立方星用微型太阳敏感器设计*
2018-12-10 08:55查杨生陆正亮陶红海钱鹏俊
传感技术学报 2018年11期
查杨生,陆正亮,张 翔,陶红海,钱鹏俊
(南京理工大学机械工程学院,南京 210094)
卫星姿态确定系统中有多种不同类别的姿态敏感器,如三轴磁强计、太阳敏感器、星敏感器、红外地球敏感器和陀螺等。由于磁强计定姿精度有限,加上不适宜较高轨道卫星,应用范围受到限制。而星敏感器、红外地球敏感器结构复杂、成本高。太阳敏感器是航天任务中的一种常用光电姿态传感器,可提供太阳矢量与航天器上特定轴线间的角度反馈[1]。它还能用于太阳望远镜一类的有效载荷、太阳帆板的精确定向控制。在星敏感器与红外地平仪太阳入射光线的保护控制、产生开关和时标信号中也能起到作用。它还能确定空间飞行器在自(旋过程中的相位基准,测定飞行器的自旋转速和角度等姿态数据[2]。太阳敏感器主要分为模拟式太阳敏感器和数字式太阳敏感器[3]。模拟太阳敏感器大多利用光电池作为光电探测器,当太阳光照射到光电池时,光电池的输出电流大小与太阳光入射强度的垂直分量满足特定关系。数字式太阳敏感器,其采用小孔成像的原理构造光学系统,以图像传感器作为焦平面探测器。挪威奥斯陆大学采用图像传感器集成片上系统,结合利用了模拟太敏和数字太敏的优点[4]。
立方体卫星,是用来进行简单的太空观察和对地球大气进行测量的标准立方体模块或其组合体的小卫星。立方体卫星一般指尺寸为10 cm×10 cm×10 cm,质量不大于1 kg的皮卫星,称为标准单元(1U)。由于其对体积、质量和功耗都有苛刻的要求,常规卫星上常用的高精度数字太阳敏感器由于体积较大、功耗较高而无法应用。而传统的模拟式太阳敏感器,测量精度和分辨率较低,所以体积小、质量小、精度较高、成本低的模拟式太阳敏感器立方体卫星上具有较大需求。
由于模拟式太阳敏感器构造相对简单,成本及功耗较低,国内外相应单位都对此类敏感器展开了研制。北京控制工程研究所设计的一种梯形狭缝式太阳敏感器具有大的检测视场,视场范围为18°~173.5°[5]。但其探头质量达0.405 kg,探头体积为91 mm×80 mm×81 mm,体积和质量都过大。浙江大学研制的双轴模拟太阳敏感器精度在±45°视场范围内具有±1°的测量精度[6],但视场角偏小。中国科学院上海技术物理研究所设计了一种专门用对日观测成像稳像系统的超高精度太阳敏感器,在1°的小视场下使用,具有10‴的精度[7]。但是其专门用于对日观测成像,在立方体卫星上应用时视场不符合。荷兰的TNO-TPD公司设计研制的四象限太阳敏感器在±64°视场范围内具有±0.3°的测量精度[8],缺点是功耗过大,达到200 mW。美国加州理工学院喷气推进实验室设计的三轴太阳敏感器除了能测量太阳的入射角和方位角,还能测量太阳自旋轴的转动角度,其视场角为25°,具有0.1°的测量精度[9],但是对于立方星平台的微型化、大视角需求不能满足。
因而根据实际应用需求,本文设计了一种体积质量小、成本低、安装简便、精度满足需求的模拟式太阳敏感器。
1 基本原理
1.1 基本构成
太阳敏感器的构成主要包括3个方面:光学头部、传感器部分、信号处理部分。
光学头部可以采用狭缝[10]、小孔、透镜、棱镜等方式,光学头部完成太阳光斑成像。
传感器部分可以采用光电池、码盘、光栅、光电二极管、线阵CCD(电荷耦合元件)、面阵CCD、APS(有源像素传感器)、SMART等各种器件。光电二极管传感器控制简单,缺点是精度低、易受干扰;PSD(光电探测器件)和四象限传感器稳定性好、精度高、调节可靠;CCD 图像传感器灵敏度高,缺点是数据处理量大、编程繁琐[11]。传感器完成光学信号向电信号的转换以及模拟信号向数字信号的转换。
信号处理部分方案可采用分离电子元器件、单片机、可编程逻辑器件等;信号处理单元完成目标光斑的确定、光斑质心的求解和太阳入射角的计算。
本文设计的太阳敏感器为模拟式,光学头部采用小孔,传感器部分采用光电池片,信号处理部分采用微控制器。
1.2 工作原理
模拟式太阳敏感器基本原理是利用电池片光生电流余弦特性:
I(θ)=I0Scosθ
(1)
式中:I为产生的电流,I0为光电池片在光线垂直入射时的响应率,即电池片单位面积产生的电流,θ为光线入射角度,S为光照面积。光电池片光生电流不同,通过采集输出电流,转换为数字量进行处理计算(通过电流计算出太阳的入射角θ和方位角β,得出卫星本体坐标系与惯性坐标的角度偏差,从而获得卫星姿态信息)。
本文采用四象限光电池片[12],实物图如图1所示。
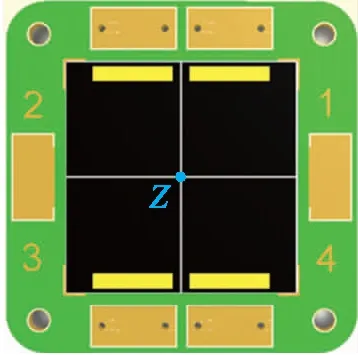
图1 光电池片
光电池片的工作部分尺寸为4L×4L(L为电池片的一个象限边长的一半),可分成4个象限,逆时针依次编号为1、2、3、4象限,形成二维XOY坐标系,产生光斑如图2所示。
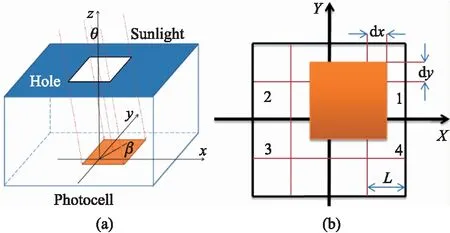
图2 光斑位置
根据I(θ)=I0Scosθ得:
I1=I0cosθ(L+dx)(L+dy)
(2)
I2=I0cosθ(L-dx)(L+dy)
(3)
I3=I0cosθ(L-dx)(L-dy)
(4)
I4=I0cosθ(L+dx)(L-dy)
(5)
联立解得:
dx=L[(I1+I4)-(I2+I3)]/I
(6)
dy=L[(I1+I2)-(I3+I4)]/I
(7)
式中:I1、I2、I3、I4分别为第一、二、三、四象限产生的电流,θ为光线与电池片平面法线的夹角,I为4个象限电流之和,dx、dy为光斑中心坐标。
落在电池片上的太阳光斑中心的偏移量(dx,dy)与太阳入射角θ和方位角β的公式如下:
(8)
β=arctan(dy/dx)
(9)
式中:H为小孔到电池片的距离。
2 光学头部设计分析
光学头部设计采用小孔,开在遮光罩上,采用铝合金材料进行机械加工,并且要进行发黑处理,用以吸收表面反射光的干扰。
光学小孔的基本功能在于控制入射光斑的形状、大小和敏感器的视场角。
小孔主要有圆形[13]和方形两种开孔形状,两种形状作比较发现:圆形开孔的主要优点是机械加工难度小并且能够获得较高的精度,缺点在于光线以大入射角投射到光电池片上时,其光斑不是标准圆,近似为椭圆,加大了信号的处理和分析难度。相比之下,虽然方形开孔的机械加工难度较大,加工精度相对低一点,并且孔径变小,加工难度增大、加工成本提高,但是方形孔的投影的光斑形状是方形,便于信号处理[14]。另外由于方孔在加工精度上的误差属于固定误差,可以进行分析补偿。综合上述原因,本文设计的遮光罩采用方形开孔设计。
小孔的主要设计参数有:孔径边长。孔径边长取电池片的一个象限边长2L,此时敏感器的视场角(FOV)为:
tan(FOV/2)=L/H
(10)
式中:H为小孔到电池片的距离。H越小,视场角范围越大,但H越小,意味着入射角度变化引起的受光照面积S的变化也将越小,即电池片输出的电流变化也将越小,导致灵敏度下降。按照112°的设计指标,L=2.375 mm,高度H约为1.6 mm。太敏实物图如图3所示。
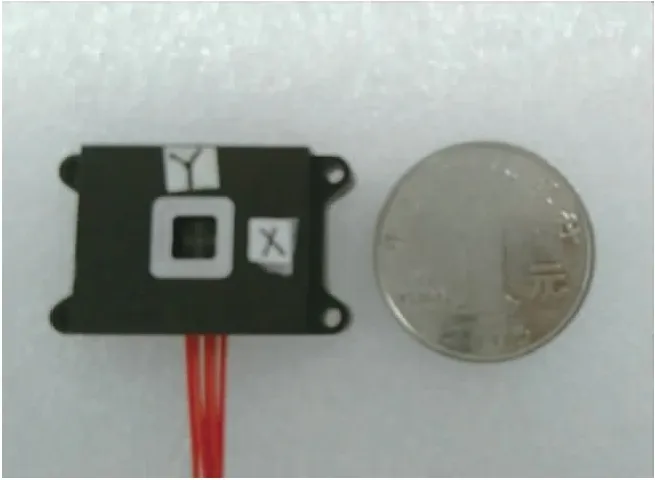
图3 太敏实物图
3 采样电路参数确定及仿真
本文采用的电路基于流压转换原理[15],将光电池片产生的电流转换成电压并采集,通过IIC接口传给MCU。流程图如图4所示。
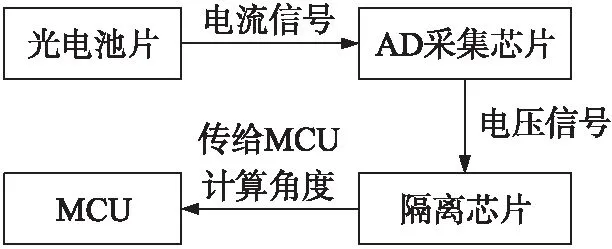
图4 采集流程图
选用的AD采集芯片工作温度范围广,能够在-40 ℃到125 ℃范围内工作,适应航天要求,最大能采集的电压范围是-163.84 mV到163.8 mV。通过在电流输出端与地信号之间并联一个采样电阻,从而得到电压值。其每个通道都有一个16 bit的分流电压寄存器,其中12 bit是用来存储分流电压数据。满量程范围为163.8 mV,所以此电路有效分辨率为0.040 0 mV,即LSB=40 μV。隔离芯片为兼容I2C接口的低功耗双向隔离器,具有两条隔离式双向通道,分别应用于时钟和数据线,可阻断高电压、隔离接地并防止噪声电流进入本地接地端,以至于干扰或损坏敏感电路,起到隔离保护的作用。IIC总线用于连接微控制器及其外围设备。它是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。在CPU与被控IC之间、IC与IC之间进行双向传送,高速IIC总线一般可达400 kbyte/s以上。由于IIC总线传输速度快并且占用MCU的IO口少,因而采用此接口设计。MCU根据程序控制从AD采集芯片的寄存器里读取数值,转换成电流,然后计算出太阳光线的入射角与方位角。
在垂直阳光照射下电池片单位面积产生的电流I0=0.3 mA/mm2,对电池片的第一象限输出电流进行仿真,设定入射角范围为θ=[0°,56°],方位角变化范围为β=[0°,90°],电池片第一象限输出电流为:
I=I0cosθ(L+Htanθsinβ)(L+Htanθcosβ)
(11)
得到第一象限输出电流仿真示意图,如图5所示。

图5 单一象限输出电流仿真示意图
由仿真结果得,电池片单一象限的最大输出电流IMAX发生在入射角和方位角为:θ=56°,β=45°。此时
IMAX=2.7548 mA
芯片满量程范围是163.8 mV,所以采样电阻R<163.8/2.754 8=59.459 9。取采样电阻R=56 Ω。在不考虑结构误差的情况下,模拟太阳矢量与计算出的太阳矢量夹角如图6所示,最大为0.020 6°,在可允许范围之内。
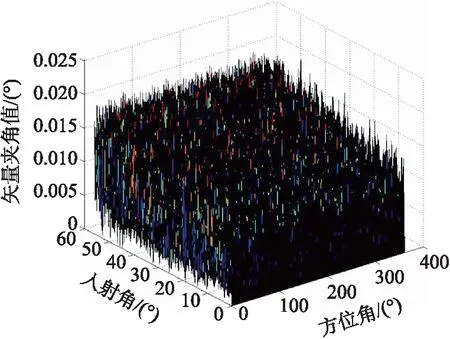
图6 太阳矢量的真实值与计算值夹角
4 实验分析
4.1 电路精度测试
电路板精度测试是为了测量所设计的电路板实际精度。采用NI PXI-1044高精度恒流源模拟太阳能电池片输出电流进行测试。实验中,控制电流源输出电流从0开始,步长值为2 μA,终止值为2.6 mA。根据实验数据绘制如图7,可以看出,电压与电流存在良好的线性关系。
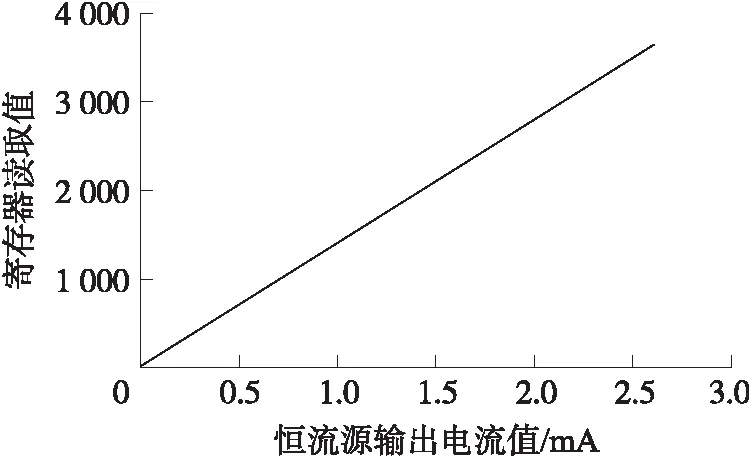
图7 寄存器电压值与电流值示意图
4.2 外场测试
通过在晴朗的天气进行室外测试[16],观察传感器读数的准确度,同时也为后续的精确标定实验提供参考依据。外场要选在开阔的地带,采用的仪器有运动控制器,电动旋转台,水平仪,太阳敏感器及其控制电路板,个人计算机。实验采取静态测试和动态测试。
静态测试是将太阳敏感器放在太阳下面,保持太阳敏感器静止。控制板每秒读取1次数据,连续读数29 min获得1 740个数据并保存,同时记录读数开始时间与结束时间。此时间段真实的角度信息可由STK(卫星工具包软件)仿真[17]得出,利用STK计算出在该时间段太阳矢量在空间中的高度角与方位角信息。将太阳敏感器读取的角度信息与STK计算出的角度信息进行对比,结果如图8所示。

图8 敏感器读取值与STK值对比图
由图8观察可知,敏感器读取的入射角的值与STK值存在一个固定差d_theta,这个差值主要是由于敏感器自身的机械结构误差、太阳光经过大气层会有散射及折射造成的。d_theta的最小值为5.597 2°,最大值为6.231 6°,极差为0.634 4°。对d_theta求得标准差为0.014 5°,说明与STK的差值保持稳定。该差值在后续的精确标定实验中能够予以补偿。敏感器读取的方位角的值与STK值也存在一个固定差 d_beta,主要是与敏感器的初始摆放位置有关,敏感器定义的零度方位角与STK的零度方位角没有重合,如果该差值为定值,则说明对于敏感器测量精度没有影响。进一步对该差值求取标准差为0.032 0,说明该差值稳定度良好,方位角测量准确。
动态测试是将太阳敏感器固定在电动旋转台上,调节水平仪使得太阳敏感器感光面保持水平。通过运动控制器使旋转台每次旋转20°(转台定位精度为0.001°),直到转动一圈,以此达到方位角从0°~360°的改变。传感器读取多组入射角、方位角数据并保存。代入初步误差计算模型后,入射角、方位角与每次位置的关系如图9所示。
由于旋转台每次转动和读数的时间是1 s,旋转一圈总时间为18 s,因此在这个时间段内可忽略太阳运动导致角度的变化。由图观察可知,入射角最大值为39.814 8°,最小值为39.033 8°,求得极差为0.781°,入射角标准差为0.238 7°。因而可得入射角的3σ测量精度为0.72°,说明入射角的测量稳定度良好。图中显示方位角呈现良好的线性关系,由于方位角的理论转动角度值为20°,通过控制板采集计算的转动值最小为19.505 5°,最大为20.578 6°,与理论值接近。进一步对方位角前后两次读数求差值,对所有差值求得标准差为0.23°,说明旋转台每次旋转20°时,读数也基本保持20°的变化,说明方位角的测量精确度良好。
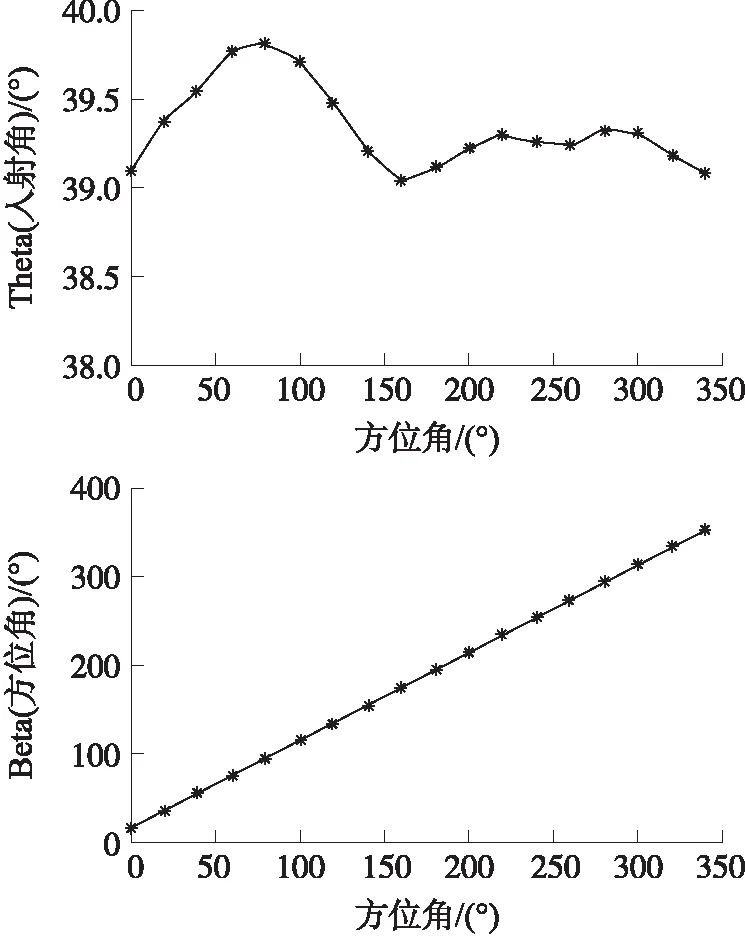
图9 敏感器读取入射角、方位角值
5 结论
本文首先分析了模拟式太阳敏感器的余弦检测原理,然后进行了光学头部的设计,经过仿真分析与实验测试,验证了设计的正确性与合理性。本文设计的模拟式太阳敏感器,具有体积小(32 mm×19.7 mm×8.1 mm)、质量小(9 g)的特点,适合于立方体卫星的应用需求。
在外场测试条件下,精度结果优于1°。在后续精确标定实验条件下,通过进一步补偿误差,还能够更进一步提高本传感器的性能。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
大学物理实验(2022年6期)2022-03-03
科学技术创新(2021年25期)2021-09-11
科学大众(2020年5期)2020-07-18
中学数学研究(广东)(2019年12期)2019-07-18
物理实验(2019年1期)2019-02-13
中国医疗设备(2019年1期)2019-01-15
弹箭与制导学报(2018年3期)2018-08-28
小学阅读指南·高年级版(2016年1期)2016-09-10
航天返回与遥感(2011年6期)2011-10-11