多功能柔韧性训练装置的设计与研发
2018-11-21 09:08戈俊
体育世界(学术版) 2018年10期
戈俊
1. 前言
在日常教学与训练中,柔韧性素质的发展是必不可少的,但是往往这又是教练员和运动员最难克服的难点。目前已有的用于进行腿部韧带拉伸使用的普通健身器械,功能单一,不能同时实现横向、纵向劈腿,且操作繁杂,不能够很方便的为使用者所用。即使专业的训练装置,往往结构、形状确定,难于调整,这就造成其有以下缺陷:①身体姿态无法正确摆放。正确的身体姿态是拓展柔韧的前提,需要教练员持续不断的纠正运动员在拓展柔韧期间的错误动作,如果该项目运动员的数量较多,那么这无形中就浪费了许多的训练时间。②无法适用于不同身体状态的运动员。不同的运动员,自身的柔韧基础素质有差异。在进行柔韧性拓展练习过程中,教练员会辅助运动员进行柔韧的拉伸,其辅助力度难以精确的把握,往往会造成不必要的运动损伤,导致运动员的运动寿命降低。本技术针对上述问题,提供了一种能够使得运动员无需辅助,自己就能完成柔韧性的练习,且能够完成并腿体前屈、分腿体前屈、纵劈腿、横劈腿等多种训练的柔韧性训练装置。
2. 研究方法
2.1 文献资料法
运用文献资料法,对目前已有的用于进行腿部韧带拉伸使用的健身器械进行分析,以“训练器械”、“柔韧性”为检索词在中国知网数据库搜索1999年1月1日-2017年1月1日的文献,累计获得文献53篇,选取与本选题密切相关文献16篇进行重点阅读,通过对相关研究文献的研读与梳理,为本研究的开展提供理论和方法支持。
2.2 画图设计法
针对现有的柔韧性训练器所存在的问题,解决柔韧性训练中身体姿态无法正确摆放和无法适用于不同身体状态的运动员等一系列的柔韧练习的难点,利用所学知识以及在专家的指导下设计了用于自动控制操作的柔韧性训练装置。本设计过程有以下几个方面的内容。
2.2.1 方案草图设计

图1 方案草图
如图1是该柔韧性训练装置所要达到的动作效果分析图。根据该图可以看出该柔韧性训练装置需要达到下肢固定、大腿升降和小腿抬升的目的。
2.2.2 建模方案设计
如图2所示,方案一为柔韧性训练装置的初步想法的犀牛模型,该方案可以使使用者通过物理的机械结构自主完整所要达到的动作目的。但后期发现该方案只能完成双腿横向劈叉的功能,并不能完成前后劈叉动作,因此,此方案被舍弃。

图2 初步想法图
如图3所示,方案二为将先进的机械臂技术利用到柔韧性训练装置设计的犀牛建模图,该健身器械部件模型的建立包括了靠背、坐垫、控制把手、机械臂、主体机和支撑架的建模。

图3 犀牛建模图
2.2.3 渲染出图
该柔韧性训练装置的渲染出图采用leyshot软件来渲染,如图4所示。该装置的配色方案主要采用了黑白两色,给人简洁清爽的视觉效果。控制把手处的按钮采用了鲜艳的红色,可以让人方便的看到。

图4 柔韧性训练装置常态示意图
2.2.4 设计二维模型图
后期的二维模型线稿主要是用犀牛导入CAD中来完成的,如图5所示。
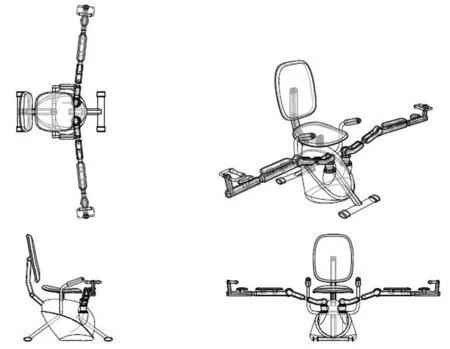
图5 二维模型线稿
3. 研究结果与分析
3.1 各主要零部件的状态和作用
柔韧性训练装置(如图6所示),包括了靠背、坐垫、控制把手、机械臂、主体机和支撑架。在主机体的上部设置坐垫;在主机体后部上方设置靠背;在主机体中部两侧设置控制把手;在主体机的前下部设置两个机械臂。两个机械臂包括分腿驱动装置、竖直轴、髋关节驱动装置、大腿支撑臂、膝关节驱动装置、小腿支撑臂;大腿支撑臂的两端分别通过髋关节驱动装置、膝关节驱动装置与竖直轴的上端、小腿支撑臂的一端相连;髋关节驱动装置包括髋关节电机,用于带动大腿支撑臂相对于竖直轴在竖直面内摆动;竖直轴下端通过分腿驱动装置设置在主机体上,分腿驱动装置包括分腿驱动电机,用于驱动竖直轴相对于主机体在水平面内摆动;膝关节驱动装置包括膝关节电机,用于带动小腿支撑臂相对于大腿支撑臂在竖直面内摆动,与小腿支撑臂垂直的脚底支撑板的下部与小腿支撑臂末端相连,脚底支撑板的上部设置有供前脚掌伸入的脚背固定环。

图6 柔韧性训练装置
3.1.1 靠背
靠背(如图7所示)可以作为支撑运动员后背所用,当腿部被机械臂举起,拓展柔韧时,可用于支撑。当进行体前屈柔韧拓展时,靠背可以通过扶手上的操作按钮等调节装置进行靠背前后角度的调节,同时给予运动员上体前倾的负荷压力,好似后面有人辅助压体前屈一样。
3.1.2 坐垫
坐垫(如图8所示)是主要起到支撑作用的部件,需要符合人体工程学的同时,也需要有机械部件使它随着不同的使用方式运动。坐垫支撑运动员的体重,同时保证运动员的身体姿态的完整和准确性。坐垫有调节高低的功能,以及前后倾斜角度的调节,与靠背倾斜角度的调节相互配合可以达到运动员平躺的效果。

图8 坐垫部件模型
3.1.3 控制把手
控制把手(如图9所示)是控制系统,需要方便的被使用者操作,由于操作系统是用来控制全身运动,因此选择可活动的操作手杆比固定的操作面板更合适。控制把手具有支撑身体平衡的功能。扶手上的操作按钮可以调节靠背、坐垫的前后倾斜角度,坐垫升降,以及腿部机械臂的屈伸、内收、外展、高度、伸缩,以及前后左右转动等功能的控制。

图9 控制把手部件模型
3.1.4 机械臂
机械臂(如图10所示)是整个柔韧性装置的执行机构。由于机械臂的每个关节只可以实现一种运动形式。竖直轴:活动范围很大,类似于人体的股骨头转动原理。保证完成大腿基本的生理转动。大腿支撑臂:根据运动员大腿长度可做伸缩调整。膝关节转动轴:类似于人体的膝关节活动原理,保证膝关节的屈伸。小腿支撑臂:可根据运动员小腿长度进行调节。跟腱及脚踝:支撑托板在跟腱及脚踝处形成支撑。脚底支撑板:对脚底形成支撑,脚背固定环固定脚背区域。

图10 机械臂部件模型

图11 主体机部件模型
3.1.5 主机体
主体机(如图11所示)是用来包裹内部电机的部件,不仅需要保护内部电机,更需要避免棱角,让使用者更安全的使用,因此选择圆润的造型最为合适。
3.1.6 支撑架
支架(如图12所示)主要提到稳定器械的作用,所以该部件选择了工字型样式,支撑架上固定防滑脚垫,稳固安全。

图12 支架部件模型
3.2 具体实施方式
柔韧性训练装置(如图13所示),包括主机体1,架杆11,坐垫2,靠背3,靠背杆31,两个扶手4,两个机械臂5,脚底支撑板6,脚背固定环7。所述的机械臂包括分腿驱动电机51、竖直轴52、髋关节电机53、大腿支撑臂上段54、伸缩调节螺纹管55、大腿支撑臂下段56、膝关节电机57、小腿支撑臂上段58、小腿支撑臂下段59。
3.2.1 柔韧性训练装置调整大腿支撑臂长度
参见图13所示,伸缩调节螺纹管55的两端分别通过螺旋方向相反的螺纹与大腿支撑臂上段54和大腿支撑臂下段56形成螺纹副。例如,伸缩调节螺纹管55通过左旋螺纹与大腿支撑臂上段54相连,通过右旋螺纹与大腿支撑臂下段56相连,大腿支撑臂上段54和大腿支撑臂下段56不转动,转动伸缩调节螺纹管55,伸缩调节螺纹管55即可同时旋入大腿支撑臂上段和大腿支撑臂下段内,后者同时从大腿支撑臂上段和大腿支撑臂下段内旋出,大腿支撑臂下段轴向移动,改变了大腿支撑臂下段与大腿支撑臂上段之间的轴向距离,从而调节由大腿支撑臂上段54、伸缩调节螺纹管55、大腿支撑臂下段56组成的整个大腿支撑臂的总长度。

图13 平躺状态的柔韧性训练装置侧视示意图
3.2.2 柔韧性训练装置分腿状态演示

图14 分腿状态的柔韧性训练装置立体示意图
参见图14所示,伸缩调节螺纹管55与小腿支撑臂上段和小腿支撑臂下段的连接结构相同。大腿支撑臂上段54通过髋关节电机53与竖直轴52的上端相连;大腿支撑臂下段56通过膝关节电机57与小腿支撑臂上段58相连;竖直轴下端分腿驱动电机与主体机相连。小腿支撑臂下段垂直的脚底支撑板6的下部与小腿支撑臂下段末端相连,脚底支撑板的上部设置有供前脚掌伸入的基本呈长方形的脚背固定环7。在小腿支撑臂上段上固定小腿肌肉支撑托板9,在小腿支撑臂下段上固定有跟腱及脚踝支撑托板10。支撑架12固定连接在主机体上并支撑在地面,使得本训练装置保持稳定。
3.2.3 柔韧性训练装置靠背、坐垫演示
参见图15所示,靠背3后部连接在基本上下方向上延伸的靠背杆31上,靠背杆的下部通过靠背驱动电机8连接固定在主体机后部的架杆11上(如图15)。靠背驱动电机带动靠背杆、靠背在竖直面内相对于架杆、主机体摆动。
坐垫2底部通过坐垫驱动电机连接在升降杆21的上端(如坐垫驱动电机壳体固定在升降杆上,坐垫驱动电机的转轴与坐垫固定连接),坐垫驱动电机带动坐垫相对于升降杆在竖直面内摆动。运动员坐在坐垫上,根据运动员自身分腿体前屈柔韧性以及横叉胯部外展的基础能力决定机械臂外展开度,靠背的调节加大运动员柔韧拓展的负荷压力。
通过带动升降杆上下移动的驱动装置连接在主体机上。升降杆上下驱动装置属于现有技术,如它包括升降杆驱动电机、螺母丝杠机构等。升降杆驱动电机的壳体固定在主体机上,升降杆驱动电机的转轴与丝杠固定,丝杠上有与丝杠配合的螺母,螺母与升降杆固定,升降杆位于主体机上的上下延伸的导向孔内。升降杆驱动电机动作,带动丝杠转动,螺母由于与升降杆固定只能轴向移动不能转动,所以螺母就带动升降杆一起沿导向孔上下移动,实现坐垫的升降。
3.2.4 柔韧性训练装置可编程控制器作用
可编程控制器与坐垫驱动电机、升降杆驱动电机、分腿驱动电机、髋关节电机、膝关节电机、靠背驱动电机产生电连接,与可编程控制器电连接的操作按钮设置在扶手上;通过操作按钮可以控制坐垫驱动电机、升降杆驱动电机、分腿驱动电机、髋关节电机、膝关节电机、靠背驱动电机的动作。

图15 靠背前倾、坐垫后倾时的柔韧性训练装置侧视示意图
3.2.5 柔韧性训练装置纵劈腿柔韧演示

图16 靠背放平、劈腿状态的柔韧性训练装置立体示意图
参见图16、17所示,在该种状态下,用于发展运动员的纵劈腿柔韧。右腿由右机械臂固定,保证膝关节和脚背伸直。调节靠背及坐垫的倾斜角度,达到和右腿保持水平延长的平躺姿态。由有机械臂固定的右腿被右机械臂缓慢抬起,达到拓展右腿柔韧性的目的,根据运动员自身特点及柔韧性的痛点来科学安全的调节机械臂举起的高度和角度,达到最佳拓展目的。左右机械臂可以交换发展柔韧性。

图17 靠背基本竖直、劈腿状态的柔韧性训练装置立体示意图
4. 结论与建议
4.1 结论
根据柔韧性训练研究的意义和应用前景,综合当前已有柔韧性训练器械的研究现状与发展前景,改进了原有器械的不足之处,解决了运动员的下肢的并腿体前屈、分腿体前屈、纵劈腿、横劈腿柔韧性的拓展训练。使运动员在独立、安全的环境中,无需辅助,自己就能完成柔韧性的练习,通过器械自身矫正其姿态,通过靠背的调节加大运动员柔韧拓展的负荷压力。充分的节省训练时间,保证运动员的安全,大大提高了训练效率,降低了运动训练中柔韧素质拓展的时间。科学有效的实施因人而异的柔韧拉伸,避免了由人为过失而带来不必要的运动损伤,延长了运动员的运动寿命。
4.2 建议
柔韧性训练装置基本达到了预先设计的要求,但由于设计者自身学科的限制,对于装置的操控系统还有待改进与完善。目前是信息化的互联网+时代,若要将训练装置更加智能化,更加便捷的通过远程发送指令进行具体设备的操作,以便于教练员在实施运动训练时可以通过移动终端发送指令进行该设备的操作,为其设备进行IP地址的分配,由于IPv6地址普遍使用,完全有可能在未来的设计中为任何一款电子训练装置设备植入相应的IP地址,已达到移动互联,远程操作的实际功效,希望能与有关学科交叉学习,不断地优化发展操作控制系统。
猜你喜欢
中老年保健(2022年6期)2022-08-19
食品与健康(2021年10期)2021-10-15
科技创新与生产力(2021年8期)2021-09-26
建材发展导向(2021年13期)2021-07-28
文萃报·周二版(2021年52期)2021-01-22
文萃报·周二版(2021年51期)2021-01-02
文萃报·周二版(2019年3期)2019-09-10
中国临床医学影像杂志(2019年6期)2019-08-27
当代体育科技(2017年5期)2017-11-28
红领巾·萌芽(2015年5期)2015-06-16