
双体工程辅助船波浪载荷
2018-11-01 04:59:36王福新任苗苗刘益清
造船技术 2018年5期
王福新, 任苗苗, 刘益清
(1.武汉东喻专利代理事务所, 湖北 武汉 430074; 2.华中科技大学 专利中心, 湖北 武汉 430074;3.武汉理工大学 交通学院, 湖北 武汉 430063)
0 引 言
双体船由于载荷状态复杂,因此其在波浪中的载荷计算[1-4]比较困难。国内外学者基于不同的假定和计算模型,各自提出有关双体船载荷计算的近似方法有:美国的Scott方法、Disenbacher方法,苏联的伏罗洛夫方法,日本的Unzawa和Shimizu方法;国内专家提出的相关简化算法(如孔炳庆方法)[5],毛筱菲[6]提出利用模型试验方法确定作用在双体船连接桥结构上的波浪诱导载荷,汪学良等[7]对双体船波浪载荷测试技术进行系统研究。
目前,双体船包括普通双体船、小水线面双体船以及后来发展起来的穿浪双体船。针对高速双体船,CCS《小水线面双体船指南》(2005)及《海上高速船入级与建造规范》(2012)对其波浪载荷计算有详细的规定;针对内河双体船,CCS《钢质内河船舶建造规范》(2009)对其载荷计算有详细的规定;而对于海上航行(主要是沿海航区)的中低速双体船,CCS《国内航行海船建造规范》(2012)及其2013、2014年修改通报虽没有给出具体的规范公式,但指出应基于波浪载荷直接计算或试验得到。因此,本文采用直接计算方法对双体工程辅助船所承受的波浪载荷进行预报。
1 计算模型的建立
预报双体工程辅助船波浪载荷需要建立水动力模型和质量模型。
1.1 船型资料
双体工程辅助船主要用于沿海航区为一些工程船供应货物。船舶的主要尺度及参数如表1所示。

表1 船舶的主要尺度及参数
1.2 水动力模型
对双体工程辅助船进行波浪载荷计算时,采用的是基于三维绕射-辐射及Morison理论为基础的WADAM程序[8],因此需建立水动力面元模型。HydroD模块的水动力模型如图1所示。

图1 HydroD模块的水动力模型
1.3 质量模型
质量模型对船舶波浪载荷计算的精度至关重要。质量模型和实船的质量重心差别越小,波浪载荷计算精度就越高。为此,需要实际统计全船各部分质量并按静力等效原则得到全船质量沿船长方向的分布,满载出港工况下的质量模型如图2所示。

图2 满载工况质量模型
2 水动力分析
波浪引起的船体载荷是随机统计量,在校核双体工程辅助船结构强度时,需要根据沿海航区的波浪统计资料(P-M波浪谱和中国沿海波浪散布图),将其置于相应的波浪环境中,计算其在波浪上的运动和诱导载荷[9]。
2.1 浪向频率和浪向
为充分研究双体工程辅助船的水动力性能,计算时:选取频率在0.20~1.80 rad/s范围,步长为0.05 rad/s,共计32个遭遇频率;选取13个浪向角,即在0°~180°之间,每间隔15°选取1个,等概率分布。沿船长方向共取9个剖面计算纵向波浪载荷;沿船宽方向共取5个剖面计算横向波浪载荷。计算航速取零,即Fn=0。
2.2 传递函数结果及分析
本文应用WADAM模块计算双体船的运动和各主要载荷的传递函数,并应用POSTRESP[8]模块显示传递函数的结果。
(1) 满载出港工况下的船体垂荡运动在13个浪向上的传递函数如图3所示。

图3 满载出港工况垂荡运动传递函数
(2) 满载出港工况下船体横向载荷传递函数如图4所示。
(3) 满载出港工况下船体纵向载荷传递函数如图5所示。

图4 满载出港工况横向载荷传递函数
为便于分析及后文计算规则波参数,表2总结了各响应对应的最不利波浪和传递函数的最大幅值。
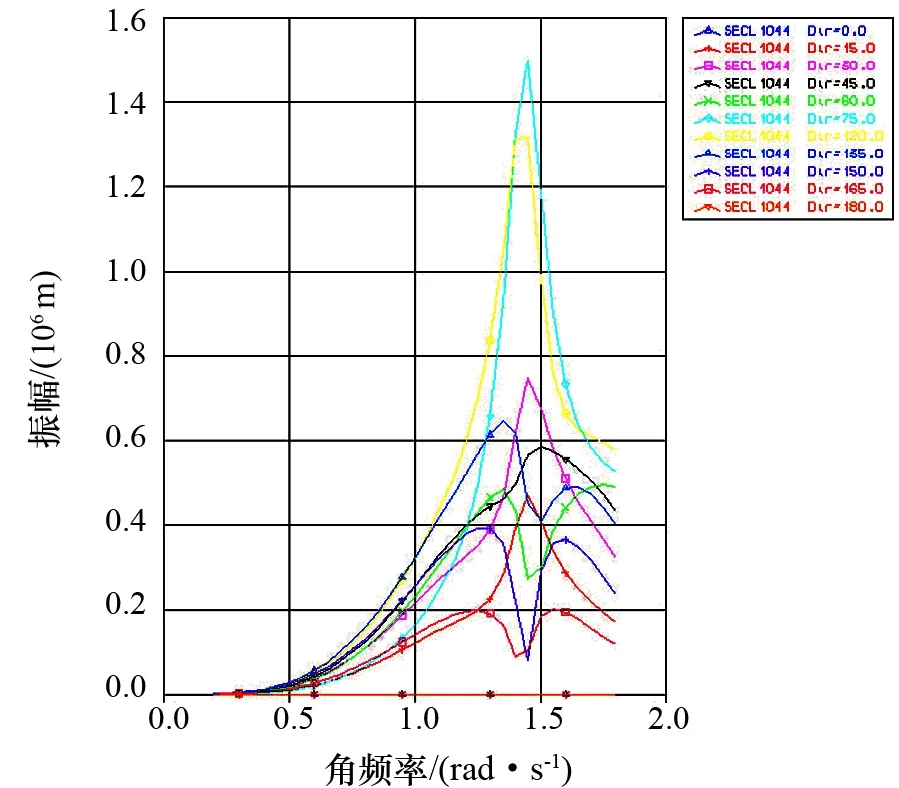
图5 满载出港工况纵向载荷传递函数

表2 传递函数
双体工程辅助船在波浪中航行,由于波浪的扰动会产生摇荡运动,其中对船体结构安全影响最大的是垂荡、纵摇和横摇3个运动分量。通过对3种工况下传递函数曲线和最不利传递函数最大幅值进行分析,可知该双体船的运动响应有以下几个特点。
(1) 双体工程辅助船的垂荡运动响应在横浪时达到最大,纵摇运动响应从横浪到顶浪逐渐增大,横摇运动响应在横浪时达到最大。垂荡、纵摇和横摇运动的传递函数最大响应幅值大多出现在频率为1.25~1.45 rad/s(波长大约在29.32~39.45 m)范围,即当船舶遭遇的波长与船长相近时,运动响应幅值最大。
(2) 通过比较分析,横垂向弯矩响应幅值大多在横浪附近时达到最大,并且满载出港工况下的响应幅值最大、压载到港工况下的响应幅值最小,响应峰值发生在波长船长比为0.84左右时。纵摇有关扭矩在艏(艉)斜浪时达到最大,满载出港工况下的响应幅值最大,压载到港和满载出港结冰工况下的响应幅值比较接近。
(3) 纵向扭矩在艏斜浪附近时响应幅值达到最大,压载到港工况下的响应幅值最大,满载出港结冰工况下的响应幅值最小。由此表明,双体工程辅助船在压载航行时的纵向扭转较为严重。
2.3 波浪载荷的长期预报
根据规范要求及研究需要,该船在不规则波浪上的运动和波浪载荷响应及其短长期预报计算采用P-M波浪谱。
(1)

SESAM/POSTRESP模块提供了2种波浪统计资料:世界范围波浪散布图(DNV-WW)和北大西洋波浪散布图(DNV-NA),分别用于疲劳强度分析(FLS)和极限强度分析(ULS)[10],它们并不适用于中国沿海航行船舶波浪载荷的长期预报。因此,本文在计算时以中国沿海波浪散布图[11]作为长期预报的参考海况,在POSTRESP模块中建立新的波浪统计资料。
分别对截面104纵向扭矩、截面203横垂向弯矩和纵摇有关扭矩进行长期预报。为更加直观地表述长期预报的结果,POSTRESP模块将长期预报结果以图片的形式显示出来。限于篇幅,此处仅列出满载装载工况下各主要载荷参数的长期预报曲线、各主要载荷参数的长期预报值在超越概率下和不同浪向上的分布,如图6、图7所示。

图6 LC1截面104纵向扭矩长期预报曲线
为便于分析,本文总结了满载工况下各主要控制载荷二十年一遇、二十五年一遇、三十年一遇及一百年一遇预报极值及其在超越概率下的预报值,如表3所示。

图7 LC1纵向扭矩长期预报值在不同浪向上的分布

表3 LC1给定超越概率下的长期预报值 106 N·m
从长期预报的结果可以总结出以下结论:
(1) 从表3可以看出,主要控制载荷参数二十年、二十五年及三十年一遇的预报极值在数值上很接近,结合规范要求,本文选取二十年一遇(超越概率为10-8)的预报极值来推导设计波参数。
(2) 3种工况下截面203垂向弯矩的长期预报值在不同浪向上的分布表现为双峰形式,极大值集中出现在连接桥与片体连接处,该处的结构形式在结构设计中要引起足够的重视。
2.4 设计波参数的确定
(1) 设计波波幅计算式为
(2)
式中:aW为设计波波幅;Aj为主要载荷参数的极值;Lj为主要载荷参数的长期预报值,概率水平取10-8(代表设计寿命至少为20年);j为主要载荷控制参数编号。
(2) 设计波波长计算式为
(3)
式中:λ为设计波的波长,m;g为重力加速度;ωa为主要载荷控制参数极值对应的波浪频率,rad/s。
(3) 设计波的频率等于主要载荷控制参数极值对应的波浪频率ωa。
(4) 设计波的浪向等于主要载荷控制参数极值对应的浪向角β。
(5) 设计波的相位等于主要载荷控制参数极值对应的相位角εj。
根据以上设计波参数计算公式,确定满载工况对应的设计波参数,如表4所示。

表4 LC1设计波参数
3 结论与建议
综合分析,从双体工程辅助船结构设计、驾驶及其理论研究等角度提出了建议与对策。
(1) 通过比较分析可知:双体工程辅助船的垂荡运动响应在横浪时达到最大,纵摇运动响应从横浪到顶浪逐渐增大,横摇运动响应在横浪时达到最大。通过长期预报可知,满载出港工况下截面203垂向弯矩的长期预报值在不同浪向上的分布表现为双峰形式,极大值集中出现在连接桥与片体连接处,该处的结构形式在结构设计中要予以加强,比如加强结构尺寸或单独设置加强结构,并对该处的结构受力情况进行校核,确保其结构强度满足要求。
(2) 横垂向弯矩响应幅值大多在横浪附近时达到最大,并且满载出港工况下的响应幅值最大、压载到港工况下的响应幅值最小,响应峰值发生在波长船长比为0.84左右时。纵摇有关扭矩在艏(艉)斜浪时达到最大,满载出港工况下的响应幅值最大、压载到港和满载出港结冰工况下的响应幅值比较接近。建议在驾驶过程中,尤其是满载出港工况下注意尽量避免双体工程辅助船斜浪航行,以减小船舶在艏(艉)斜浪时的纵摇扭矩,保证船体结构强度不受损坏。
(3) 纵向扭矩在艏斜浪附近时响应幅值达到最大,压载到港工况下的响应幅值最大,满载出港结冰工况下的响应幅值最小。由此表明,双体工程辅助船在压载航行时的纵向扭转较为严重。因此,建议在船舶驾驶过程中避免艏斜浪航行以减小船体结构的纵向扭矩,避免船体纵向结构尤其是连接处结构受到损坏。
猜你喜欢
智族GQ(2024年5期)2024-06-03 22:33:57
民航管理(2022年5期)2022-07-07 09:22:56
电子设计工程(2022年7期)2022-04-20 07:23:56
舰船科学技术(2021年11期)2021-12-12 08:49:20
深空探测学报(2019年5期)2020-01-19 01:34:46
环球时报(2019-11-06)2019-11-06 04:14:24
船舶标准化工程师(2019年4期)2019-07-24 07:21:14
经营者(2018年23期)2018-03-06 08:18:10
珠江水运(2017年14期)2017-09-08 06:48:23
广东造船(2014年2期)2014-04-29 00:59:59
