
双体清污船综合减摇自适应控制方法
2022-04-20 07:23:56殷秋雯罗春艳
电子设计工程 2022年7期
殷秋雯,罗春艳,孙 惠
(1.吉林农业科技学院机械与土木工程学院,吉林吉林 132101;2.吉林省航道管理局,吉林吉林 132013)
双体清污船的耐波性较好,航行速度较快,但在恶劣的海洋航行环境下,双体清污船会发生剧烈摇晃[1-2],这极大地影响了双体清污船上清污设备的正常运行[3]。为了实现对双体清污船的减摇控制,有些学者提出了基于分数阶自适应滑模的双体清污船减摇控制方法[4],通过测量双体清污船横摇运动的频率数据,采用分数阶自适应滑模建立双体清污船减摇控制模型,以此实现对双体清污船的减摇控制。但该方法的修正误差较大,不能对双体清污船航行的稳定性进行控制。
综上所述,该文在综合使用减摇鳍和减摇水舱的条件下,提出了双体清污船综合减摇自适应控制方法。
1 双体清污船舵鳍联合自适应控制
双体清污船具有耐波性高、航速快等优点,能够有效提高水面清污效率。但是船舶运动属于复杂的非线性运动,在航行中双体清污船不可避免地要面对垂荡、升沉、纵摇等运动,因此寻求有效的减摇控制方法,使船舶平稳航行,保证运动过程的安全性,是现在船舶控制的热点研究问题之一。对双体清污船的综合减摇进行研究,提高自适应控制能力,保证作业过程中的安全性,同时提高工作效率[5-6]。
根据参数分析,对鳍型和鳍容量进行设计,通过在船舶上安装减摇鳍达到对船舶减摇的目的[7-8]。但是,减摇鳍的安装会影响船舶的横荡和艏摇,且会增加船舶成本,在应用上存在一定限制。
操舵会使船舶产生一个横倾力矩,与减摇鳍相比,舵减摇设备成本较低,维修方便,且不会占据过多的船内空间[9-10]。进行舵减摇控制时对船舶参数敏感度要求较高,导致减摇控制难度高。随着计算机技术的迅速发展,舵减摇自适应控制系统已经能够达到自适应效果,但算法较为复杂,对操控器有较高要求,还需充分考虑其鲁棒性问题,在应用时限制条件较多。船体减摇受到的混合力矩如图1 所示。
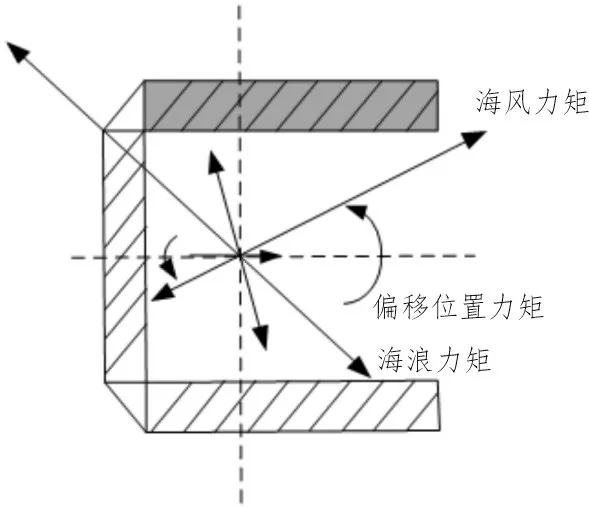
图1 船体减摇受到的混合力矩
船舶运动本质上是一个强耦合非线性运动,减摇鳍能够减小横摇幅度,独立设计使用时需要较大的鳍容量,与此同时也会产生艏摇,为克服艏摇,需要采用舵调节辅助方法。
综合考虑,舵鳍联合控制装置能够有效结合自由舵和减摇鳍的优点,对船舶综合减摇更具有现实意义,该文采用舵鳍联合控制装置实现对双体清污船综合减摇自适应控制[11]。联合控制器主要由传感器、舵机、鳍机和控制器等部分构成,利用船舶运动本身的六自由度耦合特性,将舵角和鳍角作为可用的控制量,将船舶的艏摇、横摇和横荡作为输出量,借助于舵鳍对振摇的耦合作用达到船舶减摇的控制[12]。
当受到海浪横摇干扰时,其横摇力和横摇角会通过传感器传递至控制器,控制器如同人体大脑一般作出判断,将命令传递至鳍机,减摇鳍作出反应,通过调节鳍角完成船舶减摇。当海浪带来艏摇干扰,艏摇力与艏摇角亦会通过传感器反馈给控制器,控制器对舵机下达命令,调整舵角以达到减摇的目的,保证船舶的平稳安全运行。传感器为硅压力传感器具有智能化、系统化和微型化的特点,采集到的信号稳定性强,不易受外界环境影响,数据时效性和可靠性强。该文采用的控制器为MFAC 控制器,该控制器具有较高的自适应控制能力,能够根据实时测量数据,完成横摇强度的判断并进行减摇参数的自主调试[13-14]。
2 双体清污船综合减摇自适应控制模型
船舶减摇系统具有时变性、高度非线性和强耦合复杂性的特点,须同时关注系统测量的实时数据和系统数据模型[15-16]。
双体清污船带有T 型翼,会受到攻角变化率、船舶状态、翼攻角幅值的约束,在模型设计时,应充分考虑船舶特征。双体船在航行时,T 型翼产生的升力不与轴向平行,且远大于其阻力,因此阻力及其力矩可以忽略,升力计算如下:

其中,FT为T 型翼产生的升力;C为升力系数;ρt为水舱内液体密度;S为翼型面积。
综合减摇结构如图2 所示。
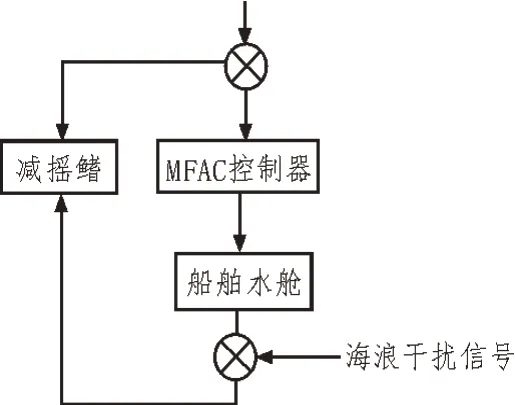
图2 综合减摇结构
外力作用会对双体清污船产生干扰力和干扰力矩,其中外力包括海浪、海风以及控制力的干扰,使双体清污船进行六自由度运动。六自由度运动示意图如图3 所示。
图3 中,Surge、Sway、Heave 分别表示船体平移运动的纵荡、横荡与垂荡,Roll、Pitch、Yaw 分别表示船体转动的横摇、纵摇和艏摇。
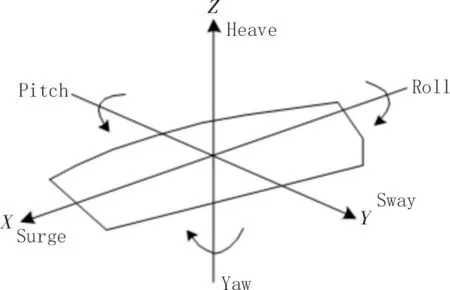
图3 六自由度运动示意图
将船体看作一个刚体,根据刚体动量矩定理和动力定量,建立船体运动模型,“船舶-舵机-鳍机”系统的横摇方程如下:

其中,x、y和z分别为艏摇角、横摇角和横荡角;Nt表示水舱在橫摇过程中产生的阻尼;s0表示边侧液舱中液体的表面积;R表示从边舱位置到船舶位置剖面的水平距离;λ表示船舱各个轴线之间的距离;h表示船舶重心位置;D表示船舶控制过程中产生的排水量;I1表示清理船舶过程中船舶转动产生的转动惯量;Jt表示舱内清理过程中船舶转动产生的转动惯量;KW表示由于海浪干扰而产生的力矩;KF表示船舶在稳定行驶过程中的力矩。
在“船舶-舵机-鳍机”系统的横摇方程约束下,分析双体清污船的运动特性,得到船体运动方程为:

其中,η表示清污船的总位移,υ表示清污船的移动速度,M表示移动惯性矩阵,J表示动力耦合矩阵,C表示航行负荷矩阵,L表示阻尼矩阵,g重力系数向量,τ表示作用在船体上的外力。
控制器CPU 能够根据输入信息产生与海浪干扰信号相对抗的控制信号,通过舵机和鳍机执行机构,产生等效波倾角用于抵消海浪倾角,使系统输出尽可能接近设定值,基于输入参数和实时数据进行离散化处理,建立空间模型完成系统的自适应控制。
3 实验研究
为了验证该文提出的双体清污船综合减摇自适应控制方法的使用效果,将基于分数阶自适应滑模的双体清污船减摇控制方法与该文所提方法进行对比实验。实验中,模拟的双体清污船海上航行条件为浪高1 m、双体清污船的航行速度为1 km/h,遭遇角为90°。双体清污船的相关实验参数:船长210.25 m,船宽30.55 m,吃水3.5 m,排水量19 000.25 t,重心高10.256 m,初稳心高3.8 m,固有周期14.30 m,晃动惯量0.95×103kg/m2。为了保证实验结果的有效性和严谨性,采用基于分数阶自适应滑模的双体清污船减摇控制方法和该文提出的双体清污船综合减摇自适应控制方法分别进行双体清污船减摇控制实验。两种控制方法的角度修正误差对比结果如图4 所示。
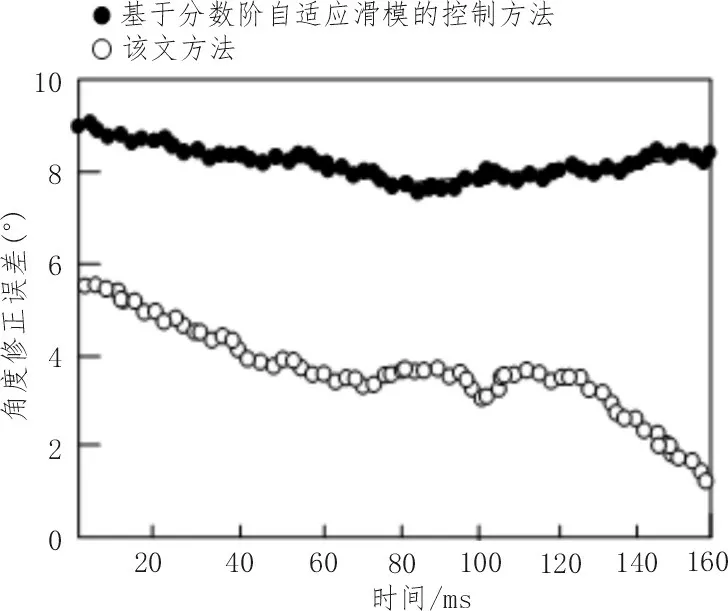
图4 两种控制方法的角度修正误差对比结果
通过对实验结果进行分析可知,在双体清污船所受外界环境相同的条件下,当双体清污船航行速度相同,随着航行时间的不断增加,基于分数阶自适应滑模的双体清污船减摇控制方法的修正误差较大,而该文提出的双体清污船综合减摇自适应控制方法的修正误差较小。
综上,该文提出的双体清污船综合减摇自适应控制方法的误差修正能力高于基于分数阶自适应滑模的双体清污船减摇控制方法,该文所提方法能够满足双体清污船的不同减摇要求。
基于以上两种方法的修正误差对比结果,针对不同方法对双体清污船的减摇程度进行对比实验。两种方法的减摇鳍船舶摇摆曲线对比实验结果如图5 所示。
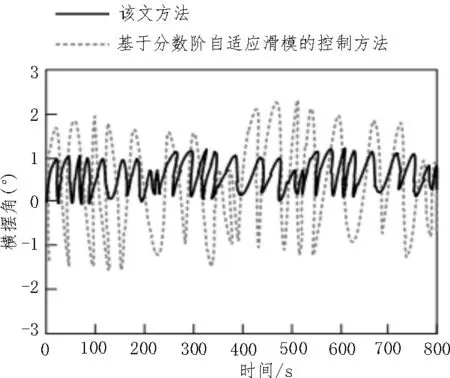
图5 减摇鳍船舶摇摆曲线对比实验结果
两种方法的减摇水舱船舶摇摆曲线对比实验结果如图6 所示。
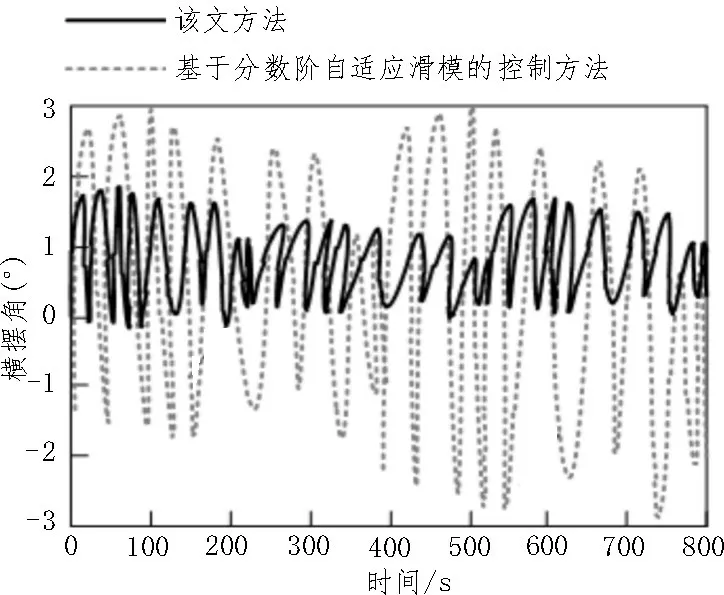
图6 减摇水舱船舶摇摆曲线对比实验结果
两种方法的船舶综合摇摆曲线对比实验结果如图7 所示。
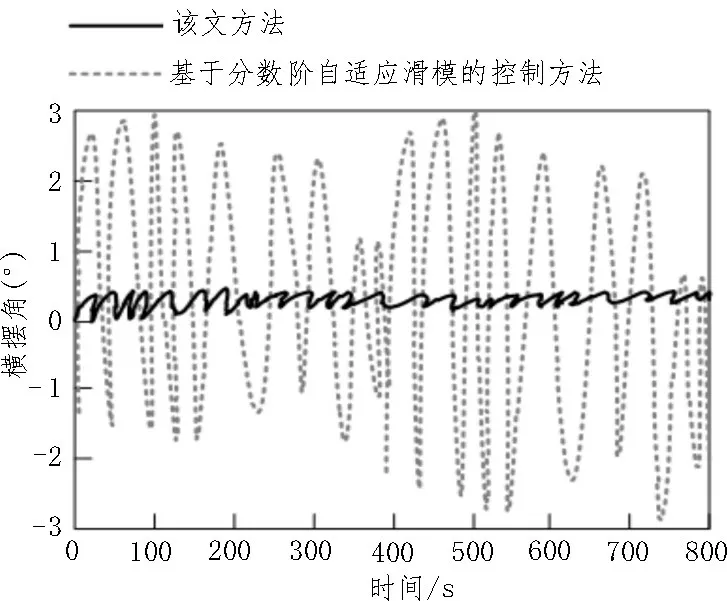
图7 船舶综合摇摆曲线对比实验结果
由实验结果可知,在该文提出的双体清污船综合减摇自适应控制方法控制下的双体清污船,其船体横摆运动的角度为-1°~2°之间,在双体清污船遇到恶劣海况快速航行时,双体清污船的横摆角度有小幅度的增加,在采用该文提出的双体清污船综合减摇自适应控制方法后,双体清污船的横摇运动减弱,双体清污船的稳定性较好。基于分数阶自适应滑模的双体清污船减摇控制方法下,双体清污船横摇运动的角度较大。由此可见,该文提出的双体清污船综合自适应减摇控制方法的横摆角低于基于分数阶自适应滑模的双体清污船减摇控制方法,该文控制方法可以更好地保证双体清污船的稳定性,鲁棒性较高。
根据不同控制方法下的双体清污船修正误差以及横摆角控制的实验结果可知,当双体清污船的减摇率相同时,在该文提出的双体清污船综合减摇自适应控制方法的控制下,双体清污船的角度修正误差较低,而在基于分数阶自适应滑模的双体清污船减摇控制方法的控制下,双体清污船的角度修正误差较高,说明该文方法能够更加有效地降低角度修正误差,并降低横摆角的幅度。
综上所述,该文提出的双体清污船综合减摇自适应控制方法优于基于分数阶自适应滑模的双体清污船减摇控制方法,该文控制方法的误差修正能力较好、横摆角较小。
4 结束语
随着经济社会的发展和人文活动的增加,不少生活废弃物进入到河流中,对湖泊和河流造成严重污染,急需高效的水面清污船进行清污处理。摇荡运动会对船只的安全性、适航性、船体设备与船员的正常工作造成很大影响。为保证清污船安全作业的同时,提高其自适应控制,使其在无人工参与的情况下实现高效顺利作业,该文研究双体清污船综合减震自适应控制方法。针对船舶横摇运动的不确定性,将自适应控制方法引入到双体清污船综合减摇系统中,采用舵鳍联合控制装置,满足设计要求,保证船舶清污工作高效安全完成,具有较高的应用前景。
猜你喜欢
深空探测学报(2019年5期)2020-01-19 01:34:46
船舶标准化工程师(2019年4期)2019-07-24 07:21:14
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电子测试(2018年15期)2018-09-26 06:01:04
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
船电技术(2014年3期)2014-06-27 05:45:36
