
针对低轨卫星移动通信终端的无源定位技术
2022-04-20 07:24:10朱国富
电子设计工程 2022年7期
朱国富
(中国西南电子技术研究所,四川成都 610036)
随着卫星移动通信技术的发展,低轨卫星系统越来越受到重视,与静止轨道卫星相比,低轨卫星移动通信系统的轨道高度低,其发射功率大大降低,具有传播时延短、路径损耗低等优点,通过多星组网,可以实现真正意义上的全球覆盖[1-3]。目前,低轨卫星移动通信系统正在蓬勃发展,并在民用和军事领域得到了广泛应用[4-7]。因此,对地面通信终端无源定位的需求也越来越多。低轨卫星移动通信系统地面通信终端定位的常规方法,都是将地面通信终端作为一般的辐射源进行定位,没有充分利用自身系统的特点。
低轨卫星移动通信系统相对静止轨道卫星通信系统来说,由于低轨卫星平台的相对高速运动,在卫星和地面终端之间的发射信号和接收到的信号之间会存在多普勒频移[8-9]。低轨卫星移动通信系统为了充分利用信道带宽,同时避免不同位置通信终端发射信号的多普勒频移造成相邻信道之间的干扰,采用了“多普勒频移预补偿”的工作方式,即通信终端根据与卫星之间的多普勒频率预计,对发射信号的频率进行反方向的多普率频移预补偿,使得卫星平台接收到的通信终端信号频率为标称的分配频率,从而避免频率冲突[10-13]。同时,低轨卫星移动通信系统为了充分利用信道资源,统一对信道资源进行动态分配,在地面终端业务申请阶段通过网控信号指定通信终端工作频率[14-16]。
该文提出了一种基于低轨卫星移动通信系统地面通信终端“多普勒频移预补偿机制”的新型定位方法,该方法充分利用低轨卫星移动通信系统体制特点,获取补偿频率信息,反推地面通信终端与卫星的位置关系,从而实现地面终端的定位。该方法能够减少定位站的数量,降低地面终端无源定位系统的复杂度。
1 基于“多普勒频移预补偿机制”的地面终端定位方法
1.1 定位原理
定位原理如图1 所示,定位站通过卫星星历获取卫星的地心地固坐标系空间位置(xS,yS,zS),以及速度向量(vx,vy,vz),接收、处理下行信号,解析网控信号,获取通信终端临时身份识别码及通信频率分配信息,通过频率映射表,得到分配给通信终端的通信发射工作频率fA。
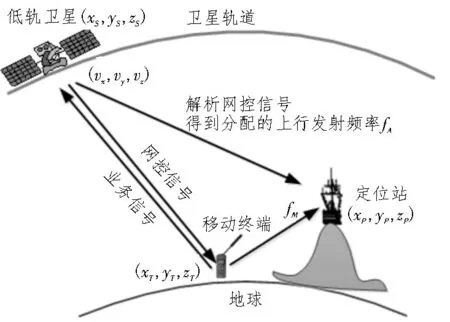
图1 定位原理示意图
定位站接收、处理通信终端上行信号并进行信号频率测量,获得通信终端实际发射频率fM。
根据通信终端通信发射工作频率fA和通信终端实际发射频率fM进行多普勒频移估计,通过通信终端补偿机制,获得通信终端相对卫星的多普勒频移fd=fA-fM。
根据地心地固坐标系的空间位置坐标(xS,yS,zS)、速度向量坐标(vx,vy,vz)和通信终端通信发射工作频率fA,计算满足卫星多普勒频移fd与地面终端位置(xT,yT,zT)的分布曲线:
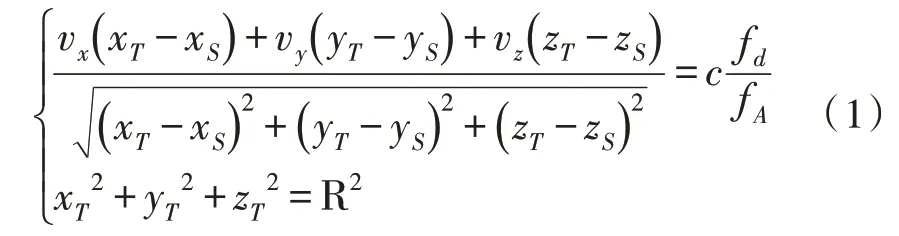
式中,c为光速,R 为地球半径。
同时,接收通信终端上行信号,对通信终端发射信号进行干涉仪无源测向,获得通信终端相对于定位站(xP,yP,zP)的方位角θ和俯仰角φ的坐标(θ,φ)。
利用干涉仪测向获得的通信终端相对定位站(xP,yP,zP)的方位信息示向线,结合满足卫星多普勒频移fd与地面终端位置(xT,yT,zT)的分布曲线,可得如下方程:

通过上述方程进行定位解算,求出通信终端位置,从而得到通信地面终端无源定位结果。
1.2 系统设计
基于地面通信终端“多普勒频移预补偿机制”的定位系统如图2 所示,系统包含星历预测模块、频率信息提取模块、信号频率测量模块、干涉仪测向模块、多普勒频移估计模块、基于多普勒频移的目标位置分布曲线计算模块和定位解算模块。
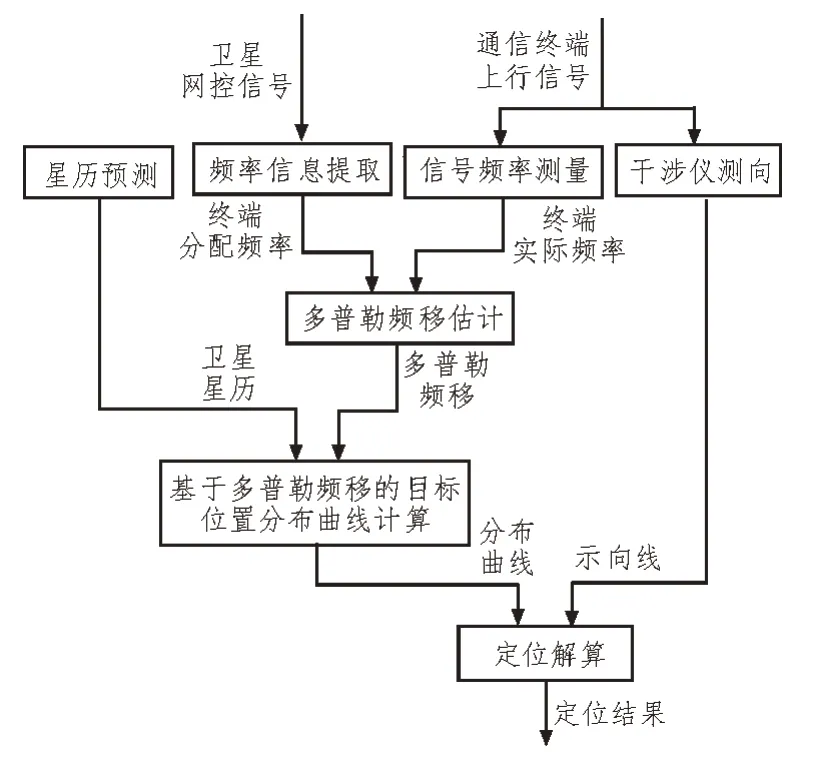
图2 定位系统组成框图
系统定位解算的处理流程如下:
1)星历预测模块实时获取卫星广播的星历信号,获得卫星位置信息和速度向量;
2)频率信息提取模块接收卫星下行网控信号,利用非协同信号处理以及协议分析方法,实时获取给通信终端分配的通信频率;
3)信号频率测量模块接收通信终端上行信号,测量获取通信终端发射信号的实际频率;
4)频率信息提取模块与信号频率测量模块同时将上述获取的分配通信频率和实际频率送入多普勒频移估计模块;
5)多普勒频移估计模块利用实际频率与分配频率的差来估计获得的通信终端相对卫星的多普勒频移;
6)目标位置分布曲线计算模块基于多普勒频移估计模块估计获得的多普勒频移,根据星历预测模块传送来的卫星星历,进行满足多普勒频移条件的目标位置分布曲线计算,将解算出的通信终端可能位置分布曲线送入定位解算模块;
7)定位解算模块利用通信终端相对定位站的方位信息示向线和通信终端位置分布曲线,求解通信终端位置,得到通信地面终端无源定位结果。
1.3 应用场景
该定位系统可应用于旋翼无人机、舰船、塔站等慢速运动或固定平台,通过对地面移动终端上行信号进行测频及测向,同时对终端下行网控信号进行解析,得出分配给终端的上行发射频率,结合多普勒频移估计及测向结果进行定位解算,得出目标无源定位结果。系统的应用场景如图3 所示。
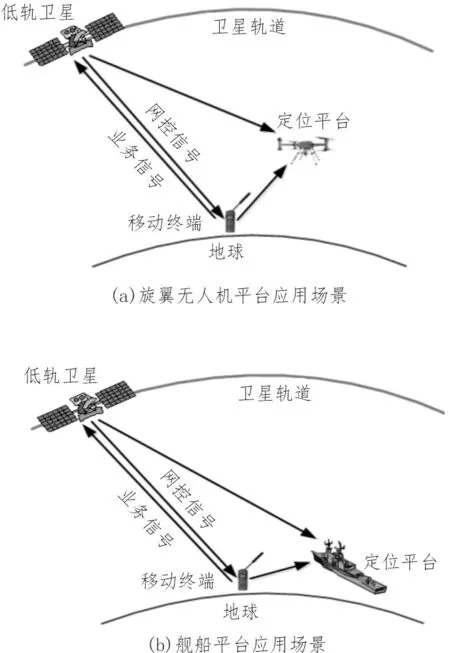
图3 定位系统的应用场景示意图
2 仿真实验及分析
在针对低轨卫星移动通信地面终端的无源定位仿真实验环境中,设置测向定位站点与目标距离约为400 km,卫星参考铱星系统,参数设置:卫星高度为785 km,卫星移动速度为7.46 km/s,通信频率为1.6 GHz。
根据卫星参数设置,卫星速度方向矢量分别设置为[0 0 1]、[0 1 1]和[1 0 1],其频移分布曲线分别如图4~6 所示。可以看出,不同方向的速度矢量是影响频移分布曲线的主要因素。因此,在选择定位站位置时,需要考虑卫星的运动方向,使得定位站与移动终端的测向方向与其尽量正交,以使系统误差导致的定位误差范围最小。
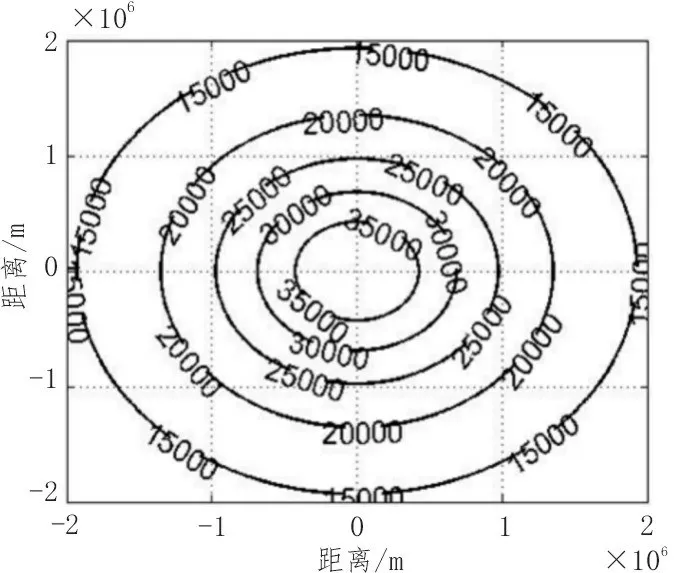
图4 速度矢量[0 0 1]条件下的频移分布
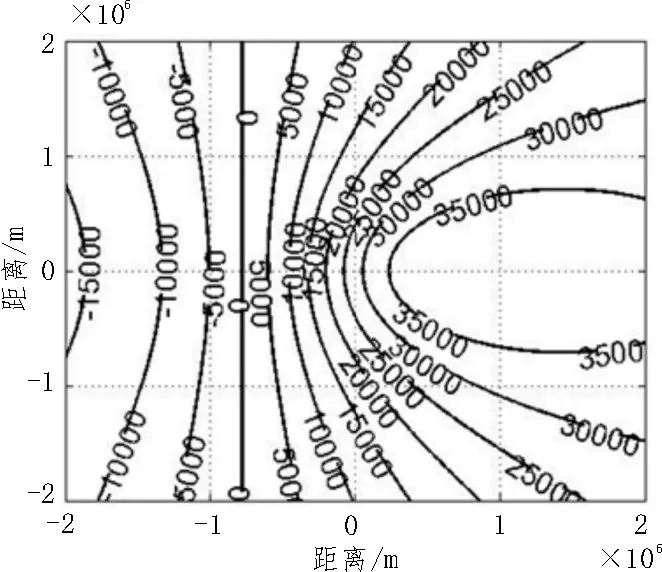
图5 速度矢量[0 1 1]条件下的频移分布
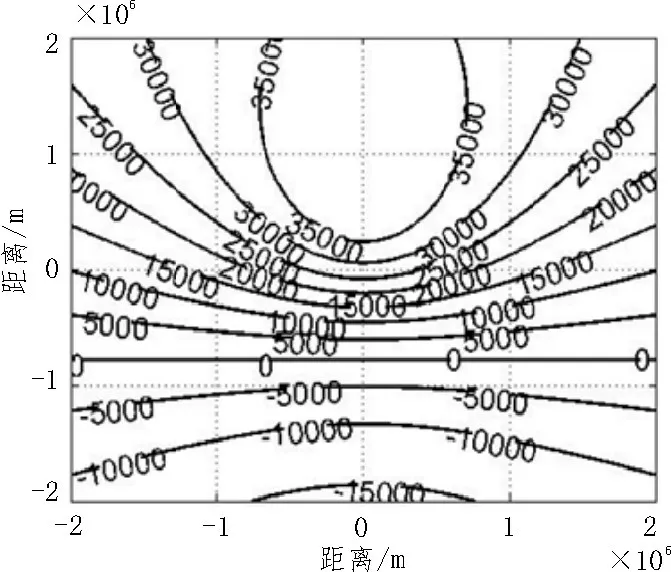
图6 速度矢量[1 0 1]条件下的频移分布
当设定卫星速度矢量为[1 1 1]时,测向定位的仿真结果如图7 所示,参数设定位站的测频误差为100 Hz,测向误差为1°。
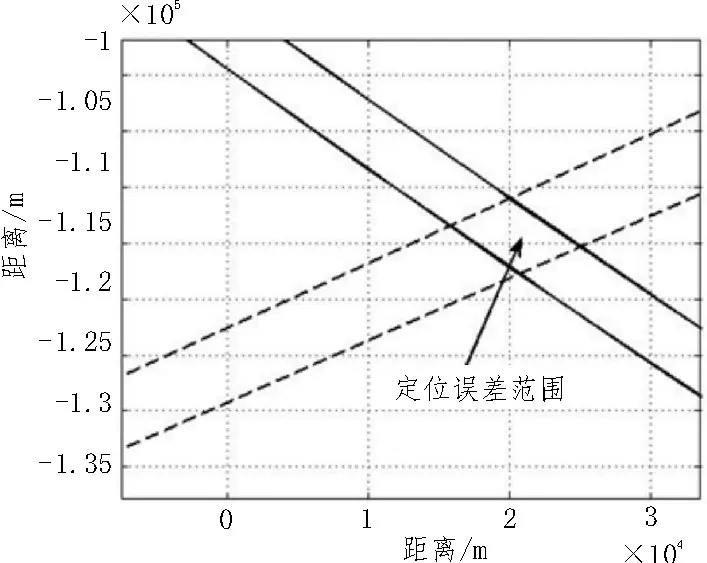
图7 定位仿真
根据图7 可以看出,在定位站与通信终端的距离约为400 km,测频误差为100 Hz,测向误差为1°的条件下,定位误差范围约为4 km×6 km 的带状区域。
当测频误差为1 kHz,测向误差为1°时,对应的定位仿真结果如图8 所示。
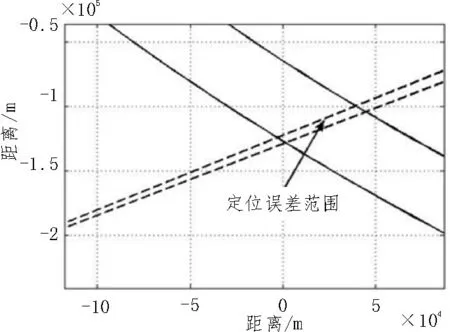
图8 定位结果
从图8 看出,在测频误差为1 kHz,测向误差为1°的条件下,定位误差范围约为4 km×48 km 的长条型带状区域。
当测频误差为1 kHz,测向误差为2°时,对应的定位仿真结果如图9 所示。
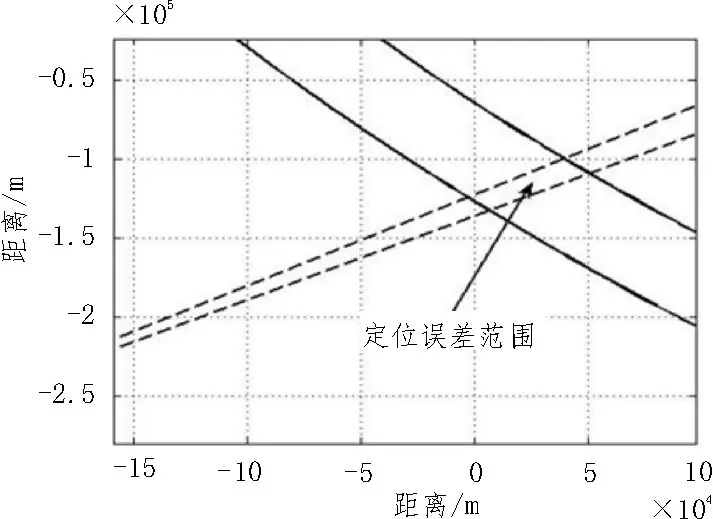
图9 定位结果
从图9 看出,在测频误差为1 kHz,测向误差为2°的条件下,定位误差范围近似8 km×51 km 的块状区域。
根据仿真结果可以看出,在测向误差固定的情况下,影响定位精度的主要因素是测频误差,而在固定测频误差的情况下,影响定位精度的主要因素是测向误差。在当前定位系统中,测向精度基本能保证在1°的情况下,测频误差是影响定位精度的主要因素。
3 结论
该文针对低轨卫星移动通信地面终端的无源定位问题,利用低轨卫星通信系统通过网控信号指定通信终端工作频率、通信终端对发射信号频率进行反方向多普勒频移预补偿这一特点,通过获取补偿频率信息,反推地面通信终端与卫星的位置关系而定位。相比以往双星或双机时频差定位方法,减少了定位站的数量,降低了系统复杂度,相比单星或单机平台多次测向交汇的方法缩短了定位时间。
仿真实验表明,这种定位方法在定位站与通信终端距离约为400 km,测频误差为100 Hz,测向误差为1°的条件下,能将定位误差范围限定在24 km2的区域范围内。目前系统中定位精度的主要影响因素是测频误差。另外应尽量考虑定位站的位置,使得通信终端的测向方向与卫星速度方向尽量正交,降低卫星速度方向对定位精度的影响。
猜你喜欢
遥测遥控(2020年3期)2020-09-17 13:38:46
现代装饰(2020年8期)2020-08-24 08:22:58
铁道通信信号(2019年9期)2019-11-25 01:44:58
电子制作(2016年15期)2017-01-15 13:39:14
现代计算机(2016年34期)2016-02-28 18:35:40
电子器件(2015年5期)2015-12-29 08:43:38
电子科技(2015年2期)2015-12-20 01:09:10
四川水力发电(2014年2期)2014-12-02 04:22:24
自动化博览(2014年4期)2014-02-28 22:31:14
机械与电子(2014年2期)2014-02-28 02:07:47
