基于光镊技术的研究性实验
2018-11-22 10:51:40李银妹孙腊珍
物理实验 2018年11期
李银妹,姚 焜,孙腊珍
(中国科学技术大学 a.光学与光学工程系;b.物理实验教学中心,安徽 合肥 230026)
1 科学背景和实验目的
2018年诺贝尔物理学奖授予美国科学家阿瑟·阿什金(Arthur Ashkin), 以表彰他在“光学镊子的发明及其在生物领域的应用”突破性贡献. 1986年阿什金成功地利用一束强会聚激光束实现了可以移动生物微粒的三维光场,这一发明被形象地称为光学镊子(Optical tweezers)或光镊[1-3]. 光学镊子搬运微粒的情形酷似无形的机械手将按照操作者的意志自如地控制目标微粒,如原子、分子、细菌或细胞等. 光学镊子为研究微观物质结构和功能,以及观察和控制生命的机器创造了全新的契机.
1989年在中国科学技术大学的科学基金资助下,郭光灿教授组织成立了国内第一个光镊技术研究组. 李银妹教授研究组长期以来致力于光镊技术以及应用的研究. 2013年他们首次将光镊技术用于动物活体内细胞,开拓了光镊研究活体动物的新领域,使得该技术向医学临床迈出了关键一步. 同时在进行另一个研究方向,即利用光镊操控被捏合在单分子上的微米小球来控制单个分子,用光镊提供的皮牛顿力研究生物马达相互作用以及RNA分子结构和功能等.
在系统研究光镊技术的基础上,2000年中国科学技术大学将这项前沿物理的科研成果及时引入本科生实验教学,开设“光的力学效应及光阱力的测量”实验,取得了很好的教学效果[4]. 本文从光学镊子的基本原理出发,介绍实验设计思路,展示光的力学效应系列实验,开拓光学镊子研究性实验教学[4-6],以此为高等院校的基础和前沿物理的研究性实验教学提供参考.
2 光镊的基本原理
2.1 光力的产生原理和特点
光是一种电磁波,它具有能量,这在麦克斯韦预言电磁波以前就被实验事实所证实. 但是,光具有动量,对照射物具有压力,直到1901年才被物理学家列别捷夫(ПётрНиколаевичЛебедев)首先从实验上予以证实.
首先了解入射光对物体表面的光压(光力)[3]. 设一束光入射到某一小面积元上,如图1所示,入射光束的光强为I0(即单位时间垂直于光的方向的单位面积上光的辐射通量),单位时间通过小面积的光通量为
dE=I0dScosi.
(1)

图1 光在元面积上的受力分析
当光束A以i角入射到dS面元上,小面元受到光束A光压力的方向为与面元的法线方向n平行(或相反). 设光强为I0中的光子数为N,即
(2)
(3)
(4)
如果有较大的表面处于光场中,整个表面所受力的力可以根据(4)式积分得到
(5)
根据(5)式的计算,就可以分析和计算光镊对微粒的作用力. 由于光镊研究的微粒大小在几μm到几十μm范围内,游离在液体中的生物细胞大多数是几μm的透明小球,所以以透明电介质小球为模型,通过考察光穿过介质球的行为来分析光作用于微粒的力.
设小球折射率为n,且大于周围媒质的折射率n0. 当一束激光穿过小球时,由几何光学可确定光线传播的路径. 为了便于说明,建立三维直角坐标系. 如图2所示,以小球的中心为原点(0,0,0),以光线传播方向为z轴正向,在光束中取2条典型的光线,用黑粗线表示. 光线在进入和离开球表面时产生折射,同时在表面也产生部分的反射,用虚线表示. 对于透明介质小球,入射到小球后被小球反射光线产生的力远远小于透射光线产生的力,因此可以忽略不计,只分析与光的折射相联系的施加在小球上的力.
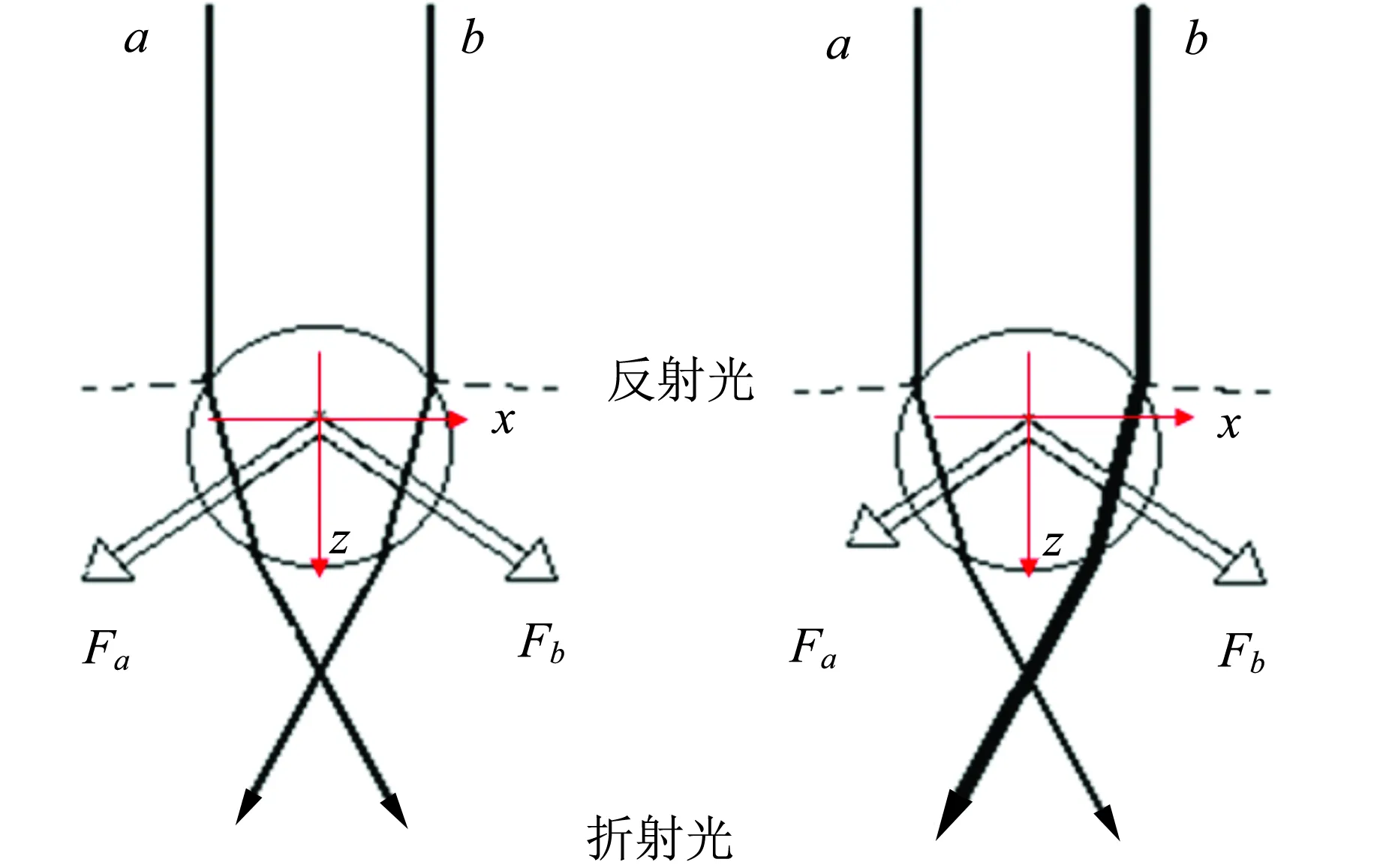
(a)均匀光场 (b)非均匀光场图2 均匀光场与非均匀光场中的透明小球受力分析
若折射前所有的光均沿z方向传播,即光的动量是沿z方向的,然而离开球后光传播方向有了改变,即光的动量有了改变. 图2(a)为均匀光场各子光束“给予”小球的力在横向(x-y方向)完全抵消,但存在沿z方向的推力,这个力称作散射力. 微粒在散射力的作用下沿着光的传播方向运动. 当小球处在非均匀光场中,如图2(b)的自左向右增强的光场中,在横向存在强度梯度. 小球在梯度光场作用下,所受到的合力在横向不再完全抵消,总的合力是把小球推向光场强的方向(右边略偏下处). 小球在非均匀的即强度分布存在梯度的光场中所得到的是指向光强较强处的力. 这种由于光场强度分布不均匀产生的力称之为梯度力.
光镊技术是将激光用高倍物镜会聚,形成梯度光场. 在强会聚的光场中,微粒在xyz3个方向都将受到指向光最强点(焦点附近)的梯度力.z方向受的力的方向与光传播方向相反,也就是说光对微粒不仅有推力还有拉力,微粒被约束在光最亮点附近.
图3为具有一定强度梯度的高斯光束,通过大会聚角的透镜高度会聚,形成强度梯度光场作用于小球. 1对典型的光线a和b经小球折射后产生力Fa和Fb,它们的矢量和指向焦点F. 当小球的球心O和焦点F间有偏离时,合力总是使小球趋向焦点.
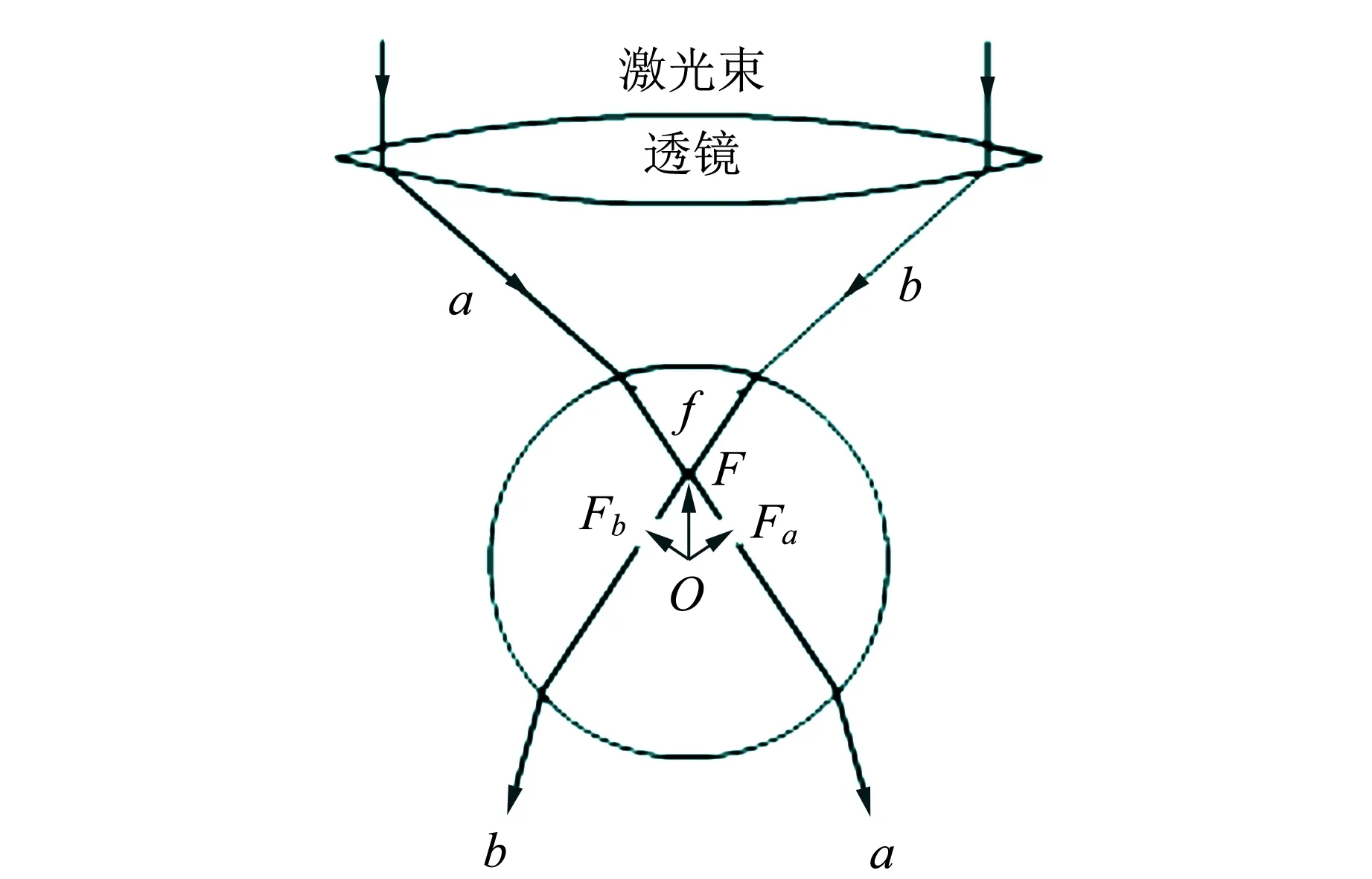
图3 单光束梯度力光阱原理图
光镊的特点:
1)光镊是以光场的形式与物体交换动量的结果,光镊是“无形”镊子;操作是非接触的、无损的,没有机械镊子夹持物体有集中的受力点.
2)光的可穿透物体特性,穿过封闭系统的表层(细胞膜)操控其内部微粒(细胞器),也可以透过透明的一封闭的样品池外壁操控池内微粒,光镊实现真正的无菌操作.
3)光镊对物体的操控类似弹簧,在操作过程中能实时感应微小的负荷. 因此,光镊是极其灵敏的力传感器,力的分辨精度高达几fN.
2.2 光镊装置
建立光镊装置的目的是实现一个强度高梯度变化的光场,能够对微粒进行捕获,然后通过光与微粒所在的环境之间的相对运动,达到操控微粒目的. 观测光镊所控制的微粒是通过显微成像系统获得,用CCD采集显微图像信息并通过专业软件处理获得微粒移动速度,计算位移和力等信息. 如图4所示为光镊的光路和实验仪器. 实验光捕获的光路由激光器、光学耦合器件、聚焦镜、照明光源和聚光镜、样品和样品室、样品台和操控器、成像与观测光学系统部分组成. 光镊光源要满足获得高梯度光场的基本条件,因此用激光器作光镊光源,对光源模式、光束的指向性、激光波长的选择、激光功率的选择等都有一定的要求.
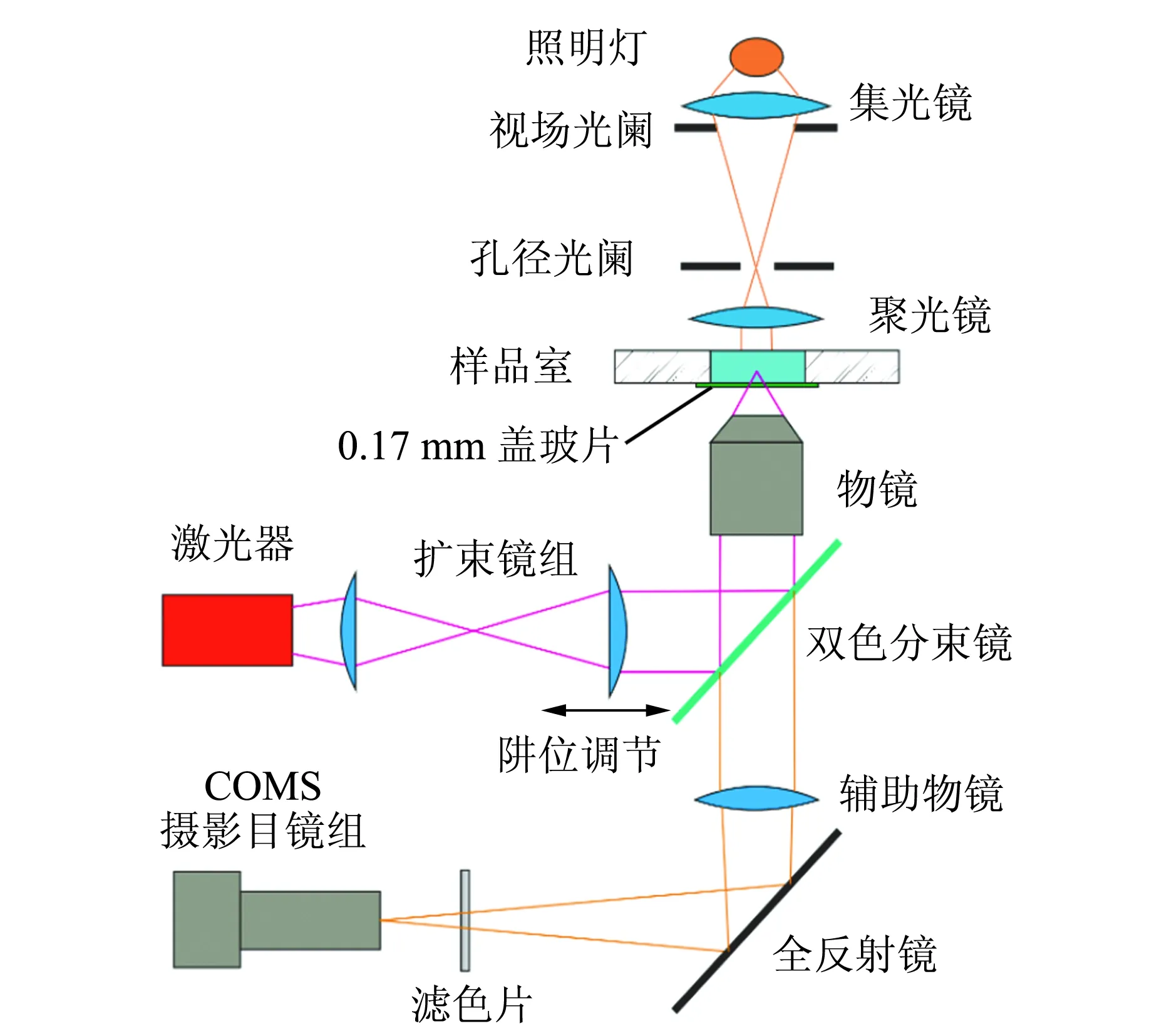
(a)光镊光路图
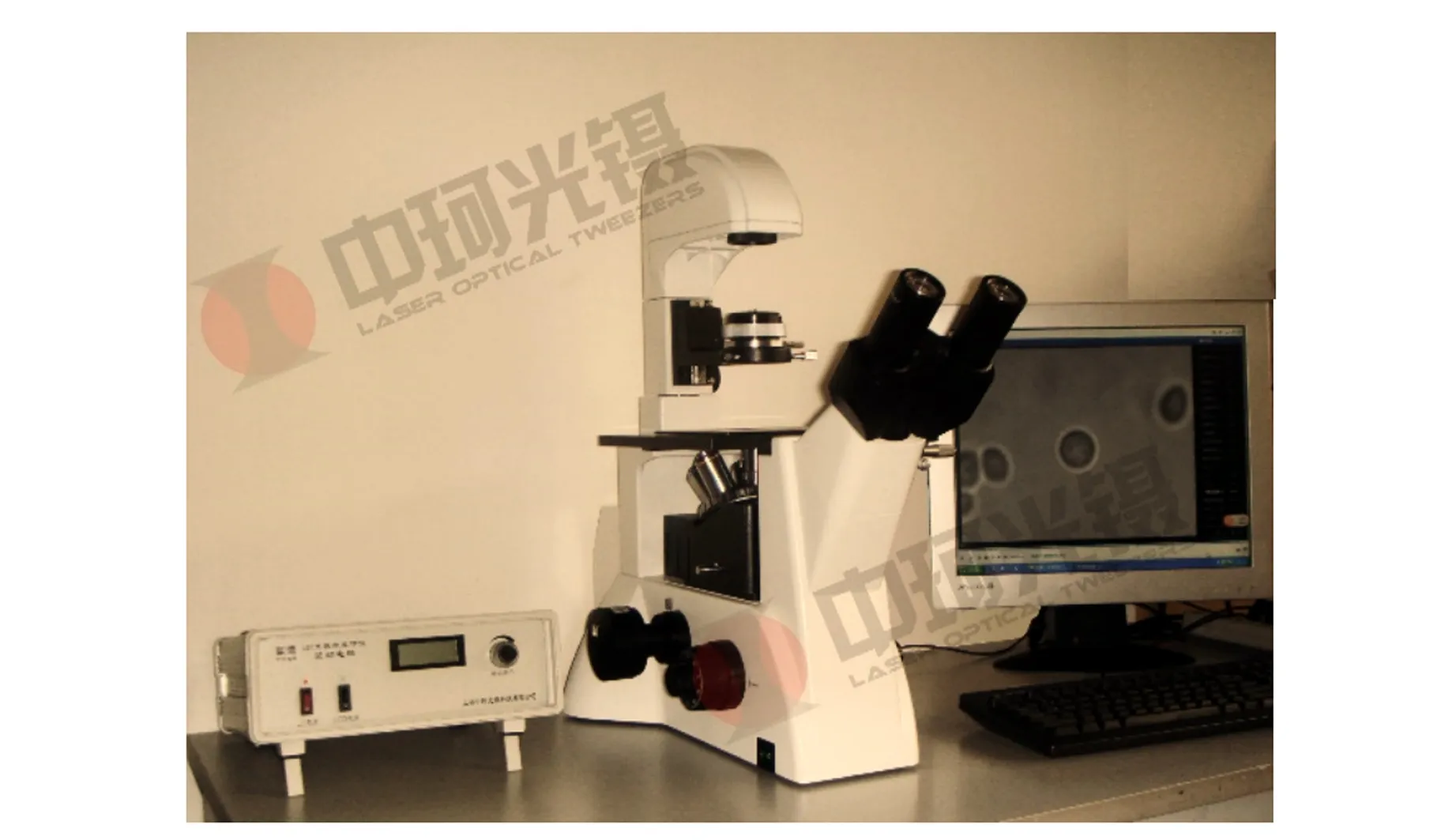
(b)实验仪器图图4 光镊光路图和实验仪器图
从图4看到,光镊是由2部分光路组成的:一路为激光器出射的激光经扩束镜组扩束,再通过双色分束镜射入显微物镜,聚焦成具有强梯度光场的光束,操控样品室中的样品;另一路是传统的显微镜成像光路,照明光通过照明系统照明样品室,经显微物镜和目镜成像到CCD相机上,在计算机显示器上显示出被光镊样品的像. 光镊装置的主要部分为:物镜聚焦光束和观测物体的成像系统,与传统显微镜的基本结构相同,因此光镊发明初期均借助于常规显微镜搭建而成,并且一直沿用至今,成为光镊仪器设计的主流.
3 实验内容和方法概述
实验的主要目的是观察被强聚焦的激光束捕获的微粒以及光如何操控的情形,然后利用CCD相机采集视频和图像,通过计算机图像处理技术得到光阱性能,进一步得到研究对象的信息.
3.1 光阱力
在光阱中,微粒在强会聚光场的作用下会受到三维梯度力和散射力,当梯度力大于散射力时,合力将微粒束缚在光阱中,称之为光阱力[3]. 光阱力是三维力,一般分为横向阱力和轴向阱力来研究. 如果先把微粒放在光阱中心,用外力沿x方向牵引微粒,不断增大外力,微粒不断偏离光阱中心,此时如果停止牵引,微粒会被光阱力拉回光阱中心,这时微粒受到的光阱力与到光阱的中心距离成正比,但如果继续增大牵引力,在偏离光阱中心某位置x0时微粒离开光阱,此时的牵引力等于光阱力的最大值,对应的光阱力称为最大光阱力,相当于弹簧在最大弹性伸长时物体所受到的力. 当微粒所承受的外力超过最大光阱力时,即继续牵引微粒超过x0范围后,虽然光阱对微粒仍有作用力,但光阱力不断减小,而如果外力(牵引力)大于使微粒返回光阱中心的光阱力,微粒将脱离光阱的束缚,所以最大光阱力也称作光阱的逃逸力. 光阱力与微粒位置的关系近似用图5中x0到xmax和-x0到-xmax这2段的虚线表示.
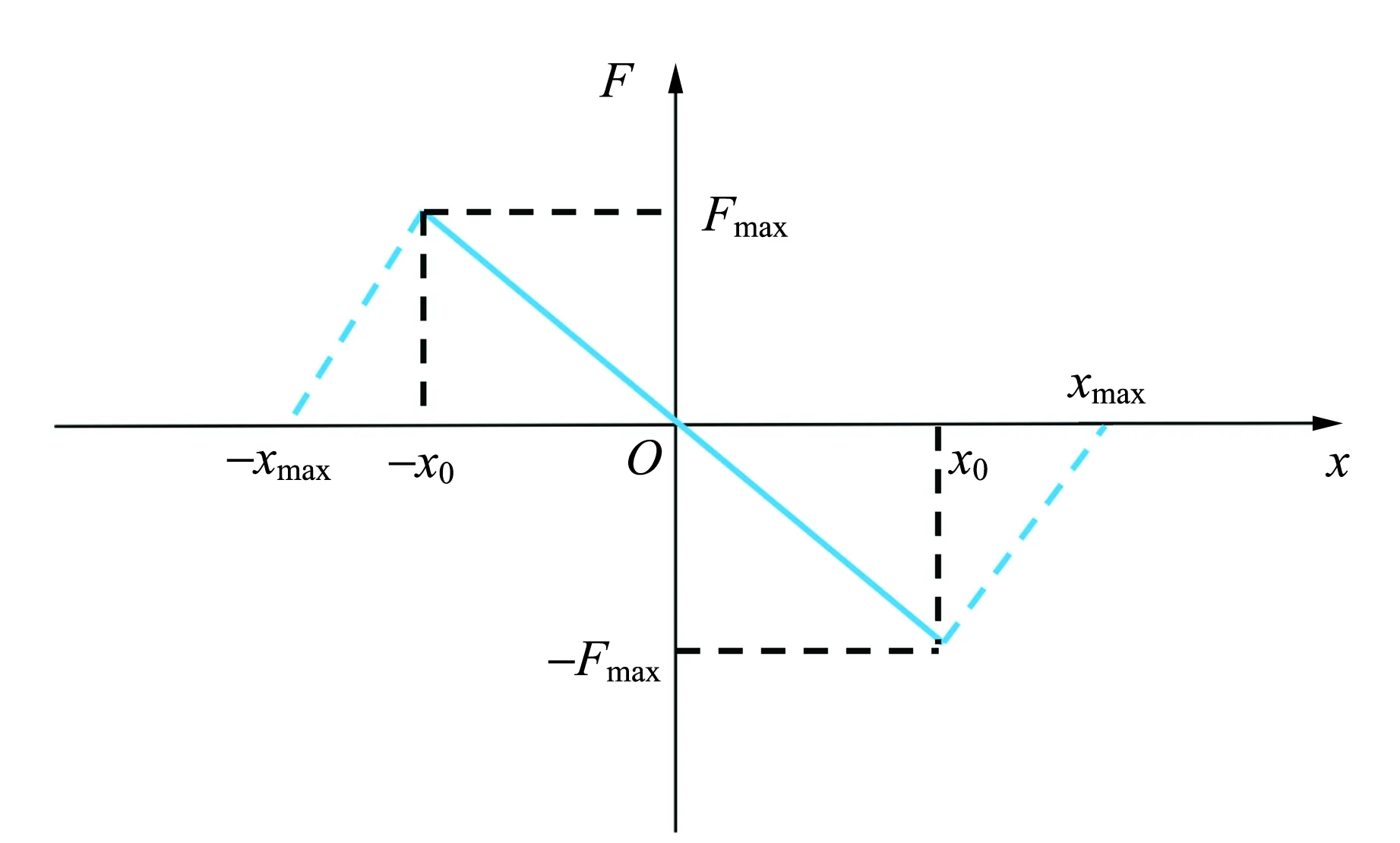
图5 微粒偏离光阱中心的位置x与光阱力的关系
设O为光阱中心,x轴为微粒偏离光阱中心的位置,F为光阱力. 在O到x0的区间微粒受到的光阱力与x成正比,所以也称作光阱力的线性区(简谐区),而x0到xmax的区间叫做非线性区(非简谐区),图中用虚直线近似.
在光阱力F达到最大值的范围内,光阱力随距离增大而增大,是线性关系,即
Fi=kixi,
(6)
式中i=(x,y,z),可见在光阱的简谐区,光阱力是三维弹性力,光阱对微粒作用像三维弹簧.
实验中测量光阱力的简单的方法是采用被动操控的流体力学法. 将盛有样品的样品室置于平台上(如显微镜样品台),使平台速度保持恒定为v,也即光镊捕获的微球以v的速度相对周围液体运动. 若此时微球在光镊中未被流体冲走,则继续提高平台的运动速度,直到小球从光阱中逃逸,此时的速度即为该光阱输出功率下的逃逸速度v0. 小球在逃逸速度下相应的流体黏滞阻力称为临界黏滞力F0,在此逃逸速度下,光镊的最大捕获力Fmax与临界黏滞力Fc大小相等,方向相反. 根据流体力学中(在没有涡流情况下)的Stokes公式:
Fc=6πηav,
(7)
计算出临界黏滞力的大小,从而得到最大光阱力的大小. (7)式中η为黏度,a为微粒半径,v为微粒相对于周围液体的速度.
3.2 光阱的阱域
光阱的阱域定义为在静止(没有外力)的情况下,观察到微粒在距离光束中心的某范围内自行陷入阱中,这个范围就是光阱的阱域.
如图6所示,在光束垂直的平面(即x-y平面)观察,物体一旦进入以光束中心为圆心、半径小于xmax的范围内,就有趋向中心运动的趋势. 已经进入这个范围的微粒,在没有任何外力的情况下,且其动能为0,它会被光阱吸引向光阱中心运动. 实际上微粒始终在周围液体分子作用下做布朗运动,所以微粒自身具有一定动能,由于微粒做布朗运动的动能小于光阱的势能,所以微粒会趋向光阱中心运动,最后陷入光阱.

(a)光阱边缘的微粒有向光阱运动的趋势

(b)微粒在光阱力的作用下加速向光阱中心运动

(c)微粒已陷入光阱中心图6 光阱阱域
阱域大小的测量如图6所示,布朗微粒在光阱力的作用下自行陷入光阱的过程. 打开光镊,标记已知光阱的中心位置为O,观测到微粒做自由布朗运动,记录此刻微粒受阱力的吸引开始趋向光阱中做定向运动的位置,即此位置为光阱域外沿. 由于光镊研究的微粒大多有布朗运动,温度越高其布朗运动越激烈,所以阱域的大小与微粒的大小、动能和温度等因素有关.x-y平面光阱的阱域一般为圆形区域,其形状取决于光束的光强分布.
3.3 光阱的阱位
光镊捕获微粒进行操纵时,将微粒稳定捕获的位置称为阱位. 阱位是垂直光轴的平面,也是显微系统的成像平面,定义稳定捕获的微粒平面到激光的焦点的轴向距离为阱位高度. 实验中常常测量样品池地面到捕获平面的高度为的阱位值. 阱位高度与光束会聚度、微粒的大小、相对折射率和液体的性质等有关. 光镊捕获微粒后,阱中的微粒通过成像系统进行观测,当微粒在成像平面清晰成像时,此刻阱位平面与成像面重合,如图7所示,这是光镊捕获微粒的理想状态.
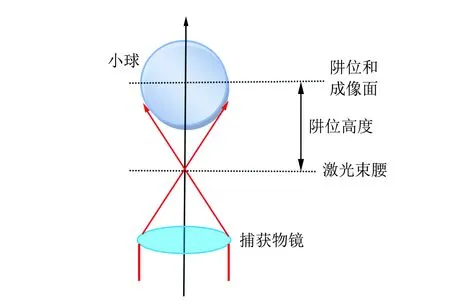
图7 阱位示意图
如果光镊能够操控微粒运动,但被捕获的微粒成像模糊,认为是阱位偏离了成像平面,此时需要调节阱位调节镜,使之与成像面取得一致.
3.4 光阱的刚度
光阱力随微粒在光镊中所处的位置而变,当微粒偏离光镊的中心,就会受到指向该中心的光阱力,也就是说,光镊像是三维的弹簧. 如图8所示,在x方向,微粒受到的光阱力F与它偏离光阱中心的位移成线性关系,即
F=-kxx,
(8)
式中比例系数kx为光阱在x方向的光阱刚度,y和z方向分别为y方向的光阱刚度和z方向的光阱刚度,把x和y方向的光阱刚度统称作光阱的横向刚度,z方向的光阱刚度称作轴向光阱刚度.
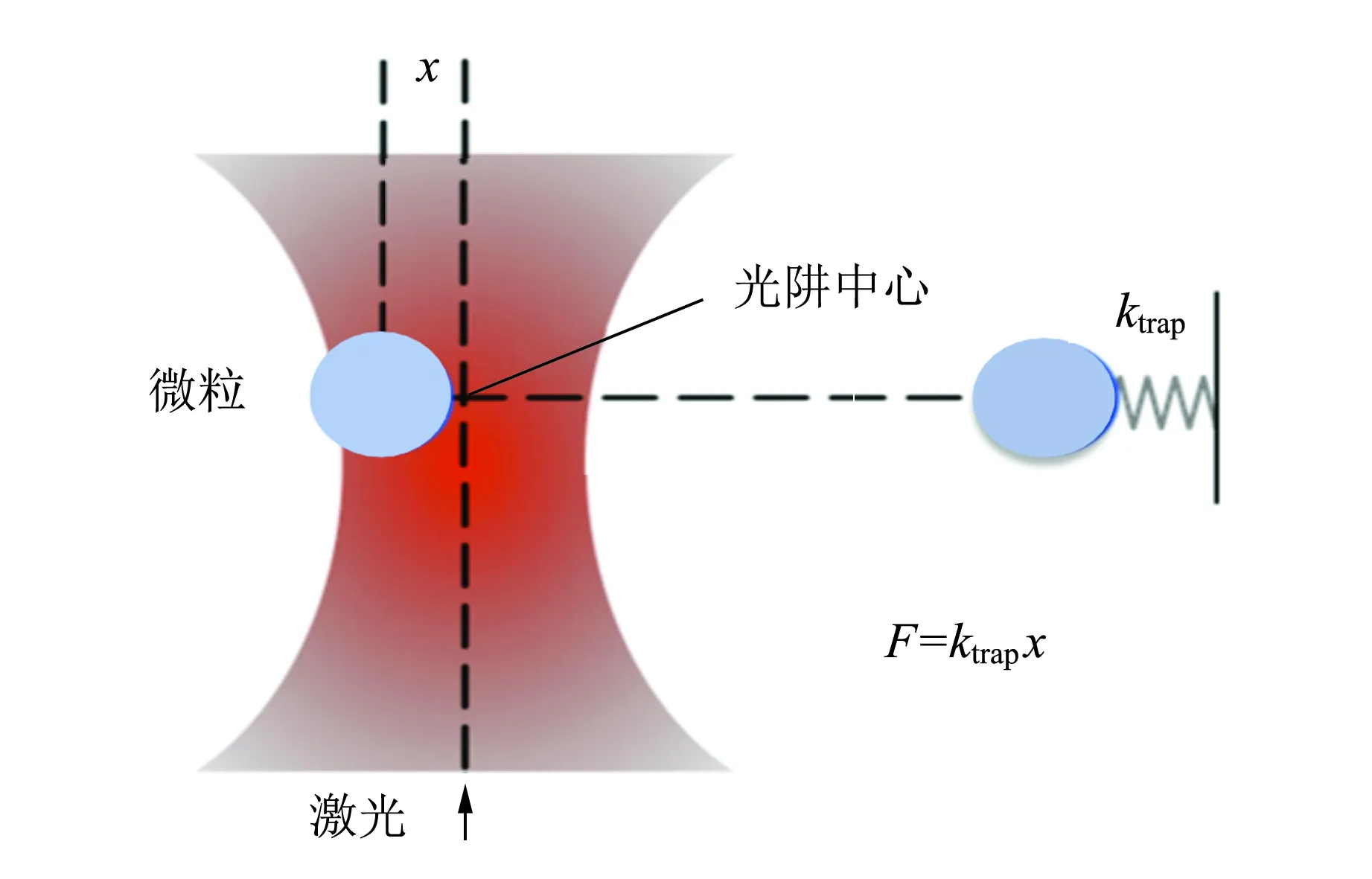
图8 光阱刚度的测量
3.5 流体力学法测量光阱力和最大光阱力
最基本的测量光阱力的方法是流体力学法,由于光镊的样品一般为悬浮的稀释微粒水溶液,在距离样品室底面适当距离处捕获住1个微粒,然后使溶液相对微粒以一定速度v流动(操控的方法见文献[4]).
一般情况下溶液和微粒相对运动的方向是沿着与捕获光束轴垂直的平面,如果微粒较大,不考虑微粒的布朗运动的情况下,微粒的半径r和黏度η已知,只要测定微粒与媒质的相对速度v,就可以测定在该速度下的光阱力. 在离光阱中心很近的范围内(简谐区),光阱力为
Fx=-kxx,
(9)
Fx叫做横向光阱力,光镊捕获的微粒是悬浮在溶液中.
图9为流体力学法测量微粒的逃逸速度,具体测量的方法是以恒定的加速度横向微动样品平台,直到微球从光阱中逃逸. 已知2幅图像的时间间隔,即可算出微粒的逃逸速度. 设平台的运动速度为vmax,由式(7)计算出的光阱力为最大横向光阱力.

(a)光镊捕获微球示意图

(b)CCD相机拍摄的动态图1

(c)CCD相机拍摄的动态图2图9 流体力学法测量微粒的逃逸速度
4 拓展实验
近30年来光镊技术的研究和应用得到了迅速的发展,特别是在生命科学领域,光镊已成为研究单个细胞和生物大分子行为不可或缺的工具[3]. 在完成光镊的基本实验基础上,有兴趣的学生可以根据自己的理解和对这项技术的掌握,深入进行该领域的学术调研,自己提出问题、设计新的实验.
4.1 微粒的空间排布
自然界存在大量分散体系,由于微粒不间断地进行随机布朗运动,都涉及微小宏观微粒与流体相互作用这样一个基本问题. 针对流体中的微粒直接的实验很难实现,但有了光镊就不再难了[7]. 学生可以利用光操控的功能进行微粒的排布,或将单个微粒从群体中分离出来等,仅用光操控这一功能可以开拓出许多的极具兴趣的实验(如图10所示).
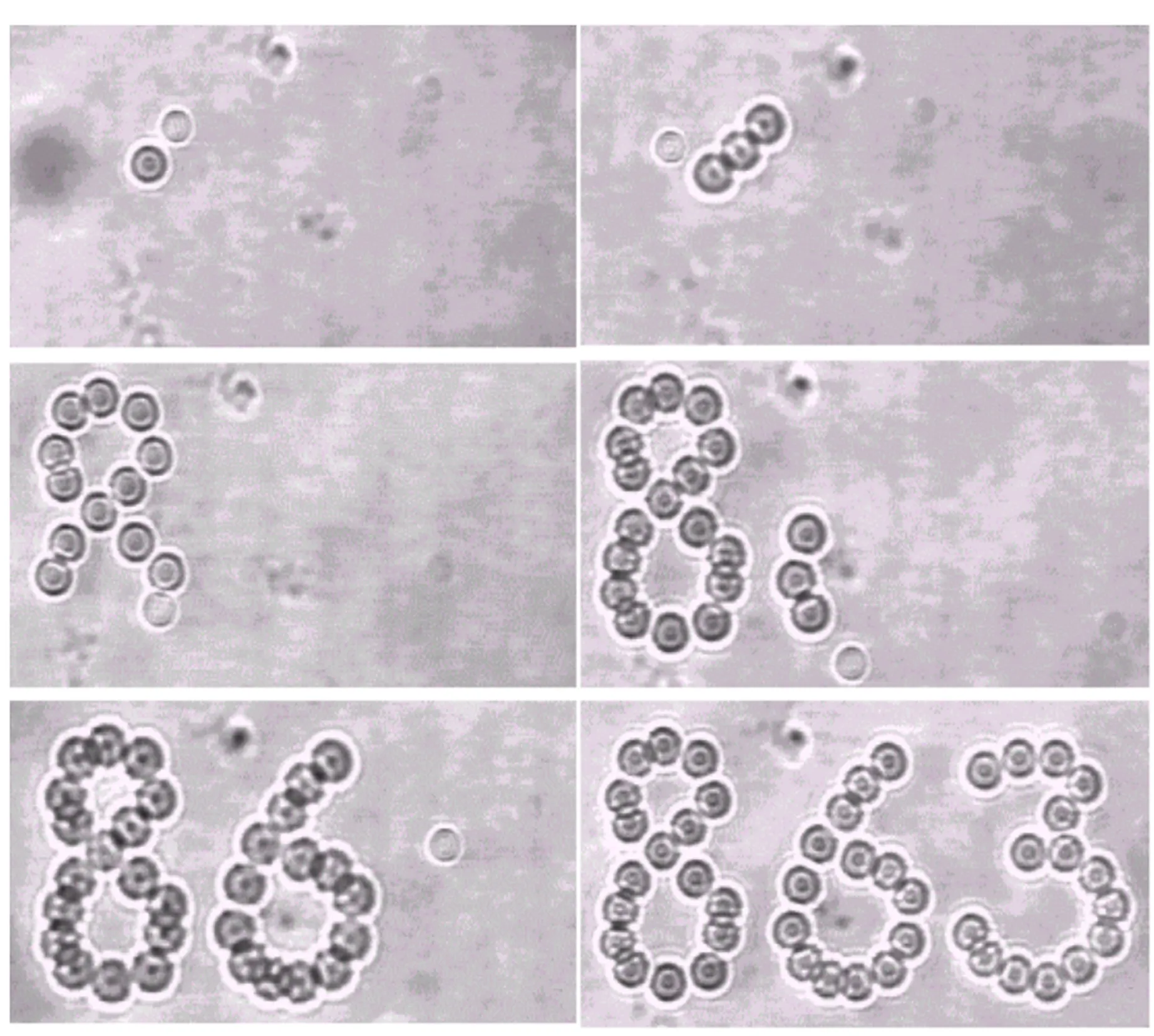
(a)平面构图“863”字

(b)立体构图“X-T”图10 用光镊操控2 μm小球逐个排布成微米结构
利用光镊可以控制微粒的优势实现各种微机械排布和组装. 在排布微粒的实验中需要考虑,如何将微粒牢固地黏连在样品室的底部,形成稳定的图案或结构.
4.2 飞行时间法测量光阱刚度
基于光镊技术的光力学效应实验得到的光阱力是半定量的,若要在较简单光镊仪器上提高测力的精度,可以采用文献[8]中提出的 “飞行时间法测量光阱刚度”,该方法是利用统计力学方法较精确计算光阱力,即利用相机记录微粒陷入光阱的动态过程,从一系列显微图像分析得到光阱刚度. 飞行时间法的优点是不考虑微粒的形状,不需要标准微粒做标定.
光镊操控液体中微粒,光阱中的微粒受到周围流体所施加的黏滞阻力以及周围液体分子的随机碰撞力的作用. 同时考虑光阱力、黏滞阻力以及布朗运动随机力,光阱中微粒的一维运动可以用朗之万方程描述
(10)
其中,m为微粒的质量,x(t)为微粒在此刻的瞬时位置,kB为玻尔兹曼常量,T为热力学温度,γ=6πηa,η为流体的黏度,a为微粒的半径.ξ(t)描述满足标准差为2的高斯分布的随机过程,即:
〈ξ(t)〉=0, 〈ξ(t)ξ(t′)〉=δ(t-t′).
在低雷诺数条件下,阱中的微粒可以近似看作过阻尼振子,惯性项远小于黏滞力项,可以忽略. 假设初始时刻,微粒距离光阱中心位移为A,在光阱力作用下,微粒将飞向光阱中心,考虑稳态过程,略去随机项,郎之万方程可进一步简化为
(11)
(11)式中的一阶常微分方程的解为
其中τ为微粒的飞行特征时间
(12)
实验上,用相机记录微粒运动的动态过程图像,通过数字图像处理得到微粒向光阱中心飞行过程中位置的变化信息. 采用指数曲线拟合微粒随时间飞行的动态位置得到飞行的特征时间,根据特征时间和黏度求出光阱刚度.
5 结束语
近30年来,中国科学技术大学对光镊技术及其应用进行了系统研究,并利用光镊技术的科研平台,将科研成果提炼成教学实验,及时地为本科生开设了前沿物理与新技术研究性实验教学[5-6],取得了良好的教学效果. 本实验使得学生有机会体验微观世界中光的力学行为,测量皮牛量级(10-12N)的光镊力;利用光镊技术操控细胞的运动,实验过程产生的物理现象既有预料之中的必然性,又有未知中的玄妙感,学生在其中探究其奥秘. 通过本实验学生对光的力学效应的产生、光镊操控微粒的基本原理、图像采集和处理等有了整体的理解,开拓了他们的视野.
猜你喜欢
激光技术(2024年1期)2024-04-03 12:09:02
中华环境(2021年9期)2021-10-14 07:51:06
中华环境(2021年8期)2021-10-13 07:28:34
中华环境(2021年7期)2021-08-14 01:57:26
奥秘(2021年3期)2021-04-12 15:10:26
科学(2020年5期)2020-01-05 07:03:12
常州工学院学报(2017年3期)2017-09-16 03:48:25
疯狂英语·新悦读(2017年6期)2017-06-24 13:52:05
光学精密工程(2016年6期)2016-11-07 09:08:16
红领巾·探索(2014年1期)2015-03-16 16:35:14