表贴式永磁电机齿槽转矩解析法比较研究
2018-10-25 07:52:44倪有源
微特电机 2018年11期
倪有源,王 磊
(1.合肥工业大学,合肥 230009;2.安徽大学高节能电机及控制技术国家地方联合工程实验室,合肥 230601)
0 引 言
永磁电机相比于传统的电励磁电机具有结构简单、质量轻及效率高等优势[1],从而广泛运用在各种领域中。但是在一些特殊的领域中,要求转矩脉动低。而转矩脉动是永磁电机内在的缺陷,会产生振动和噪声。转矩脉动主要来源于齿槽转矩,齿槽转矩是由永磁体与电枢槽相互作用而产生的[2]。
研究齿槽转矩具有重要的意义。国内外学者展开了广泛的研究,也提出了许多减小齿槽转矩的方法,如采用槽数与极数的配合[3-4],通过定子加辅助槽[5-6],选取合适的极弧系数[6-7],改变永磁体的形状[8-9]以及利用转子偏心的办法[6,9]等。
齿槽转矩的计算方法通常分为两类:有限元法和解析法。对齿槽转矩的研究大多采用的是有限元法,虽然计算结果精度高,但是需要大量的计算时间,而且不适合进行优化分析。解析法是一种快速得到齿槽转矩的有效方法,并且从设计方面能直接得出影响齿槽转矩的因素。解析法主要包括能量法[5,10-12]和麦克斯韦应力张量法[13-16]。
本文分析了计算齿槽转矩的4种模型。其中模型A是利用理想化的气隙磁密计算齿槽转矩的简化模型。模型B是通过先求解拉普拉斯方程和准泊松方程,获得气隙磁密解析式,然后计算齿槽转矩。模型C是先利用保角变换获得不同位置处精确的相对磁导,再计算齿槽转矩,与利用能量法的其它模型相比,该模型得到的齿槽转矩更接近于实际结果。模型D是运用麦克斯韦应力张量法计算齿槽转矩。
1 解析模型分析
表贴式永磁电机的分析模型如图1所示。图1中Rs为定子内半径,Rr为永磁内半径,Rm为永磁体外半径。本文分析齿槽转矩的4种解析模型,是基于如下考虑:假设铁心的磁导率为无穷大;θ=0为永磁的中心位置处;永磁材料的磁导率与空气相同,即μr=1;槽形为直角槽,且假设槽无限深。

图1 永磁电机的结构
1.1 模型A
模型A是利用能量法计算齿槽转矩。根据定义可知[2],齿槽转矩是由于转子转动时电机中能量的变化而产生,且一般铁心中能量的变化是可忽略的[13]。如果不考虑永磁的能量变化,齿槽转矩波形的基本特性也不会改变。依据文献[10],可得齿槽转矩:
(1)
式中:α为转子转动的位置角度;W表示永磁电机的气隙中储存的能量;θ表示沿电机旋转方向变化的角度;B(θ)为无槽电机的气隙磁密;G(θ,α) 为气隙的相对磁导函数。

图2 理想的气隙磁密分布
(2)

令β=0为一个槽中心的位置。假设磁密通过槽的路径如图3所示。磁密在槽中的路径为四分之一圆,得到一个槽距下有效气隙长度:

图3 磁密在槽中的理想路径
(3)
式中:g为气隙长度;θ1为槽距角;θ0为槽口角。且θ0和θ1都用弧度。
(4)
再对其进行傅里叶分解,得:
(5)
式中:Ns表示电机定子槽数。
考虑到槽与永磁的相对位置,得β=θ+α。于是得到:
(6)
(7)
将式(5)和式(2)代入式(1),再利用三角函数的正交性,即式(8),可得式(9)。
当n≠m时,有:
(8)
(9)
式中:Lef为电机的轴向长度;NL表示槽数与极数的最小公倍数。
模型A运用的是能量法。由于对气隙磁密进行了简化,没有考虑极间漏磁。且磁密在槽中的路径也是理想化,没有考虑槽漏磁,因此得到的结果与实际误差较大。
1.2 模型B
在模型A中,气隙磁密的波形是理想化的。实际上,精确的气隙磁密解析式可以通过求解拉普拉斯方程和准泊松方程得到[17]。当定子为无槽结构时,在气隙区域Ⅰ和永磁区域Ⅱ中,磁感应强度与磁场强度分别满足:
(10)
式中:BrⅠ,HrⅠ分别为空气中的磁通密度和磁场强度;BrⅡ,HrⅡ分别是永磁中的磁通密度和磁场强度;M为永磁体的磁化强度。
在二维极坐标下,磁化强度矢量可表示:
M=Mrr+Mθθ
(11)
式中:Mr和Mθ分别为永磁体磁化强度的径向方向和切向方向的分量。
由于旋转永磁电机的永磁体一般是径向充磁的,一对磁极下的磁化强度分布可以写成分段函数:
(12)
对Mr和Mθ分别进行傅里叶分解,得到:
(13)
根据电磁场理论,对于标量磁位φ,有:
(14)
对于图1中的气隙区域Ⅰ和永磁区域Ⅱ,标量磁位分别满足拉普拉斯方程和准泊松方程,得到:
(15)
(16)
再根据磁场的边界条件,可得:
(17)
于是,气隙区域Ⅰ磁密的径向分量和切向分量分别:
(18)
式中:
令r=Rs,代入式(18)中的BrⅠ(r,θ),得到式(1)中的B(θ),对其平方,并计算傅里叶级数,得到:
(19)
将式(19)和式(6)代入式(9),得到该模型下的齿槽转矩。与模型A相比,模型B也是运用了能量法。但由于模型B考虑了永磁的极间漏磁,得到的气隙磁密更接近实际情况,从而得到的齿槽转矩更接近实际结果。但是磁密在槽中的路径也为理想情况,因此得到的结果与实际情况还是存在一定的误差。
1.3 模型C
在计算气隙磁导时,模型A和模型B都认为磁密通过槽中的路径如图3所示。这是为了计算方便,对路径进行理想化,但与实际存在误差。因此模型C运用保角变换的方法得到精确的相对磁导函数。
对于图1的有槽结构永磁电机,相对磁导函数由文献[18]可以得出:
(20)

(21)
并且:
(22)
由电磁原理,得相对磁导函数:
(23)
将相对磁导函数写成傅里叶级数的形式,即:
(24)
然后令r=Rs并代入式(23),求得相对磁导。对式(24)的两边平方,再对其展开傅里叶级数,得:
(25)
将式(19)和式(25)代入式(9),于是可计算齿槽转矩,该模型也是运用能量法计算齿槽转矩。与模型A和模型B相比,模型C运用了保角变换计算相对磁导,而不是假设磁密通过槽的路径为四分之一圆,于是得到相对磁导更加精确,从而获得的齿槽转矩更接近实际情况。
1.4 模型D
除了采用能量法以外,还可以采用麦克斯韦应力张量法计算。运用麦克斯韦应力张量法计算齿槽转矩的基本条件,是已知气隙磁密的径向分量和切向分量。式(18)已给出了表贴式无槽永磁电机的气隙磁密,而有槽电机的相对气隙磁导在式(24)中给出,这里就不再赘述。
依据文献[19],有槽电机的气隙磁密可以写成:
Bs(θ,α,r)=G(θ,r)Bmag(θ,α,r)
(26)
式中:Bmag(θ,α,r)为无槽电机的气隙磁密,包括径向分量和切向分量。
根据麦克斯韦应力张量法和文献[13],齿槽转矩表达式:
(27)
式中:Bsr(r,θ)和Bsθ(r,θ)分别为气隙磁密的径向分量和切向分量。
为了便于计算,可将式(18)写成:
(28)
将式(27)和式(22)代入式(25)中,可得:
(29)

(30)
把式(29)和式(30)代入式(27),可得:

cos(mNsθ)cos(hNsθ)dθ}
(31)
对于式(31),利用三角函数的正交性,可得:
①如果kp+np-mNs=0,则:
sin[p(k+n)α]
(32)
②如果kp-np+mNs=0或kp-np-mNs=0,则:
sin [p(k-n)α]
(33)
③如果kp+np+mNs-hNs=0或kp+np-mNs+hNs=0或kp+np-mNs-hNs=0,则有:
Brn(r)Bθksin[(k+n)pα]
(34)
④如果kp-np+mNs+hNs=0或kp-np+mNs-hNs=0或kp-np-mNs+hNs=0或kp-np-mNs-hNs=0,则有:
Brn(r)Bθksin [(k-n)pα]
(35)
在式(32)至式(35)中的r,可以为气隙中任意半径处,但如果选择的半径太接近定子内径表面时,则计算时会出现问题。因为在这个位置处,利用保角变换计算气隙的相对磁导时,根据文献[16],可以得到气隙的相对磁导为无穷大。为了避免造成相对磁导无穷大的问题,半径取为气隙的中间位置。
2 解析法计算结果及有限元法验证
一台3相、4极24槽表贴式永磁电机的主要参数如表1所示。永磁磁化方向为径向。利用上述建立的各种解析模型,对齿槽转矩进行分析计算。
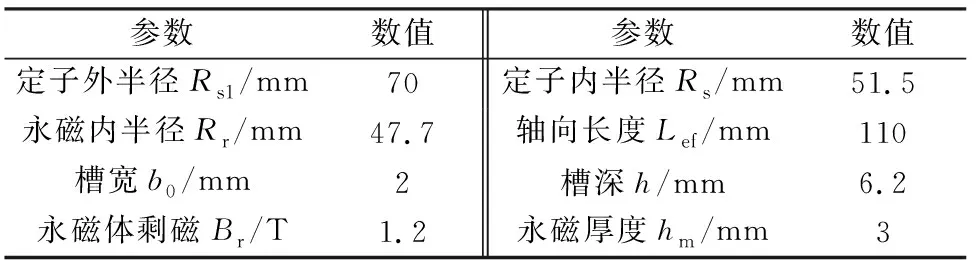
表1 永磁电机的主要参数
当电机的极弧系数αp分别取0.7和0.9时,图4给出了利用前述的4种模型以及有限元法分别计算得到的齿槽转矩波形。从图4中可以得到,解析模型A和解析模型B计算获得的齿槽转矩波形与有限元法得到的结果误差较大。模型C和模型D由于考虑了极间漏磁和槽漏磁,得到的齿槽转矩波形更接近有限元法的计算结果。
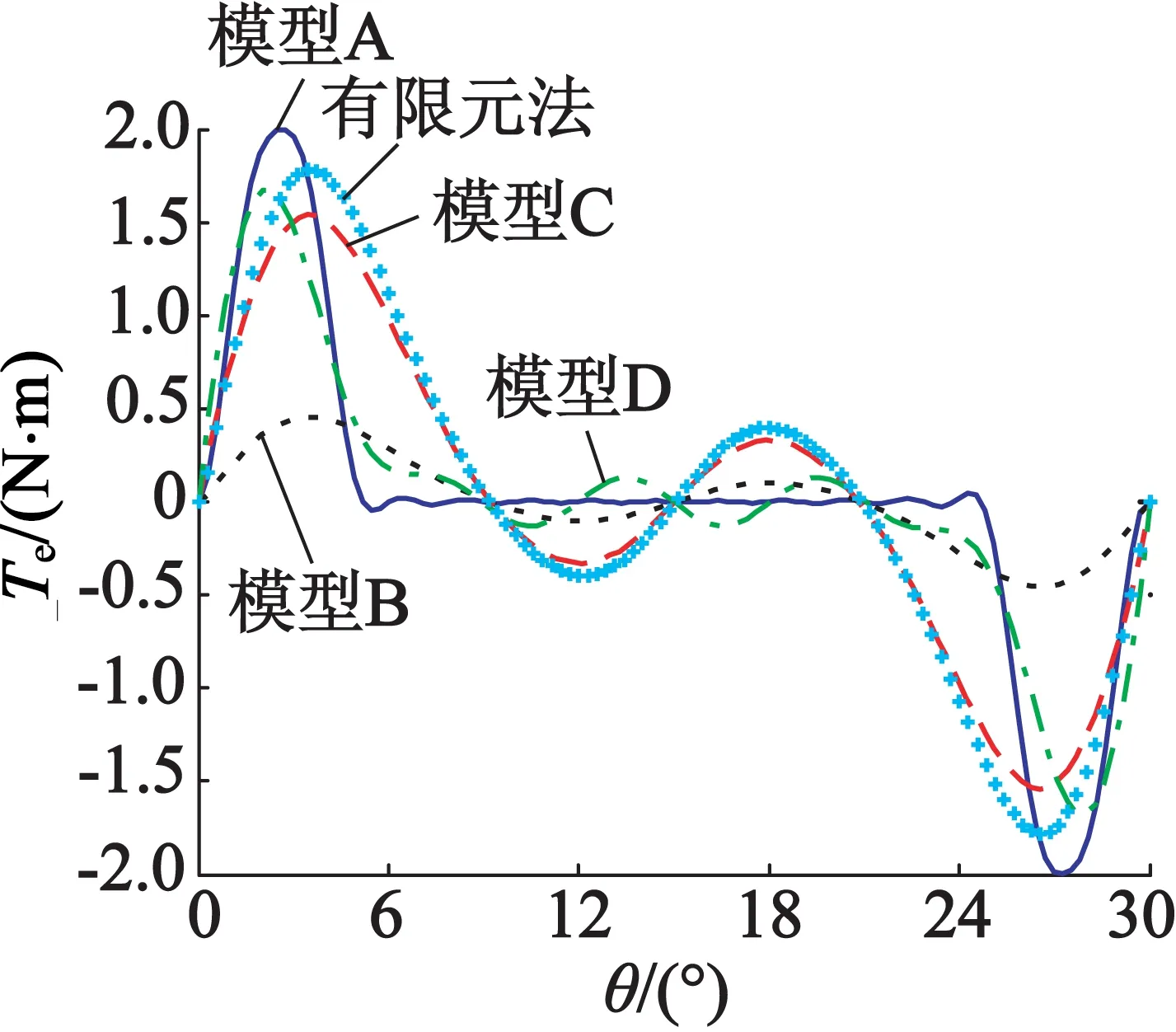
(a) αp=0.7
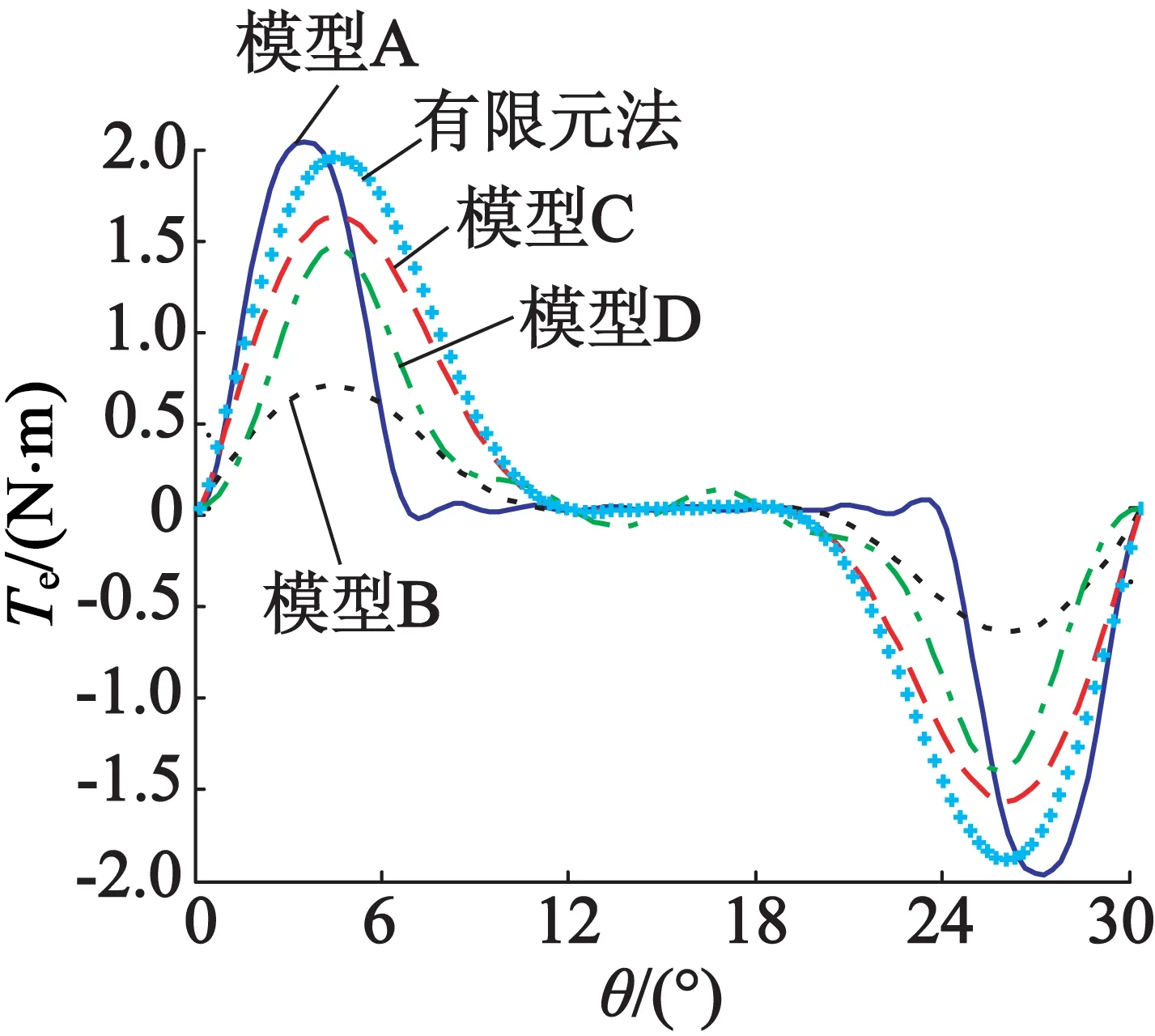
(b) αp=0.9
在上述模型中,用能量法的模型,在计算气隙磁密或相对磁导时,取的位置是在定子的内表面。而利用麦克斯韦应力张量法的模型,在计算电机的气隙磁密时,半径取在气隙的中间处。实际上,在气隙的不同位置处,得到电机的气隙磁密波形显然不同,但是得到的齿槽转矩并没有区别。为此,取气隙中的不同位置,即r分别为Rs-0.1g和Rs-0.9g,得到电机的径向气隙磁密波形如图5所示。
再取气隙中的不同位置,即r分别为Rs-0.1g,Rs-0.5g以及Rs-0.9g,得到电机的齿槽转矩波形如图6所示。从图6中可以看出,3个波形完全一致。因此,验证了齿槽转矩与位置无关的正确性。

(a) r=Rs-0.1g

(b) r=Rs-0.9g

图6 在气隙中不同位置处的齿槽转矩波形
3 结 语
本文比较分析了解析法计算表贴式永磁电机的齿槽转矩的4种模型。分别是利用能量法的模型A、模型B和模型C以及利用麦克斯韦应力张量法的模型D。这4种模型都能计算表贴式永磁电机的齿槽转矩。由于这些模型中考虑的因素不同,造成了齿槽转矩的计算结果不同。与有限元法相比可知,模型C和模型D比模型A和模型B得到的齿槽转矩结果更精确。相比于其它模型,模型D虽然计算量很大,但是精度较高。
猜你喜欢
防爆电机(2022年2期)2022-04-26 13:57:04
上海大中型电机(2021年1期)2021-06-09 09:12:04
时代汽车(2021年6期)2021-04-09 05:50:35
微特电机(2021年3期)2021-04-06 12:04:10
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
北京航空航天大学学报(2017年3期)2017-11-23 05:14:48
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:29
城市轨道交通研究(2015年5期)2015-02-27 11:02:05
电机与控制应用(2014年8期)2014-08-08 11:42:58