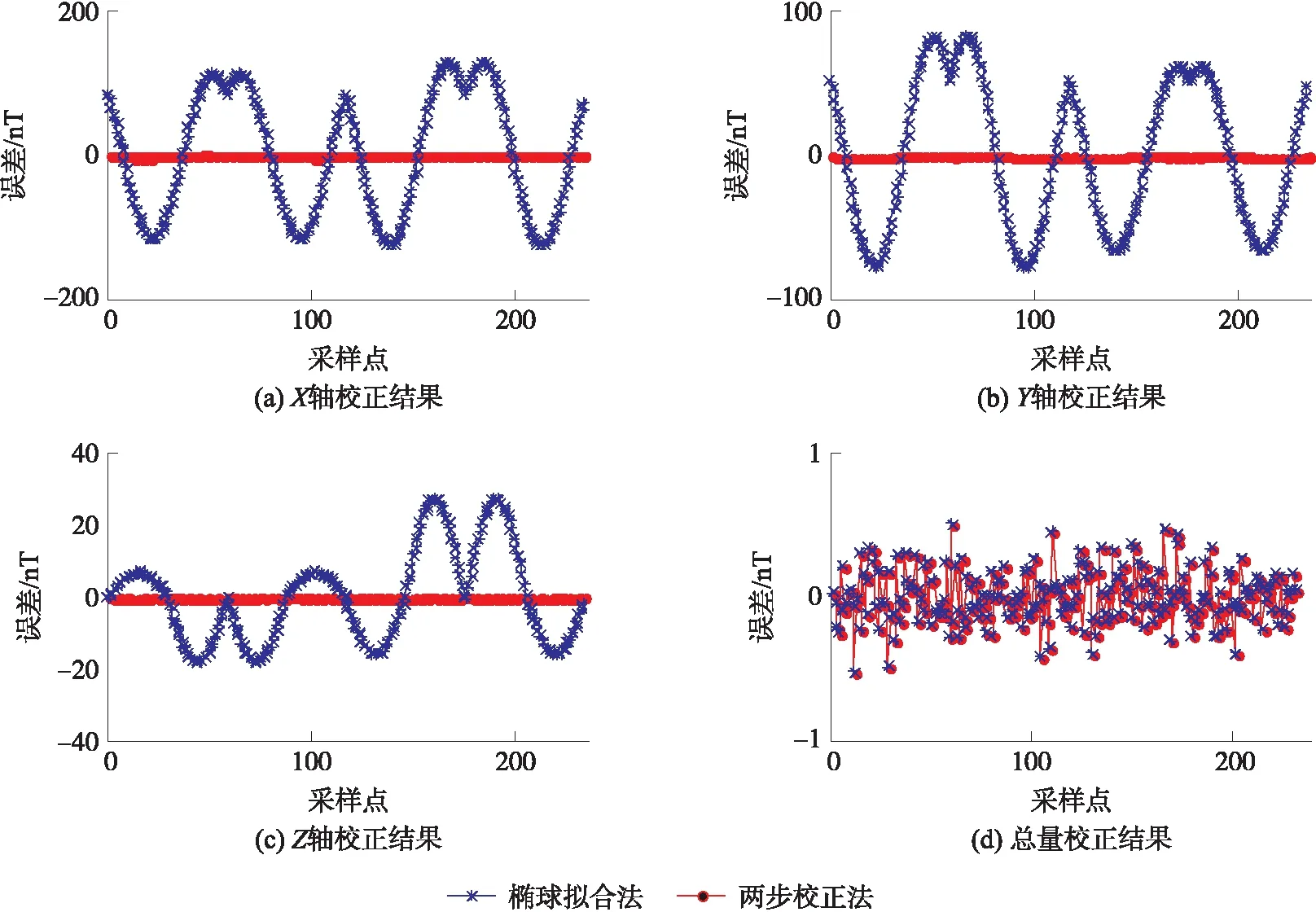
图4 仿真校正结果
3.2 实验验证
三轴磁传感器误差校正实验需在磁场环境洁净的区域进行,因此,实验过程中首先利用图5所示的高精度质子磁力仪对环境磁场进行测试,选取出一块磁场梯度小于0.1 nT/m的区域开展实验,并测量得到该实验区域的磁场模值为48 701.3 nT。

图5 实验场地选择
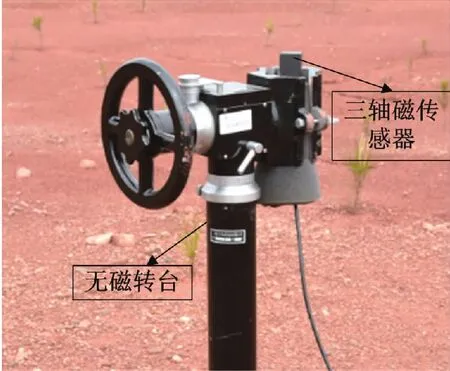
图6 多姿态测量数据获取
选择好实验场地后,在该区域将三轴磁传感器安装在无磁转台上(图6),本实验使用的三轴磁传感器具体型号为HS-MS-FG3LN_100,其正交度小于0.2°。通过转动无磁转台改变三轴磁传感器的姿态,获取三轴磁传感器在多个姿态下的测量数据。试验中获取的三轴磁传感器测量数据如图7所示。

图7 三轴磁传感器实测数据
图7(a)和图7(b)分别为测量数据的分量输出值和总量输出值。利用文中提出的算法对实验数据进行校正,求解得三轴磁传感器测量误差模型参数如表3所示。将所得参数代入三轴磁传感器校准模型,得校正效果如图8所示。

表3 三轴磁传感器模型参数
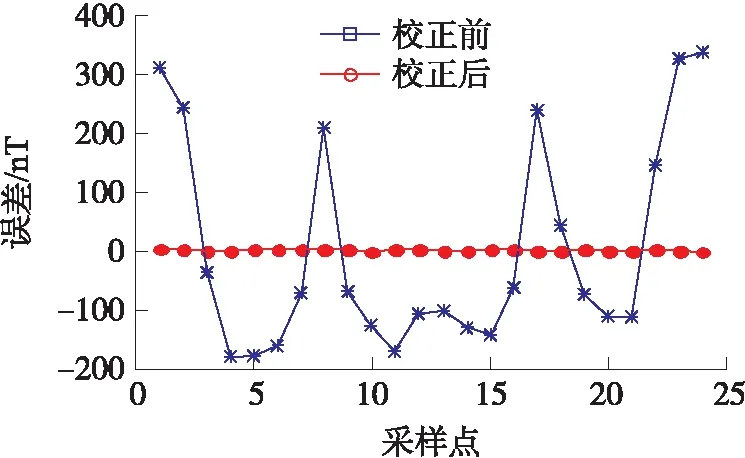
图8 实验较正结果
为对所求参数的适用性进行验证,试验中获取一组测量数据作为验证数据,用所求参数对其进行校正,校正效果如图9所示。
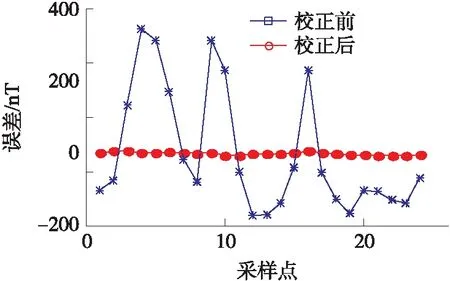
图9 验证数据校正效果
从表3可以看出,利用两组数据估计出的模型参数具有较好的一致性,说明文中提出的算法,能够求解出三轴磁传感器的具体模型参数,据此我们能根据实际应用中三轴磁传感器坐标系的位置得出较正后磁场三分量所属坐标系的实际位置。图8中,三轴磁传感器数据总量测量误差的标准差从校正前的178.7 nT变为1.3 nT。图9中,验证数据总量测量误差的标准差从校正前的171.5 nT变为4.1 nT。从校正效果可以看出,文中所提的算法能有效实现三轴磁传感器的测量误差校正。
4 讨论
①通过仿真分析中三轴磁传感器测量误差模型参数求解情况,与椭球拟合算法相比,本文提出的方法能够准确求解出三轴磁传感器各个误差项的具体量值,从而能够对三轴磁传感器的整体性能评估提供依据。
②如图4所示,椭球拟合算法虽然能实现三轴磁传感器总量测量误差校正,但校正后的磁场分量是在一个未知的正交坐标系下。利用文中提出的两步校正方法,不仅能实现总量误差校正,而且能够明确校正后的磁场分量所属的正交坐标系,这对磁场分量的应用具有重要意义。
③由于实验条件限制,文中实验部分只对总量测量误差的校正效果进行了验证。如需对磁场分量误差校正效果进行验证,需结合惯导获取三轴磁传感器真值。但是在实验中,传感器坐标系是已知的,求解出测量误差模型参数后,根据非正交角对传感器系Z轴方向即可得到校正后磁场分量所在正交坐标系,因此,与椭球拟合算法相比,校正后的磁场分量仍是有利用价值的。
5 总结
针对传统的椭球拟合算法没有对三轴磁传感器校正后的磁场三分量进行深入分析的问题,本文提出了一种三轴磁传感器分量误差的两步校正算法,与传统的椭球拟合算法相比,该算法即能实现三轴磁传感器总量测量误差的校正,又能实现磁场分量的校正,明确校正后所得磁场三分量所属的正交坐标系,且能够求解出实际误差模型参数,对磁场三分量信息的应用以及三轴磁传感器性能评估具有重要价值。仿真分析和实验验证说明了所提算法的正确性和有效性。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
智能制造(2021年4期)2021-11-04
国学(2020年1期)2020-06-29
应用数学(2020年2期)2020-06-24
制造技术与机床(2017年9期)2017-11-27
北京航空航天大学学报(2017年3期)2017-11-23
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
探测与控制学报(2015年4期)2015-12-15