
基于机器视觉的铁路信号机房巡检机器人柔顺控制方法
2022-04-20 07:24贺昌寿
电子设计工程 2022年7期
贺昌寿,王 磊,尤 刚
(1.中国铁路成都局集团有限公司,四川成都 610000;2.成都地铁运营有限公司,四川 成都 610000;3.四川网达科技有限公司,四川成都 610000)
大部分铁路仍然建在偏远地区甚至隧道内,传统的铁路运行信号的巡检通常通过人眼进行判断,受外界的干扰影响较大,易形成视觉模糊甚至视觉虚影,无法保障无人值守车站信号设备安全可靠工作、工作环境无异常,因此,如何实时掌握无人值守车站信号设备和工作环境的状态,是目前亟需解决的问题[1]。文献[2]依据周边环境规划无碰撞最优路线,以障碍物与巡检机器人位置信息为基础,设计视觉采集模块、路线规划模块以及运动控制模块,利用蚁群算法规划机器人运动路线,完成巡检机器人在直线与曲线运动路线的导航。文献[3]提出一种基于力传感器重力补偿的机器人柔顺控制方法,采集机器人不同位姿下力传感器数据,实现机器人作业过程中对力和位置的双重控制,为机器人柔顺控制提供准确的受力感知,提高机器人对接触力的感知精度。
当前智能巡视机器人在各行业得到了广泛运用,但在信号设备维护中还是空白,为此,该文提出基于机器视觉的铁路信号机房巡检机器人柔顺控制方法。对于铁路信号机房巡检机器人柔顺控制方法的关键是保证巡检机器人对铁路信号的分辨性以及机器人对铁路突发事故巡检的灵敏性,因此,分析机器人视觉巡检原理,建立铁路信号巡检机器人的运动模型,调用计算机联锁算法、列控操作、CTC、智能电源屏、大功率UPS、信号集中监测以及ZPW-2000A 轨道电路,当设备板件工作指示灯异常时,通过信号集中监测系统实时报警,完成基于机器视觉的铁路信号机房巡检机器人柔顺控制方法的设计。
1 铁路信号流程闭环分析
铁路信号集中监测系统分为国铁集团层、路局集团层、车站采集层;三层之间通过数据网连接,数据网带宽不低于100 Mbit/s,端到端单向时延不大于50 ms。机器人巡检系统由车站采集层通过局域网接入铁路信号集中监测系统网络。铁路信号架构中所有机房巡检机器人信号主要分为两种,一种为颜色信号,一种为声信号,两种信号分别表示铁路车辆的运行状态和铁路轨道的使用状态,一旦两个信号发生冲突,就会出现铁道交通事故[4-5]。
应用GRB 颜色空间定位方法的识别原理,将图像的每帧数据转换成信号的形式输出,原理效果图如图1 所示。
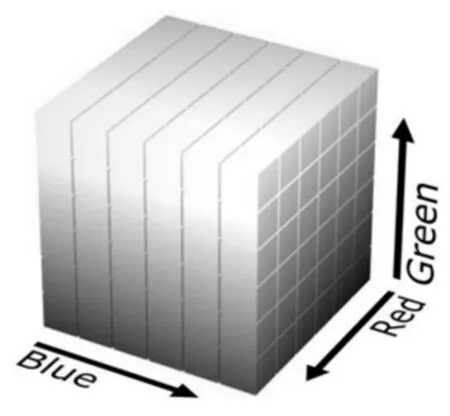
图1 颜色信号的空间转换效果图
观察图1 可知,在每时每刻,信号灯会受到外界光照、天气以及镜面的影响,使得正确的信号灯颜色传递出现偏差,GRB颜色空间定位方法是解决以上问题最有效的颜色信号识别方法。在GRB 颜色空间信号识别方法中设定红色、绿色、黄色3 种颜色的相关性最高,以便达到最高灵敏度[6-8]。利用GRB 颜色空间定位方法完成铁路信号的识别后,借助公式(1)完成信号特征的提取。

其中,p表示各种颜色代表的空间向量,μ表示信号转换因子,k表示颜色信号分量。
如果铁路轨道存在运行状态的列车,那么轨道入口的感知点会向铁路控制中心传递出繁忙信号,如果不存在运行状态的列车,感知点会向信号控制中心传递出空闲信号。一旦信号与预期铁路运输信号不同,应立即作出应急处理,防止铁路事故的发生[9-12],判断函数如式(2)所示:

其中,f(u)表示小波变换尺度函数,φ表示信号波动的频率,t表示信号预测的时间段,N表示离散傅里叶变换系数。
2 铁路异常信号报警判断方法
2.1 铁路信号机房巡检机器人参数设定
机器视觉比传统的人眼视觉的准确性高,机器视觉捕获信号主要通过摄像机标定以及图像边缘测试完成。为了达到机器视觉信号转换效果,信号集中监测系统实时将机械室设备报警信息传输至巡检机器人,巡检机器人根据接收到的报警信息,自动到达报警设备位置,自动识别报警板卡,通过图像对比智能分析复核报警信息的准确性,并将复核结果及确认图片传送至信号集中监测系统。然后通过信号集中监测终端,实现远程人工控制巡检机器人到达指定位置,按需求拍摄视频或图片,并实时通过信号集中监测网络通道传送至监测调阅终端[13-14]。机器视觉信号转换流程如图2 所示。
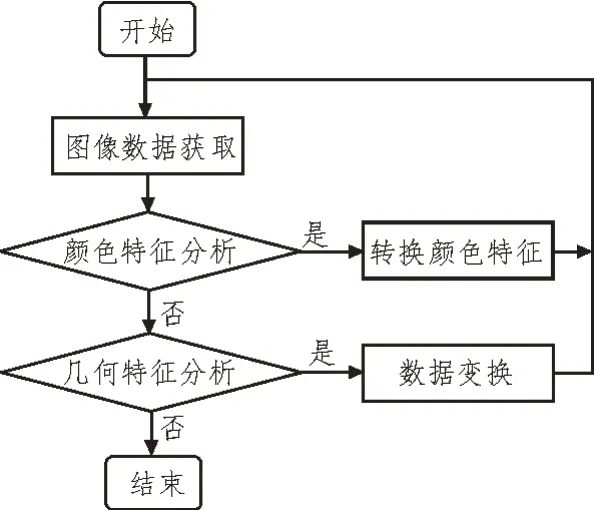
图2 机器视觉信号转换流程
软件标定页面控制如图3 所示。
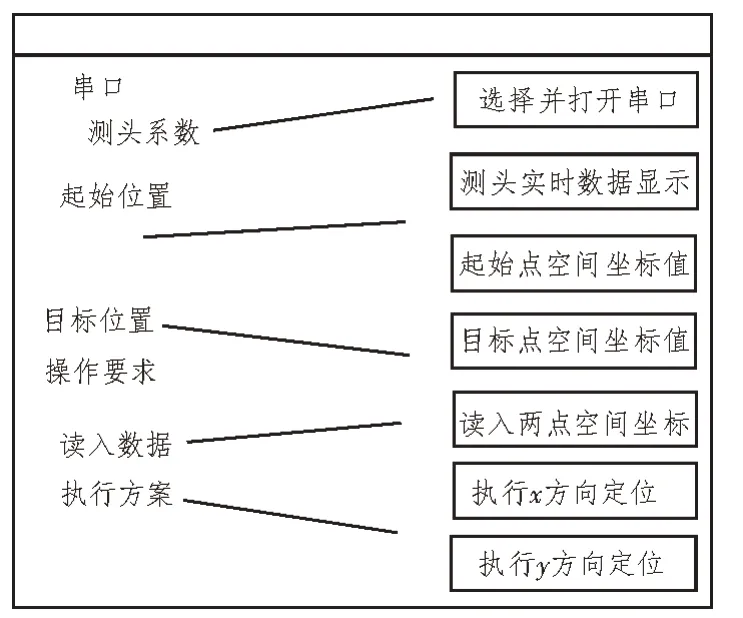
图3 软件标定页面控制
巡检机器是一个复杂性较高的自动控制机器,就目前各个领域对机器人的结构分析与功能设计来看,机器人最佳性能由6 个自由度以及6 个控制关节构成,过多或者过少的自由度和关节都会影响机器人的行动效果最大化[15-16]。机器人的自由度表示机器人各个肢节运动的最大限度,关节表示巡检机器人行动支配的关键点,其中巡检机器人关节向量和自由度变量公式为:
其中,xn表示机器人的关节点;fn表示机器人关节点的自由度。
巡检机器人最重要的特点就是协调性以及可行动性,因此,通过调节机器人的长、高、关键节点的位置,将机器人运动的效果最大化,机器人节点之间设置的标准参数为:

其中,τ表示机器人末端运行节点的力矩矢量;ιt表示巡检机器人可比矩阵的转置;F表示巡检机器人等效关节力的矩矢量;U表示作用力制约系数。
巡检机器人各个节点之间受力关系如图4所示。
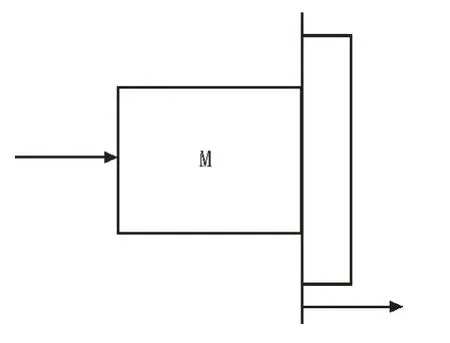
图4 巡检机器人各个节点之间受力关系
以上,完成了铁路信号机房巡检机器人的基本设计。
2.2 铁路信号机房巡检机器人柔顺控制
为了进一步地提高巡检机器人的性能效果,该文设计基于机器视觉的铁路信号机房巡检机器人柔顺控制方法。巡检机器人柔顺控制原理如图5所示。
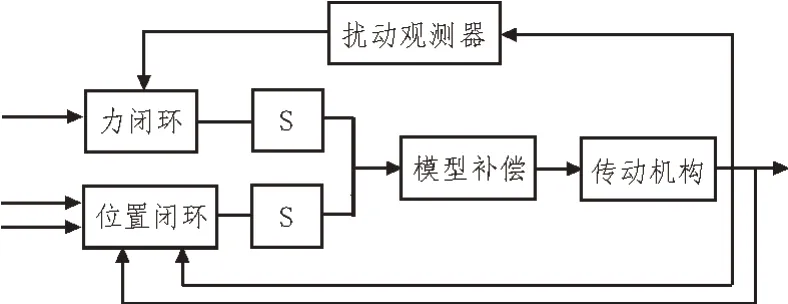
图5 巡检机器人柔顺控制原理
柔顺控制方法分为主动柔顺控制和被动柔顺控制,根据该文应用对象的特点,选择被动柔顺控制方法。巡检机器人的柔顺控制原理是将机器人的运动信息与执行器设定信息进行力与位的混合控制,构成一个动态行为调控关系,此方法最大的优点是不需要反向设计机器关键节点的布置,既减少巡检机器人控制的任务量,又提高控制精度。具体的巡检机器人柔顺控制算法如式(5)所示:

其中,sd表示巡检机器人关节空间刚度矩阵,δ表示关节位置的偏移量和关节之间的静态关系,θ表示巡检机器人末端节点的误差,ρ表示巡检机器人关节空间刚度系数。
3 实验分析
通过以上的论述,完成了基于机器视觉的铁路信号机房巡检机器人柔顺控制方法的设计,为了检验此方法是否具有有效性和可行性,进行实验测试。
实验测试采用基于传感机器人的铁路信号机房巡检机器人柔顺控制方法和基于人工智能技术的铁路信号机房巡检机器人柔顺控制方法,完成对比测试。
由于测试的特殊性,该文搭建测试环境,并按照如下步骤进行实验:
1)在铁路管理中心选取一段时长为10 min 的铁路行驶视频,然后通过数据帧提取技术,将视频内有效的铁路信号灯图像进行提取,并将提取的铁路信号图像传入到虚拟软件内,测试软件会在实验测试过程中模拟铁路的运行。
2)为了最大程度地提高实验结果的对比性,实验会随机变更铁路信号的顺序。信号变更顺序的原则是驱使巡检机器人作出一些基本的行为导向,实现巡检机器人柔顺控制性能的检验。
3)根据该文设计的目的,设计铁路信号机房巡检机器人的基本交互行为测试。
4)将3 种方法分别移入到3 台计算机,计算机分别连接3 个型号相同的巡检机器人,等待实验测试。一切准备操作完成后,同一时间触发3 个测试环境,开始实验测试,计算机同时记录每种方法测试产生的实验数据,为实验的分析奠定数据基础。
5)当该文设定的铁路信号全部变换结束1 min后,结束实验,整理实验数据和实验场地,进行实验数据的分析。按照该文设计的实验流程完成测试,得到的实验结论如下所示:
根据计算机捕获的实验数据绘制实验测试示意图,如图6 所示。
图6 是实验测试过程中,在不同柔顺控制方法下铁路信号机房巡检机器人关节的转矩幅度,可以观察到3 个波动曲线,其中曲线1 的有效波动范围最大,曲线2 的有效波动范围最小,因为在铁路信号正常的情况下,机器人关节的波动幅度越小,发生意外时,机器人的应急反应越可靠,因此可以证明基于机器视觉的铁路信号机房巡检机器人柔顺方法具有较高的稳定性。
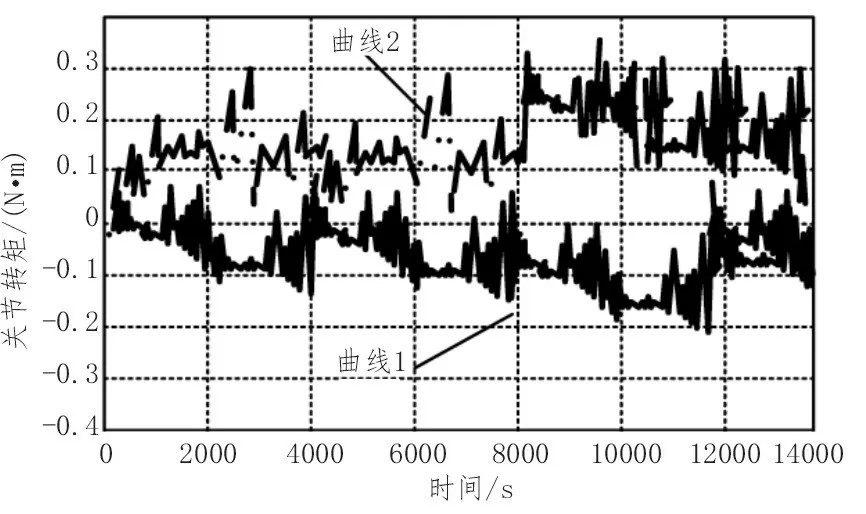
图6 巡检机器人关节转矩实验结果
铁路信号出现特殊变更时,铁路信号机房巡检机器人需要作出执行动作,在动作执行过程中碰撞到实验测试设计的障碍物时机器人关节转矩的波动曲线如图7 所示。

图7 实验测试巡检机器人碰撞实验结果图
由图7 可以直观地得出,对比其他传统的两个巡检机器人柔顺控制方法,该文设计的基于机器视觉的铁路信号机房巡检机器人在执行信号变更指令过程中,受到障碍物的碰撞时,各个关节转矩的无效波动幅度最小,并且机器人肢体波动幅度的平均值为0.65%,可以更好地控制巡检机器人的行为,不受外界因素的干扰。
4 结束语
1)基于机器视觉的铁路信号机房巡检机器人采用非接触式检测方式,以铁路信号机房为具体优化环境,通过监测系统终端控制巡检机器人,报警信息及图形信息通过监测网络传输、监测终端机展示,提高铁路信号监测系统的交互性。
2)以运动模型为基础,利用机器的标定、巡检图像的边缘检测方法实现机器的自动视觉巡查,构建铁路信号机房巡检机器人的运动模型,完成铁路信号机房巡检机器人柔顺控制方法的设计,提高铁路信号机房巡检机器人的灵敏性和可控性。
3)在未来的研究中,基于该文研究成果,可以单独优化铁路行驶信号灯变更的可控性,提高铁路运输的安全性。
猜你喜欢
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
云南画报(2021年12期)2021-03-08
云南画报(2021年12期)2021-03-08
铁道通信信号(2019年8期)2019-10-10
铁道通信信号(2019年6期)2019-10-08
建材发展导向(2019年5期)2019-09-09
电子制作(2019年24期)2019-02-23
电影(2018年8期)2018-09-21
山东工业技术(2016年15期)2016-12-01
