基于Ansoft Maxwell的水下无人航行器双体对转电机建模与仿真
2014-06-27 05:45:36张明周俊查智曾明
船电技术 2014年3期
张明,周俊,查智,曾明
(中国船舶重工集团公司第七一〇研究所,湖北宜昌443003)
基于Ansoft Maxwell的水下无人航行器双体对转电机建模与仿真
张明,周俊,查智,曾明
(中国船舶重工集团公司第七一〇研究所,湖北宜昌443003)
双体对转电机在舰船等对转推进系统中有着广泛的应用前景。本文运用Ansoft Maxwell 2D软件建立了双体对转电机的有限元模型,在双体对转电机有限元模型瞬态仿真的基础上对有限元结果进行了分析和讨论,证明了双体对转电机有限元建模以及分析计算的正确性,为水下无人航行器(UUV)推进系统的研发和设计提供了理论参考。
UUV 双体对转电机 有限元 Maxwell
0 引言
目前,水下无人航行器(UUV)在海洋探索研究以及国防等领域中正发挥着越来越重要的作用,水下无人航行器(UUV)航行过程中需要消除陀螺效应,以稳定航行姿态,因此较多的水下无人航行器(UUV)采用对转螺旋桨推进系统[2]。对转螺旋桨推进系统主要有三种实现方式:单轴电机通过行星齿轮转换为双机械输出、定子转子对转产生双机械输出、双体对转电机产生双机械输出。其中,行星齿轮结构复杂、效率较低;定子转子对转的电机结构较为复杂,且无法完全消除陀螺效应;双体对转电机增加了1个电机,但提高了螺旋桨的推进功率,结构也不复杂,另外,2个电机独立运行,互为热备份。
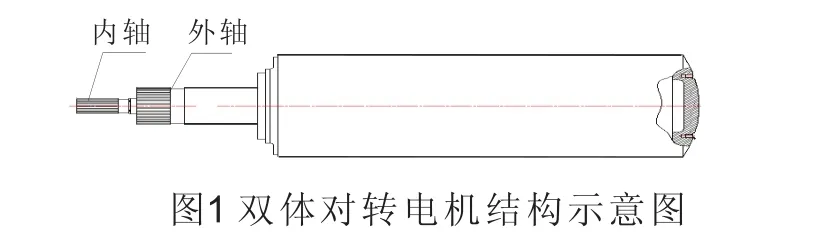
双体对转电机由前后两台同轴无刷直流电机组成,两台电机同轴安装于机壳内部,前端电机转轴部分为中空,作为双体对转电机的外轴,用于安装对转螺旋桨后桨;后端电机转轴通过前端电机中空轴,作为双体对转电机的内轴,用于安装对转螺旋桨前桨。双体对转电机结构示意图如图1所示。
1 双体对转电机有限元模型的建立
1.1 基本假设
1) 采用二维场模拟实际磁场;选取直角坐标系和国际单位制。2) 对定子槽口、定子扇形片的圆角及磁极冲片部分圆角、倒角等细微之处作近似处理。3) 忽略端部效应,磁场沿轴向均匀分布。4) 电机外部磁场所占分量甚小,可以忽略。定子外表面圆周为零矢位面。5) 不计交变磁场在导电材料中如定子绕组、铁芯冲片及机座中的涡流反应。
1.2 双体对转电机几何模型的生成
建立电机有限元模型的常用方法有两种:一是利用Autocad或者Solidworks等绘图软件绘制出电机的几何图形,然后导入到Maxwell 2D;二是利用RMxprt获得电机的精确模型,然后再导入Maxwell 2D进行FEA计算。本文采用的是第二种方法,得到的双体对转电机2D有限元模型如图2所示。
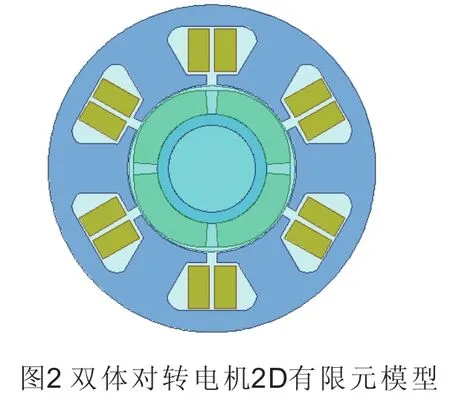
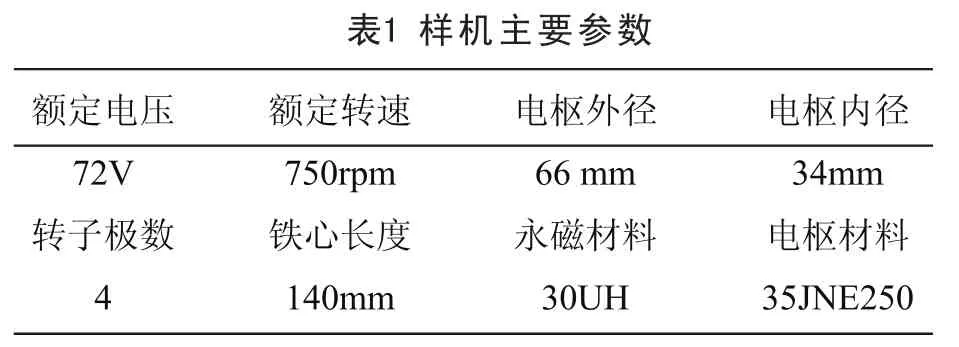
本文中双体对转电机样机整体采用6槽4极结构,使用分数槽集中绕组方案。电机定子铁芯以及转子铁芯均采用川崎35JNE250矽钢片,样机的主要参数如表1所示。
1.3 双体对转电机驱动电路模型
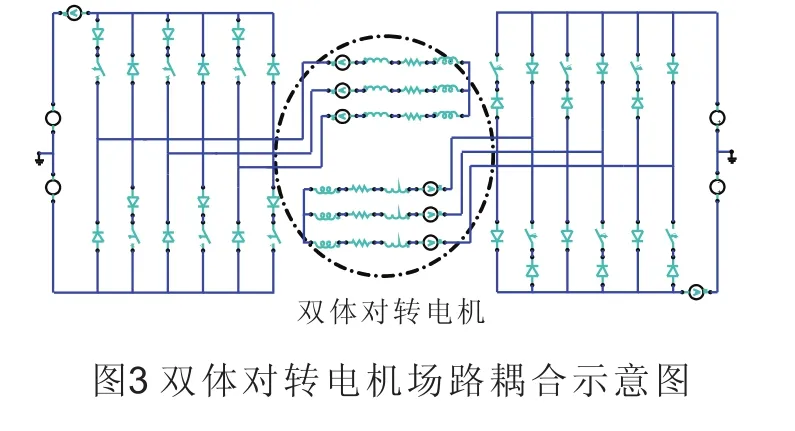
该双体对转电机样机采用的是无刷直流电机方案,因而需要采用逆变器作为激励源。对逆变器的建模,方法之一就是调用Ansoft Maxwell Circuit Editor提供的压控开关(Voltage Controlled Switch)模块和Diode模块,按照实际电路驱动系统的拓扑结构进行连接,即可很方便地搭建出三相全桥逆变电路,逆变器根据开关管触发逻辑模块提供的信号,顺序导通和关断,产生方波电流输出。另外,样机是由前后两台同轴安装无刷直流电机组成,所以本文需要采用两套独立的逆变电路对其供电。双体对转电机场路耦合示意图如图3所示。
2 双体对转电机仿真结果分析
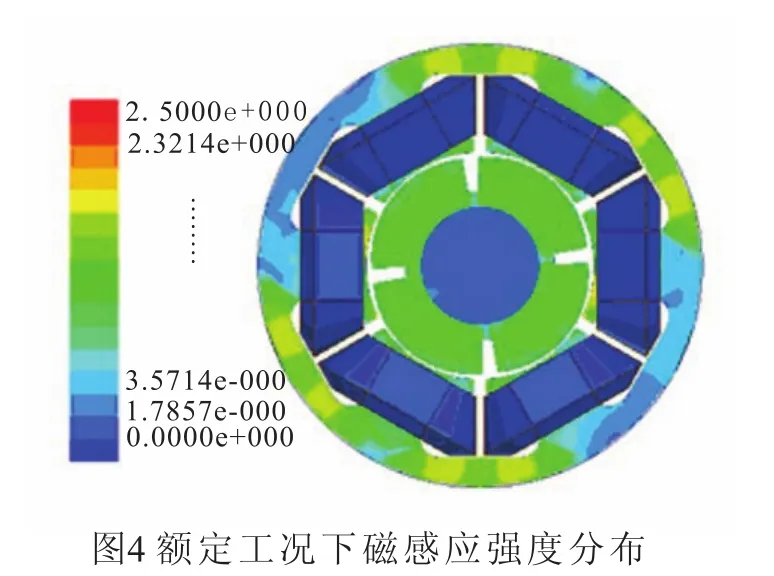
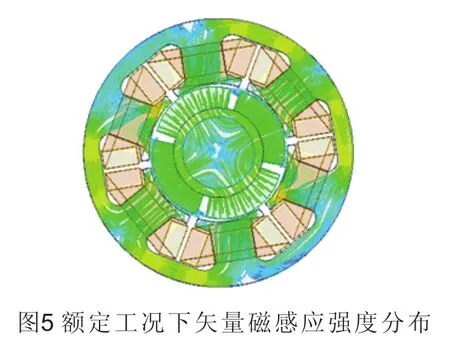
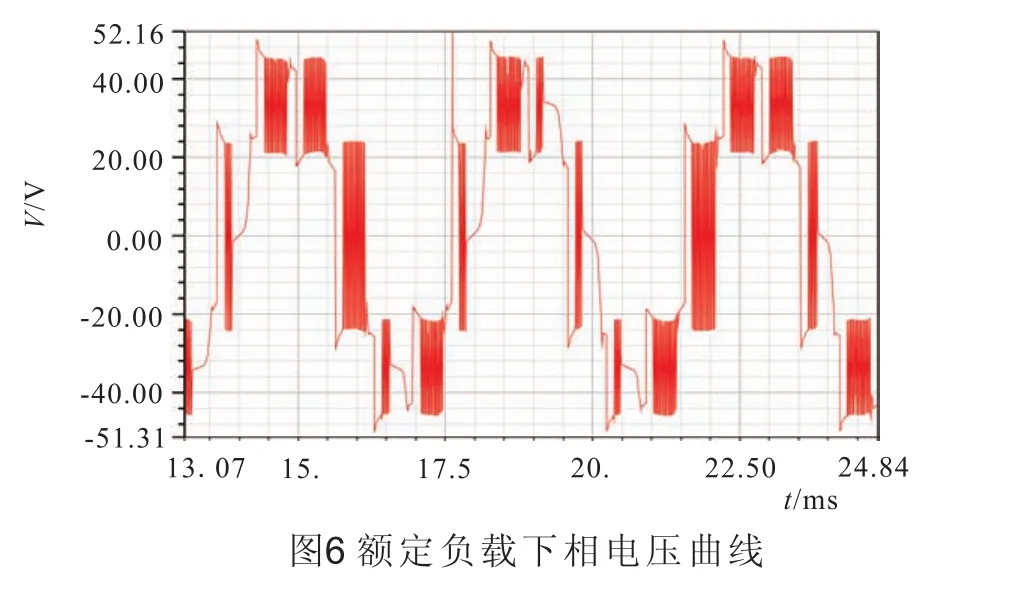
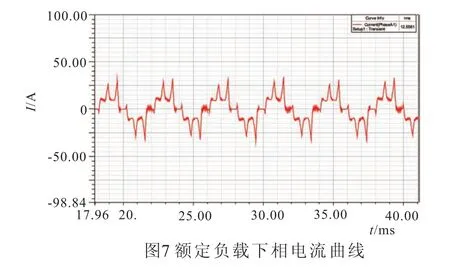
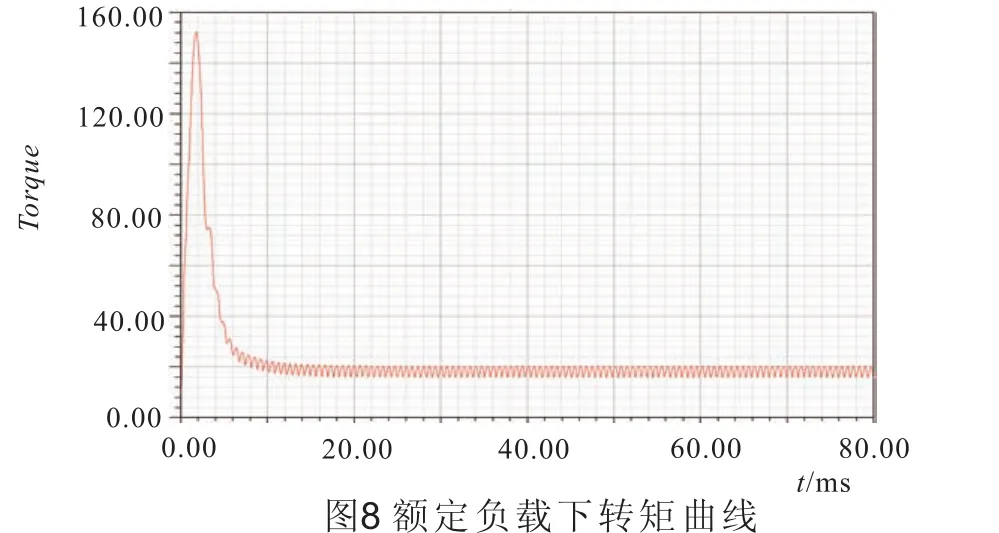
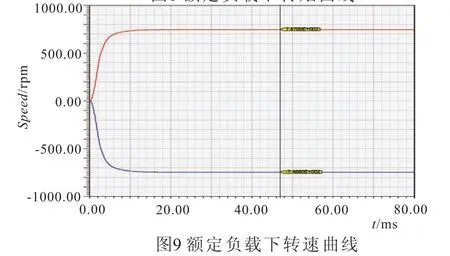
样机在额定情况下,即在母线电压为72 VDC、负载转矩为18 N.m的情况下进行了有限元分析计算,结果如图4~图9所示,其中图4为样机在额定工况下磁感应强度分布图,图5为样机在额定工况下矢量磁感应强度分布图,图6为样机在额定负载下相电压曲线,图7为样机在额定负载下相电流曲线,图8为样机在额定负载下转矩曲线,图9为样机在额定负载下转速曲线。
电机样机额定工况下的有限元仿真结果显示,样机磁场分布较为合理,无磁路饱和现象,如图4、图5所示;样机相反电势和相电流曲线如图6、图7所示,相电压幅值为45 V,相电流稳定后有效值为12.5561 A;由于样机为双体结构,且独立控制,电机额定负载启动后,双体对转电机内外轴均可以很快进入稳态,稳定后的转速大小约为±747 rpm(方向定义:轴视,顺时针为内轴正向、外轴负向,逆时针为内轴负向、外轴正向,下同),如图9所示,与理想额定转速有0.6%的误差,属于正常情况。
3 样机的实验测试
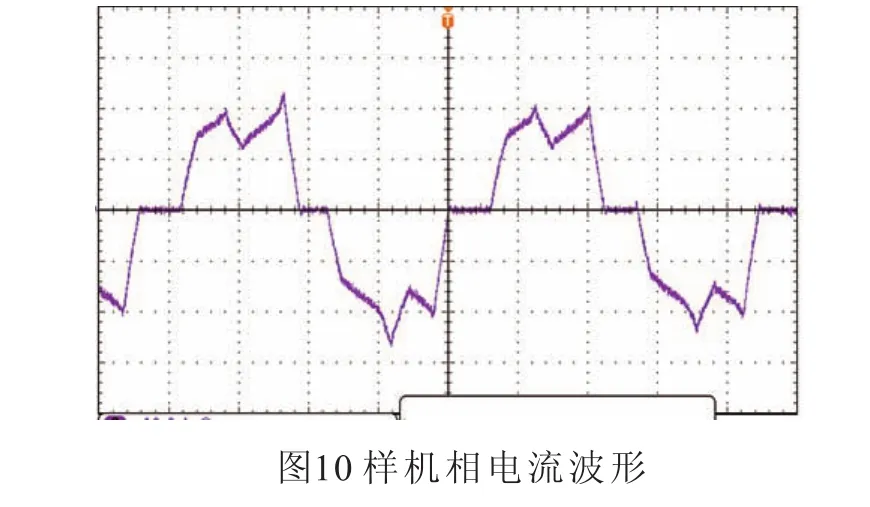
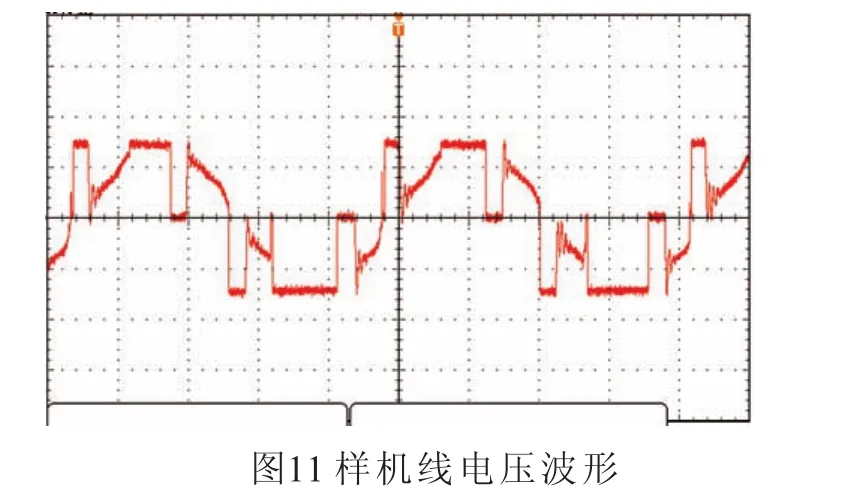
上文对双体对转电机进行了FEA建模和分析计算,为了对双体对转电机模型和仿真结果作进一步的验证,进行了样机的实验测试。样机在额定工况下的实测转速为±732 rpm,相电流和线电压如图10和图11所示,其中图10为样机相电流稳态波形,电流大小为13.6 A;图11为样机线电压稳态波形,其最大值约为72 V。
对比可见,双体对转电机样机实测数据与有限元仿真结果有一定差距,双体对转电机仿真结果额定转速为±747 rpm、相电流为12.5561 A、相电压为45 V,实测结果则为转速±732 rpm、相电流13.6 A、线电压72 V,其中相电压、线电压之间由于存在换算关系,可以认为基本一致,而转速和电流结果差异较大。经过分析,实测转速偏低、实测电流偏大原因可能有两点:一方面,样机是原理样机,加工及装配精度较低,加大了整机损耗;另一方面,在实际测试中,负载不稳定,可能略大于要求的18 N.m额定负载值。
4 结论
本文分析了水下无人航行器(UUV)推进用双体对转电机结构的特点,建立了Ansoft Maxwell 2D环境下的双体对转电机有限元模型,并运用Ansoft Maxwell 2D软件对双体对转电机进行了瞬态有限元分析计算。本文所建立的有限元模型能够较好地模拟真实双体对转电机的各种特性,仿真结果与理论分析一致,该仿真模型为进一步研究双体对转推进电机的控制策略和运行特性打下了基础。
[4] 张林森. 推进用永磁对转无刷直流电机的MATLAB仿真. 电机与控制应用[J],2010.
[5] 李燕. 对转永磁同步推进电机的Matlab建模与仿真.微电机[J],2011.
[6] 李宏. 采用PMBLDC的AUV对转螺旋桨推进系统建模与仿真. 系统仿真学报,2007.
Modeling and Simulation of Dual Contra-rotating Motors for UUV By Using Ansoft Maxwell 2D
Zhang Ming,Zhou Jun,Zha Zhi,Zeng Ming
(The 710th Research Institute,Yichang 443003, Hubei, China)
Dual contra-rotating motors have extensive application foreground in the propelling system of warship etc. The FEA model of double body contra-rotating motor is established by Ansoft in Maxwell 2D, and the FEA results prove the validity of the FEA model and computation, which provides the theory references for the development and design of the underwater unmanned vehicle (UUV).
UUV;dualcontra-rotating motors;FEA;Maxwell
TM351
A
1003-4862(2014)03-0033-03
2013-09-22
张明(1986-),男,工程师。研究方向:电机工程。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
电子设计工程(2022年7期)2022-04-20 07:23:56
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
深空探测学报(2019年5期)2020-01-19 01:34:46
船舶标准化工程师(2019年4期)2019-07-24 07:21:14
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
广东造船(2014年2期)2014-04-29 00:59:59
电测与仪表(2014年21期)2014-04-04 12:32:08