
基于输电线路智能化无人机巡检装置研究与实现
2018-10-31 08:01申静
山东电力高等专科学校学报 2018年5期
申 静
(四川化工职业技术学院,四川 泸州 646006)
0 引言
在保障电力安全生产诸多环节中,电力巡检非常重要,一直以来,电力巡线是国家电网公司巡检工作中的一个瓶颈,现行大部分输电线路的巡检作业方式是人工巡检,不仅劳动强度大、工作条件艰苦,而且容易出现漏检、巡检不到位、数据录入不及时等问题[1-2]。由于四川处于丘林和山川地域,一旦遇到电网紧急故障和异常气候条件,巡检人员要依靠徒步行走、利用普通仪器或肉眼来巡查设备缺陷,这种巡检方式不仅效率比较低,而且影响电力系统的稳定运行;给生产与生活带来极大不便,随着对电力稳定运行要求的日益提高,这种方式已经不能完全适应现代化电网建设与发展的需求。
当前电力巡检正朝着标准化、无人化和智能化发展,由于无人机不仅具有制造成本低、飞行费用低、任务展开迅速、可进行全程录像和拍照,而且在高山大岭或特高压输电线路等人工难以巡视的地方更能显出其优越性,因此被广泛应用于电力巡检之中[3]。为了进一步提高电力巡检水平,采用无人机来代替人工巡检,已经成为许多电力企业迫切研究的课题。
1 无人机巡检总体结构
本系统主要是由无人机、机载检测系统、地面控制系统三部分组成。
1.1 无人机
负责搭载检测设备,一般事先设定好其飞行路线并且可以在地面对其进行控制;机载检测系统安装在无人机上,地面控制系统可以安装在巡检汽车上,通过无线通信模块与机载检测系统进行通信,工作人员可以通过地面控制系统获取机载检测系统拍摄的输电线路视频图像,从而实现对输电线路的实时监控[4]。
1.2 系统硬件
电力线路巡检的智能化无人机硬件设计,包括嵌入式控制单元、红外摄像仪、无线通讯模块和GPS飞机姿态信息等。
1.3 巡检系统
机载巡检系统安装于无人机上,通过预先设计的拍摄方式,由可见光相机拍摄线路、绝缘子、杆塔、地基和输电走廊;红外成像仪和紫外成像仪分别拍摄可见光、红外和紫外视频图像等信息。
1.4 地面控制系统
地面控制系统主要有三部分组成,即无线通信模块、地面控制平台和视频监视器组成。
1.5 巡检系统软件
巡检系统软件包括机载检测系统程序和地面控制程序两个部分,两者间通过自定的交互协议,利用无线通信模块进行信息交互。该终端系统将JAva#作为开发语言,选用Visual Studio 2005作为集成开发平台[5]。在VS 2005中新建关于Win CE 5.0的智能设备应用程序,来进行的操作。
2 无人机清理装置
清理装置附属于无人机身上,主要清理线缆上面所附着的鸟粪、盐碱、粉尘等,在机架下方设置有机械抓手,机械抓手前方设置有喷水装置,尾部为可开合的套筒,套筒采用绝缘材料制成,其内设置有毛刷和伸缩杆,在伸缩杆的尾端铰接有两个相对的连接杆,其中一个连接杆尾端连接有左半套筒,另一个连接杆尾端连接有右半套筒[6]。如图3所示。
其中连接杆之间设置有弹簧,机架上方设置有液压缸,所述液压缸的缸筒固定在机架上,喷水装置包括设置在机架上的水箱和水泵,水泵入口与所述水箱连接,水泵出口连接有设置在机架下方的水管连接,水管前端设置有开口向下的喷头[7-8]。如图4所示。液压缸与所述水泵通过计算机控制。

图3 巡检清理装置的主剖视图
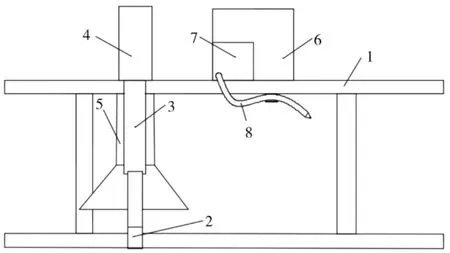
图4 巡检清理装置的左剖视图
3 功能实现
各项配置完成以后,可以登录软件界面,进行巡线的具体功能操作,可以完成巡线记录和无人机定位,必须以管理员身份进行登陆,才能保证提交的登录信息成功发送和接收,并将显示巡线系统软件登陆界面,如图5所示。

图5 线路巡检软件主界面
4 具体应用
本次研发的智能化无人机清理装置以及手持控制终端(1台),并在四川某电力公司进行了安装试验,试验场景如图6所示。
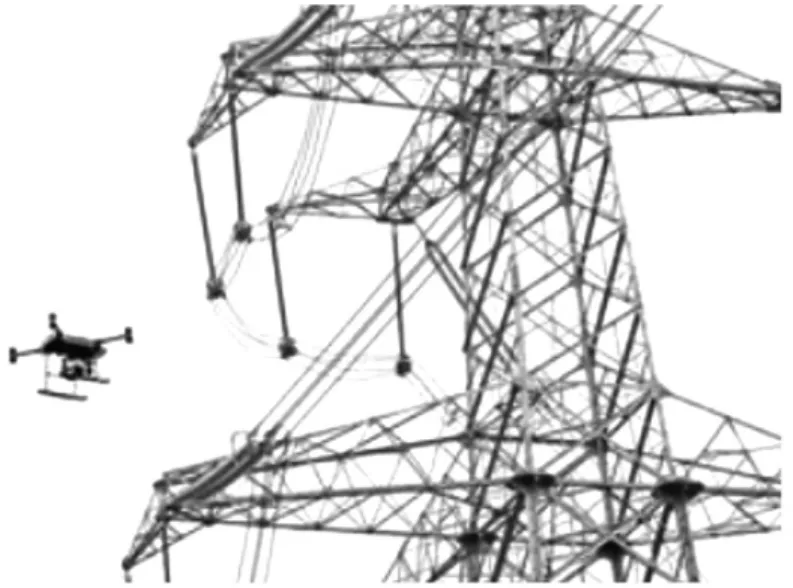
图6 实际试验场景
5 结束语
无人机应用于电力输电线路巡检,不受地形地貌限制,尤其适用于四川险峻山区、多河流地貌下的巡线工作。机载高清摄像设备可对输电线路产生的故障进行实时在线定位和监控,地面控制人员可根据地面站回传实况及时发现排除线路缺陷及重大隐患,杆塔巡查效率得以大大提高,节省了大量人力、物力,提高了巡检人员工作安全系数。采用无人机系统获得的收益不仅仅在实际层面上得到体现,也极大地提升了国网自动化电力系统的集成度,能有效促进相关项目的建设进度。
根据本项目研究成果在现场的试运行效果,并在四川部分地区开展测试进行推广,可以实现大规模的高压输电线路巡检工作,节约了人力成本的开支,减轻了巡检人员的劳动强度,减少了人工误操作发生的概率,提高了工作效率,对提高输电线路运行可靠性乃至电力系统运行可靠性都有一定的实际效益。
猜你喜欢
结构工程师(2022年2期)2022-07-15
冶金设备(2020年3期)2020-12-13
机电设备(2020年3期)2020-06-28
设备管理与维修(2020年2期)2020-03-24
广西电业(2020年11期)2020-03-23
家庭影院技术(2019年12期)2020-01-19
无人机(2018年1期)2018-07-05
制造技术与机床(2017年10期)2017-11-28
凿岩机械气动工具(2017年3期)2017-11-22
工业设计(2016年4期)2016-05-04
