电磁弹射用变极距直线感应电机设计研究
2018-10-25 07:52:50刘希军朱新宇刘小涵
微特电机 2018年11期
刘希军,朱新宇,刘小涵
(中国民用航空飞行学院,德阳 618300)
0 引 言
随着军事发展和综合实力的提高,航母用蒸汽式弹射器已经很难满足现代战机的弹射需求,必会被电磁弹射装置代替。电磁弹射器效率高,精度高,加速均匀,维护方便,世界各国竞相研究开发[1]。直线感应电机是整个电磁弹射系统驱动的来源,是最为重要的组成部分。直线感应电机结构通常为短次级长初级式,初级供电方式为分段供电的方式。为了减弱磁场齿谐波对直线电机的影响,初级铁心设计为无齿槽结构。次级设计采用非磁性材料,在保证产生足够推力情况下,减小次级质量,降低制造运行成本,提高可靠性[2-3]。
针对长初级双边直线感应电机,国内外已有不少相关研究,但同样存在一定的局限性。文献[4]在未考虑端部效应的情况下,建立双边直线感应电机数字仿真模型,仿真分析电机电压、电流、功率等动态性能。文献[5]研究了双边直线感应电机二维磁场分布,并对电磁推力进行分析,转差率0.2附近时,电磁推力输出最大。文献[6]以及文献[7]主要从电磁场理论角度出发,分析双边直线感应电机边端效应问题,推导电机等效电路模型及边端效应修正系数。以上涉及双边长初级直线感应电机的研究均是以恒极距为基础建模,改变初级绕组电流频率,对电机速度进行控制。然而在实际舰载机弹射过程中,时间短暂,电流频率快速变化控制较难以实现,控制精度也不够精确。
针对已有相关研究的局限性,本文以长初级双边直线感应电机T型等值电路为基础,推导电机极距与电磁推力输出关系表达式,仿真分析运动学参数与电机极距关系,并建立变极距直线电机有限元仿真模型,检验直线电机参数设计的正确性。电机极距变化示意图如图1所示。

图1电机极距变化示意图
1 电磁弹射等值电路分析
直线感应电机作为电磁弹射系统的驱动动力源,需提供足够的推力完成舰载机的弹射任务。整个弹射过程是一个不断加速的过程。舰载机加速轨道通常为100 m,舰载机和动子质量即弹射质量M约为25 t,舰载机的起飞速度约为100 m/s。假设弹射过程中,推力输出F保持不变,忽略各摩擦阻力作用[8],可得:
(1)

(2)
式中:vt,t,s分别为弹射末速度、弹射时间,以及轨道长度。可计算出在100 m的弹射轨道内,欲使舰载机达到100 m/s起飞速度,直线电机至少需提供1.25 MN电磁推力,弹射时间2 s。舰载机弹射后,电机动子需要在短距离内减速为零,通常需要在10 m内停止,因而动子的长度和质量设计需在合理范围内。
若采用直线电机电磁力制动,保证1.25 MN电磁力不变,则动子最大质量设计为2 500 kg,超过这个质量范围,则动子仅在电磁力作用下将无法在规定长度内制动,需通过其它外界装备辅助制动。
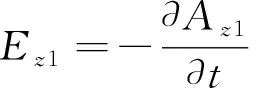
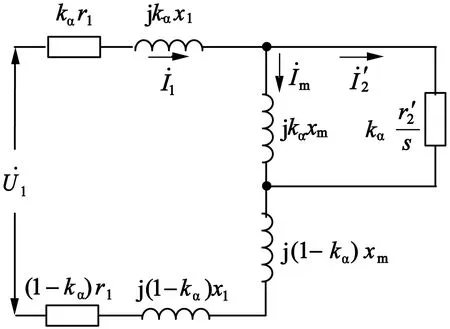
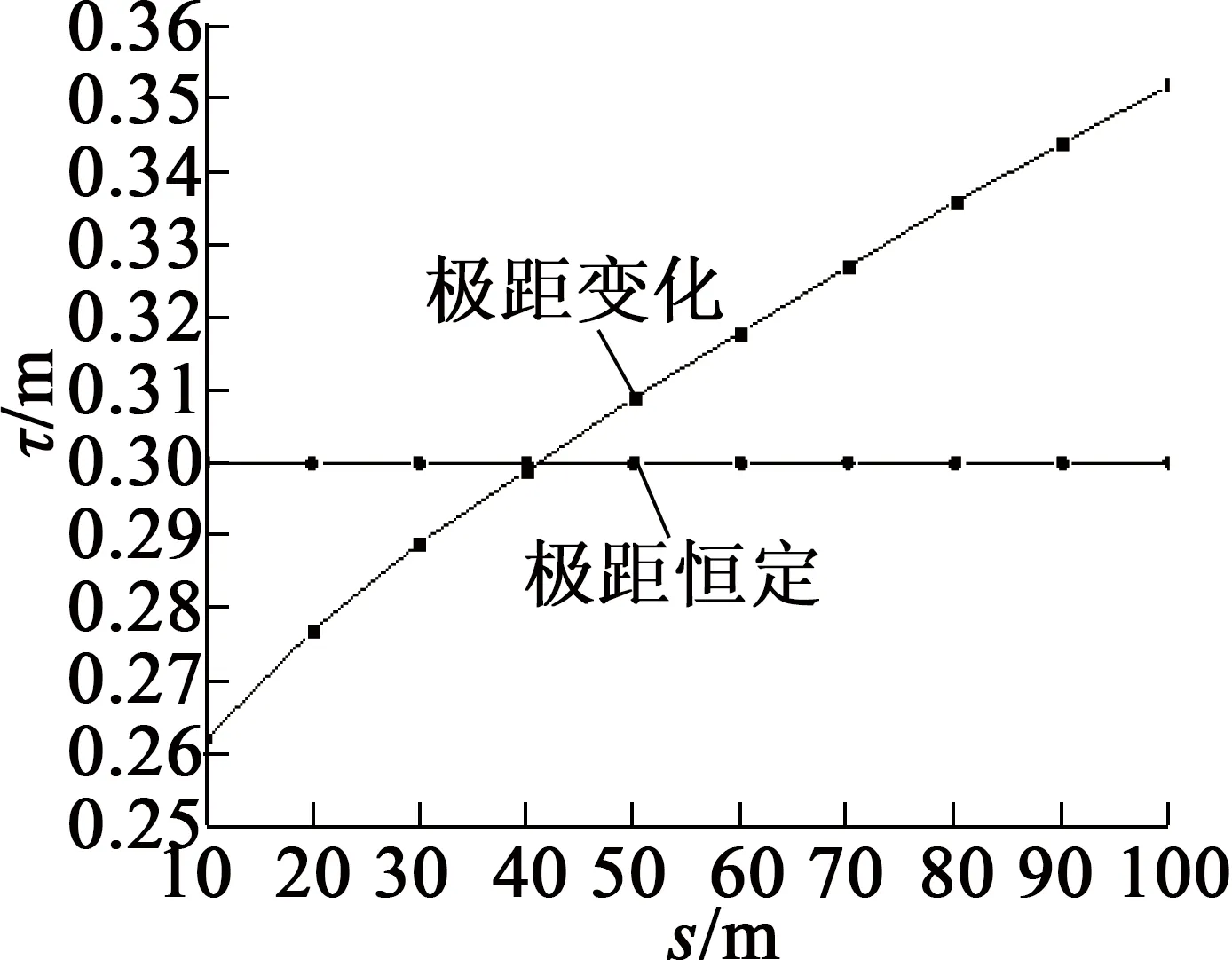
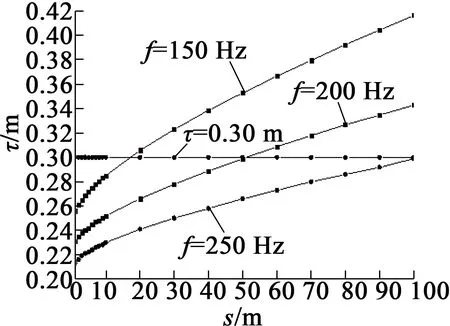
双边直线感应电机物理模型分析时,假设初级部分无限长[9],按照初级和次级的位置关系将直线电机划分为3个部分:Ⅰ(0 图2电机三段式分段模型图 通常采用麦克斯韦方程组分析双边直线感应电机一维场问题,并求解气隙磁场及直线电机的各种性能。以次级端部对应的位置为坐标原点,初级合成行波电流层电流密度: j1=J1ej(sωt-kx) (3) 式中:J1为行波幅值;s为转差率;ω为电流角频率;系数k=π/τ,τ直线电机的极距。 根据安培定则可得: (4) 式中:δe为电机有效电磁气隙;μ0为真空磁导率;By1为区域Ⅰ气隙磁通密度y轴方向的分量;j1初级线电流密度;j2次级的线电流密度。 引入矢量磁位A,由B=×A和可得: (5) (6) 式中:Ez1表示区域Ⅰ中电场强度z方向上的分量;Az1表示区域Ⅰ中矢量磁位z方向上的分量。 (7) 式中:σs为次级面电导率。可得: (8) 采用同样的方法可以求解区域Ⅱ、区域Ⅲ中的矢量磁位值。根据磁通密度在各个区域连续原理,可以求得方程系数值。 对双边直线感应电机分析时,若初级长度为lb,次级长度为la,初级覆盖次级部分定义为有效部分,未覆盖部分定义为无作用部分。双边直线感应电机T型等效电路如图3所示[10],为简化分析,忽略非磁性次级漏电抗及铁心损耗。 图3长初级双边直线感应电机等值电路 电机串联阻抗Z: (9) 直线电机电磁推力F可表示: (10) 式中:m1表示初级绕组的相数;I1表示初级相电流值;I2表示次级相对于初级的相电流值。 由于弹射用长初级双边直线感应电机初级相对于次级无限长,为简化分析,忽略纵向端部效应影响,可推导出次级折算到初级的电阻和励磁电抗表达式分别如下: (11) (12) 双边直线感应电机的设计需满足电磁弹射系统主要技术指标,即产生1.25 MN电磁推力,初步设计时忽略外部干扰及阻力影响。变极距双边直线感应电机设计中,电机极距是设计的关键,弹射过程中,极距既可以采用连续变化,亦可以采用分段变化。 较大的电机极距会使得初级绕组端部漏电抗和损耗增加,较小的电机极距会增加电机加工难度,电机极距通常为0.2~0.5 m。初级铁心的宽度通常为极距长度的1.5倍至3.5倍,既可减小重量和成本,亦可减小端部绕组长度。 次级导体板的设计可根据其受到的剪切应力计算,且次级横向每边伸出初级的长度不应小于τ/π。次级的厚度直接影响行波推力,减小次级厚度有利于减小励磁电流和抑制端部效应,通常为4~10 cm。 气隙长度是双边直线感应电机设计的重要参数。减小气隙长度,可增大行波推力大小,增大电机效率,但机械气隙的大小同样受到加工精度和装配精度的限制,通常大小为0.5~2 cm。 假设舰载机在加速过程中受到直线感应电机输出的电磁推力保持不变,且忽略牵引力和摩擦阻力对飞机弹射作用的影响,飞机处于加速度恒定状态。分析弹射过程变极距直线感应电机极距的变化对弹射系统的影响。 采用MATLAB依据运动学方程以及等值电路法推导的电磁推力方程,建立仿真模型,验证比较变极距双边直线感应电机与传统型双边直线感应电机在舰载机弹射方面的优越性,并验证电源频率、次级长度等因素对弹射的影响。 图4、图5分别分析了极距变化对次级相电阻和磁化电抗的影响。 图4极距变化对次级相电阻影响 图5极距变化对磁化电抗影响 直线感应电机推力输出保持不变,为1.25 MN时,极距固定和极距变化,不同位移不同速度所需电流频率、电机极距关系,分别如图6和图7所示。 图6弹射位移与电流频率关系 图7弹射位移与电机极距关系 直线电机极距保持恒定时,为0.30 m,整个飞机加速弹射的过程中,改变电流的频率来改变电机电磁推力输出值。整个弹射过程,随着速度的不断增大,电机电流频率不断增大。加速位移10 m位置处,电机电流频率为46.5 Hz;当飞机达到起飞所需速度100 m/s,即100 m的位移时,电机电流频率已经增加到260.5 Hz。加速过程转差率逐渐减小,滑差频率恒定不变。 采用变极距弹射时,控制电流频率200 Hz固定,在设计电机时采用不同位移处电机极距不同设计方案,完成舰载机弹射。保证电机推力输出1.25 MN恒定,加速位移10 m位置处,变极距直线电机极距值为0.262 m;当速度达到100 m/s时,变极距直线电机极距值为0.352 m。加速过程滑差频率和转差率均逐渐减小。 传统的直线感应电机通过改变电流频率改变电机电磁推力输出,但对于弹射过程而言,其弹射时间非常短暂,快速改变电流频率无疑会增大控制难度。变极距直线感应电机在整个弹射过程中,由于极距变化,电流频率恒定,控制方式简易,只需在加工电机时不同弹射位移对应不同的电机极距即可。 随着弹射速度、位移的不断增大,传统的直线感应电机供电频率不断增大,必定会受到逆变器开关频率的限值,且损耗较大。相较而言,变极距直线感应电机,频率恒定在适中值,电机损耗不会随着弹射加速而增大。 弹射频率的选取是变极距弹射的核心,图8为不同频率下,弹射位移与直线电机极距的关系。 图8不同频率下弹射位移与电机极距关系 选取了3种不同频率作对比,若选取低频时,如选择频率150 Hz,位移超过20 m之后,电机极距值均大于额定极距值0.300 m,且随着弹射速度的增加,极距值不断增大,必然无法在规定距离内完成飞机的加速任务。若选取的频率较高,如选取250 Hz,从加速开始至结束,电机的极距值均小于额定的极距0.300 m,能在指定距离内完成弹射任务,但电流高频率的选取,会增加电机损耗,也会受到逆变器频率限值。故选取较为适中的200 Hz为电机电流频率。 定子采用叠装铁心双层绕组,动子采用滑片型结构,减小弹射质量,亦可以便于弹射后制动。表1为变极距长初级双边直线感应电动机部分设计参数值。 表1 电机部分设计数据 采用ANSYS有限元方法建立变极距直线感应电机模型,对直线感应电机的电磁推力输出及其影响因素进行仿真分析。 图9不同极距下滑差率与电磁推力关系 图9为30 m/s时,变极距直线感应电机极距分别为0.26 m,0.28 m以及0.30 m时,滑差率和电机推力值的关系。虚线表示采用ANSYS的仿真值,实线表示采用理论计算的结果。从对比结果来看,两者几乎相同,在最大值处略有偏差,误差存在的原因是在进行理论分析时,等效电导率为零,磁导率无穷大所致[11]。理论模型得到了有效的验证。 利用ANSYS建立变极距直线感应电机有限元仿真模型,验证理论计算模型的有效性。研究结果表明,采用恒极距0.30 m弹射,改变电流频率控制电磁推力,10 m位移处,电流频率146.5 Hz,100 m起飞位移处,电流频率增加到260.5 Hz,弹射过程电流频率不断增加;采用变极距弹射,控制电流频率200 Hz固定,10 m位移处,极距值0.262 m,100 m起飞位移处,极距值0.352 m,弹射过程电流频率不变,即降低了控制系统难度,亦减小高速运行电机损耗。采用变极距直线感应电机作为弹射的动力驱动,为弹射器的设计与研发提供了一种新的想法和思路,具有较强的研究意义和应用价值。



2 电磁弹射运动学仿真分析




3 电机结构参数及模型仿真


4 结 语
猜你喜欢
中国锰业(2021年2期)2021-05-12 10:25:34
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
中国资源综合利用(2017年4期)2018-01-22 02:46:40
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:57
焊接(2015年5期)2015-07-18 11:03:41
企业技术开发·下旬刊(2015年1期)2015-05-30 04:20:21
机电工程技术(2015年11期)2015-03-12 02:06:17
天津冶金(2014年4期)2014-02-28 16:52:46
河南科技(2014年16期)2014-02-27 14:13:21