
无人水下航行器摆式发电装置设计与研究
2018-10-22 07:46方子帆葛旭甫何孔德马增武
中国机械工程 2018年19期
方子帆 葛旭甫 何孔德 马增武 方 婧
1.三峡大学水电机械设备设计与维护湖北省重点实验室,宜昌,443002
2.三峡大学新能源微电网湖北省协同创新中心,宜昌,443002
3.三峡大学机械与动力学院,宜昌,443002
0 引言
无人水下航行器(unmanned underwater vehicle,UUV)是一种能够自主航行到指定区域进行水下观测、数据采集、遥控作战等任务的小型智能装备。目前UUV使用蓄电池动力,需要定期进行充电或更换电池组,不能满足长航时、远航程的工作需求[1],因此,开发UUV持续能量供给系统,提高UUV的续航能力,是一项极其重要的研究工作。
海洋能是一种蕴藏在海洋中的可再生清洁能源,主要包括潮汐能、潮流能、海流能、波浪能和盐差能[2-3]。UUV探测作业时锚系于海底,受波浪、海流、潮汐等海洋动能的影响,处于摆动状态。目前,开发利用海洋动能为海洋装备提供能源供给技术已成为热点,国内外科研机构相继开展了这方面的研究工作。MITCHESON等[4]研究了应用于水面航行器的摆式惯性波能收集装置;日本三菱重工研制的AUV-EX1型UUV,可进行深海科学探测[5];美国海军主持设计的“飞行”1型UUV于2007年装备部队[6]。王延辉等[7]研究了基于温差能的水下滑翔器;宋保维等[8]设计了一套基于波浪能的海洋浮标发电系统;丁文俊等[9-10]针对浅水域探测型无人航行器能源供给问题,设计了一种波浪能发电系统;方子帆等[11]研制了一套多节漂浮型机械式波浪能发电装置,在理论上进行了有益探索。
在前期研究的基础上,针对海洋UUV能源供给需求,本文设计了一款小型摆式发电装置。该装置搭载在UUV内部,受波浪、海流、潮汐等影响,航行器产生摆动,飞轮获取动能,通过二级行星齿轮增速机构传动,将不连续的定轴摆动变为圆周运动并传递给永磁发电机,经整流、滤波、稳压等环节处理后转换成稳定的电能。
1 摆式发电装置功能创成
1.1 能量获取原理及其系统
海洋动能的转换利用机构一般分为三级能量转换机构:第一级为波浪能俘获机构,主要是将海浪中动能或势能转化为获能机构的动能或某种介质的压力能等初级不稳定机械能;第二级为能量转换与传递机构,起中间纽带作用,将第一级机构中的不稳定机械能转换为稳定的机械能;第三级为发电机构,将第二级机构中稳定的机械能转换为电能,实现波浪能-机械能-电能的转换,其能量转换原理见图1。
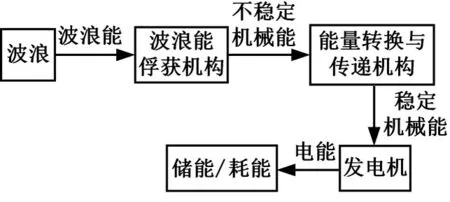
图1 能量转换工作原理Fig.1 Principle schematic of energy conversion
基于海洋动能利用原理与技术研究,设计一款摆式发电装置,由获能飞轮、行星齿轮增速器、安全离合器、永磁同步发电机、整流模块、工作负载模块、逆变器、充电蓄能模块等部分组成,其系统设计方案见图2。
该装置安装在水下航行器内部,安装示意图见图3。考虑工作空间限制,采用飞轮作为波浪能俘获机构,其左飞轮和右飞轮通过螺栓连接,左飞轮端面开有键槽,通过键槽连接行星齿轮增速器的输入轴;右飞轮开有圆孔,通过轴套固定在增速器的输出轴上。能量转换与传递机构采用两级行星齿轮增速器,低速级行星架连接输入轴,高速级行星架连接低速级的太阳轮。发电机构由旋转发电机和内置整流滤波稳压电路板组成,其内部结构见图4。
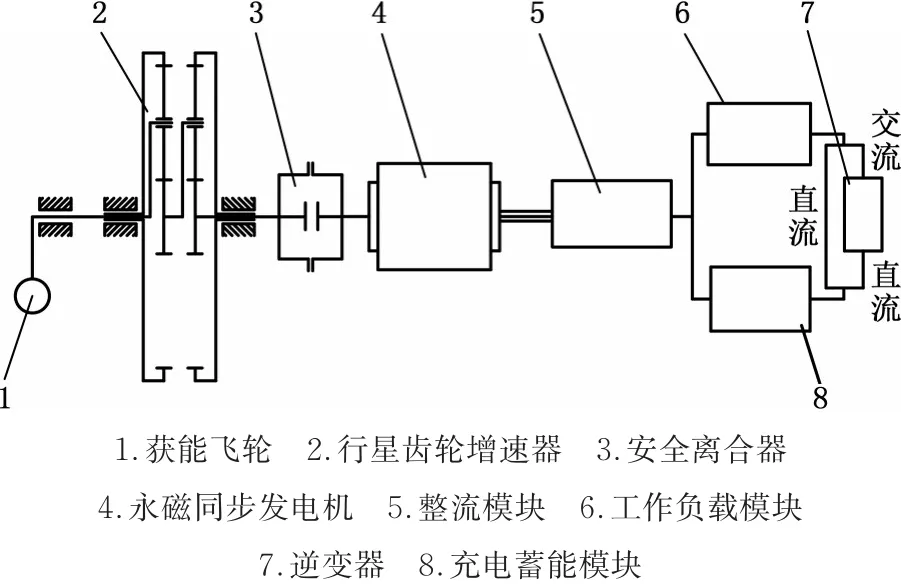
图2 摆式发电装置系统设计方案Fig.2 Schematic design of the pendulum power generation device
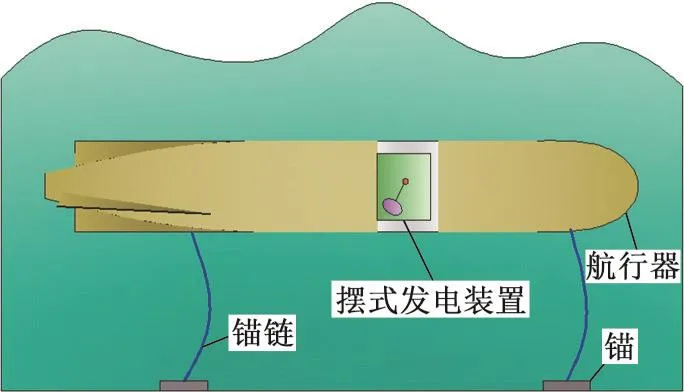
图3 摆式发电装置安装及航行器系泊图Fig.3 Installation of pendulum power generation device and mooring diagram of aircraft
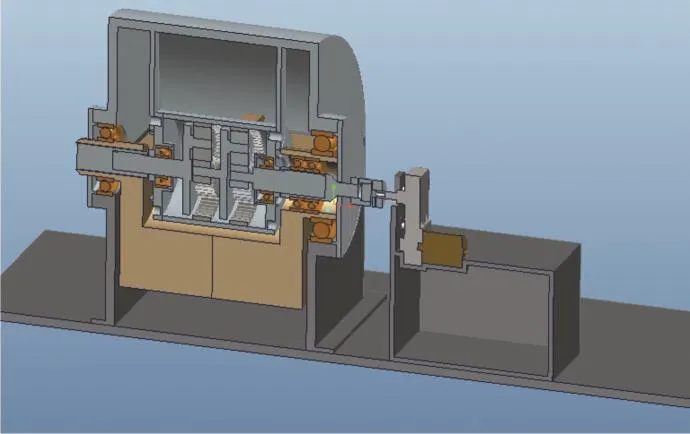
图4 摆式发电装置内部结构Fig.4 Internal structure of pendulum power generation device
摆式发电装置工作原理如下:无人水下航行器在海洋中受波浪作用产生横摇、纵摇、垂荡等运动,破坏了飞轮的动态平衡,使其发生一定角度的摆动,从而捕获波浪的动能和势能;飞轮的运动通过行星齿轮增速器实现增速,不连续的定轴摆动变为圆周运动,再经安全联轴器传递给永磁发电机,发电机转子高速旋转切割磁感线产生不稳定的交流电能。为满足工作负载模块供电和电池蓄能模块充电,实现海洋中水下无人观测设备长期工作能量供给,需要进行整流、滤波、稳压等环节处理,以获得稳定的电能。
1.2 整流滤波稳压电路
为实现电能的稳定输出,设计了小功率整流滤波稳压电路,其工作原理见图5。
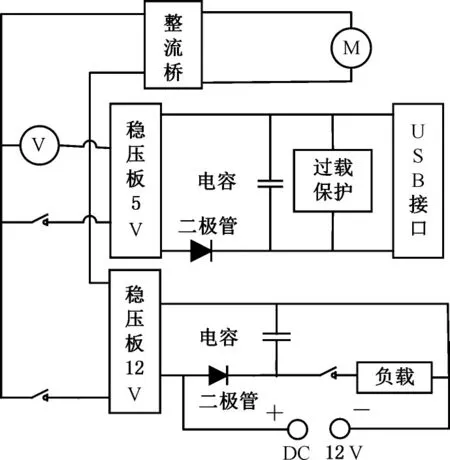
图5 电路系统工作原理Fig.5 Principle schematic of circuit system
电路工作过程:发电机输出不稳定的交流电,经整流电路转换为具有直流电成分的脉动直流电,再经稳压电路中电容进行电路纹波减小处理,过滤掉直流电中的交流成分。同时进行直流输出电压的自动调整,实现直流输出电压的稳定,再通过电阻和稳压管将直流电压连接到外部负载。内部可调电阻有分压限流作用,其电阻阻值根据外部负载的需要进行相应调整。电路设置了两种工况:一种工况是通过USB接口给监测设备的蓄电池充电,同时设有过充过载保护环节;另一种工况是直接给UUV外部电子设备供电。
基于Altium Design软件PCB面板设计了摆式发电装置实验电路图(图6)。图6中,4个具有单向导电性能的二极管组成整流桥,通过整流桥交流电转化成直流电,经电容(C)过滤掉整流输出电压中的纹波,电阻(R23)和稳压管(D27)将直流电压连接到外部负载,进行直流输出电压的自动调整,实现直流输出电压的稳定。22个发光二极管和电阻组成工作负载,每个发光二极管都串联1个电阻,电阻起限流保护作用,控制二极管发光亮度,防止电压过高时二极管被烧坏。
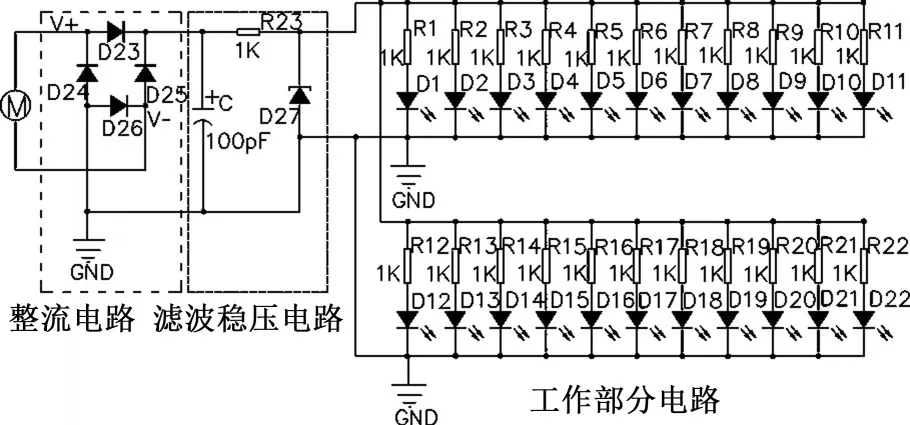
图6 摆式发电装置实验电路Fig.6 Experimental circuit of pendulum power generation device
2 摆式发电装置仿真研究
2.1 仿真系统
根据摆式发电装置的系统组成及参数,在PRO/E中建立发电装置三维模型,将模型导入ADAMS中,在运动部件之间施加约束关系和驱动方式,建立摆式发电装置机械动力学模型。利用ADAMS/Machinery Motor模块,输入发电机的关键参数,建立发电机模型。由机电系统数据交互,搭建摆式发电装置机电耦合动力学仿真平台,其仿真原理见图7。
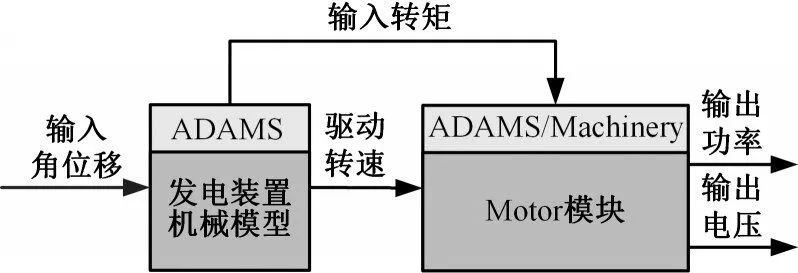
图7 摆式发电装置机电耦合动力学仿真原理Fig.7 Schematic of electromechanical coupled dynamic simulation of pendulum power generation device
为比较真实地模拟发电机的驱动效果,分析发电机输出电压和输出功率的变化,在ADAMS/Machinery Motor模块参数设置界面中输入发电机的结构参数,见表1。

表1 永磁直流发电机结构参数Tab.1 Structural parameters of permanentmagnet DC generator
最后,在ADAMS环境下搭建摆式发电装置虚拟样机,见图8。

图8 摆式发电装置虚拟样机Fig.8 Virtual prototype for pendulum power generation device in ADAMS
2.2 摆动角度对发电性能影响
摆式发电装置的发电性能与许多因素有关,如不同级海况下波浪参数、摆的质量、摆长、摆动角度、增速器的增速比以及发电机相关参数等,这些参数的改变都会影响发电机的发电功率和输出电压。本文着重研究摆动角度对发电性能的影响。参考我国某沿海地区波浪浮标的观测值,假设波浪周期为 3s,输入摆角分别为 15°、20°、25°、30°条件下,利用仿真平台进行分析,提取发电机的负载转矩曲线、功率曲线、电压曲线、转子转速曲线。当输入摆角为30°时,发电机输出电压曲线和输出功率曲线分别见图9和图10。
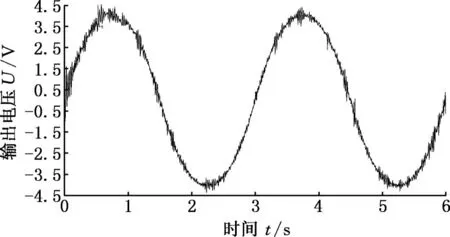
图9 输入摆角30°时发电机输出电压Fig.9 Voltage output of generator when input angle is 30°
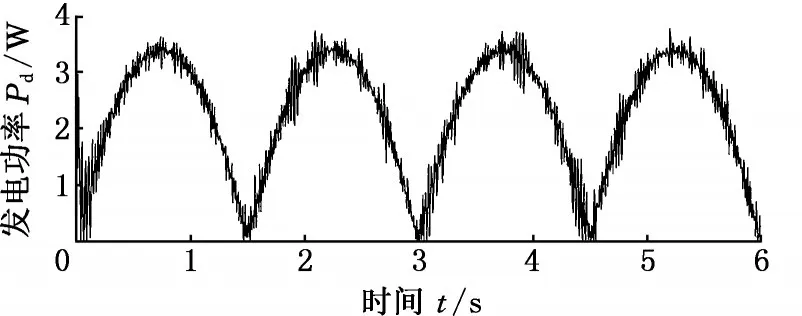
图10 输入摆角30°时发电机输出功率Fig.10 Power output of generator when input angle is 30°
通过给定不同输入摆动角度,发电机的输出功率和发电效率的仿真结果见表2。由表2可知,在给定海况波浪条件下,飞轮输入摆角为30°时,输出功率为2.51 W,发电效率为24.70%。
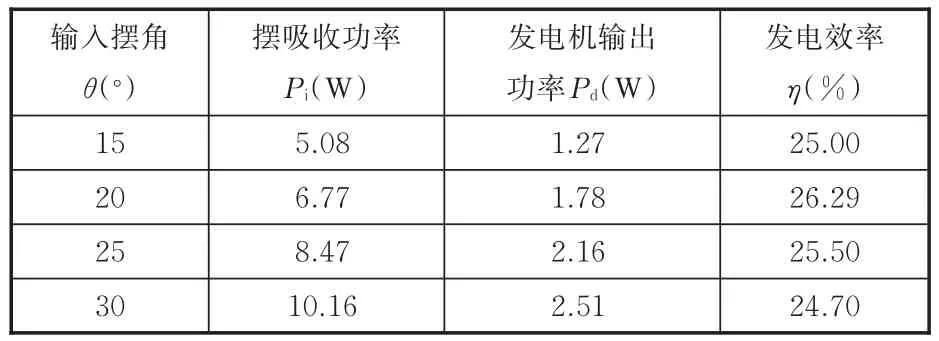
表2 不同摆角条件下发电机的输出功率及效率Tab.2 Output power and efficiency of generatorunder different swing angles
3 摆式发电装置试验研究
3.1 试验样机
摆式发电装置试验样机平台由摆式发电装置机械结构和测试电路两部分组成,见图11。
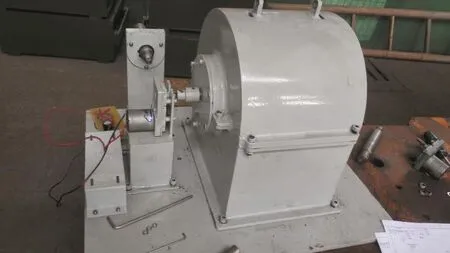
图11 摆式发电装置试验样机Fig.11 Test prototype of pendulum power generation device
发电机外接有测试电路板,并联的发光二极管和电阻焊接在电路板上,试验时将飞轮调整至一定角度,自由释放,发电装置产生电能,二极管发光,测试电路板结构见图12。
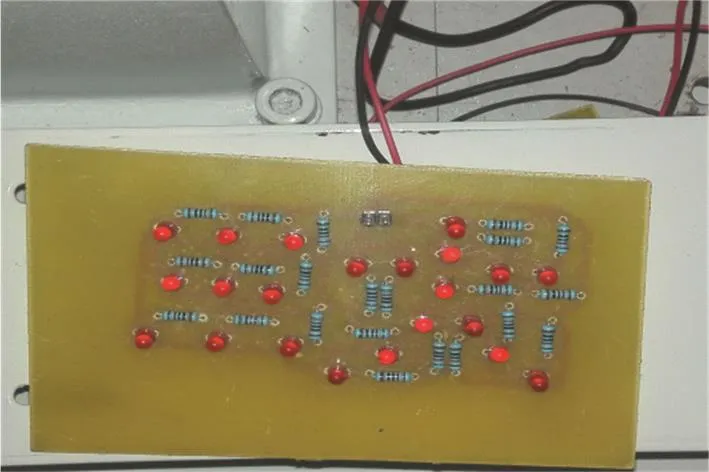
图12 摆式发电装置样机测试电路板Fig.12 Prototype test circuit board for pendulum power generation device
由样机试验可知,通过整流滤波稳压电路,随机交流电转换为稳态直流电,发光二极管正常发光,实现了电能稳定输出。
3.2 试验数据
由于波浪发电试验的复杂性,同时受水槽实验条件的限制,因此在实验室中采用模拟摆动实验的方法,利用图11中的试验平台进行试验。将飞轮输入摆角分别调整至15°、20°、25°、30°后自由释放,并进行试验测量分析,发电机输出电压测量结果见图13。
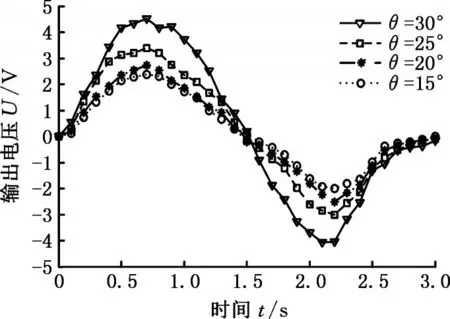
图13 不同摆角下发电机输出电压Fig.13 The output voltage curve of the generator under different swing angles
将仿真电压幅值和试验测量电压幅值进行比较分析,对比曲线见图14,分析数据见表3。结果表明:在给定海况波浪条件下,飞轮输入摆角越大,输出电压幅值越大,且两者结果偏差小。
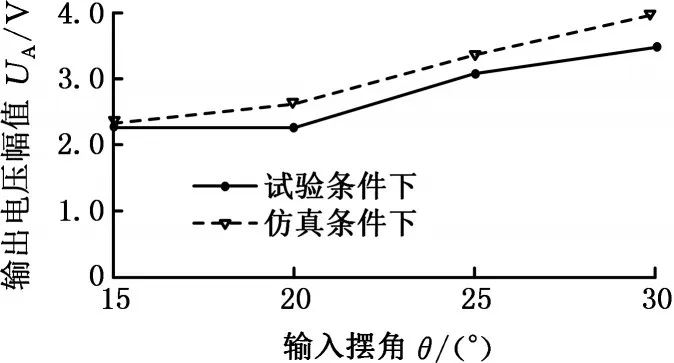
图14 试验和仿真条件下输出电压幅值对比Fig.14 Voltage output amplitude comparison under test and simulation conditions
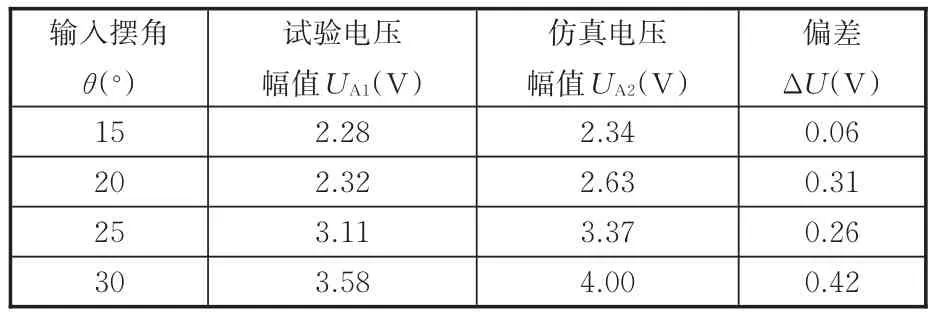
表3 试验条件下和仿真条件下输出电压幅值Tab.3 Data of output voltage amplitude under test and simulation conditions
3.3 发电效率计算
当输入摆角为30°时,发光二极管两端平均电压U=1.7 V,平均电流I=0.009 A,电路板共外接22只二极管,1只二极管串联1个阻值R=1 000 Ω电阻,则电路板负载功率为

发电装置的发电功率Pd由电路板负载功率P0和整流滤波稳压电子元件消耗功率Pc构成。试验样机的整流稳压滤波电路中电子元件消耗的平均功率总和Pc=0.36 W,计算出发电功率

当飞轮输入摆角为30°时,飞轮的摆吸收功率Pi=10.16 W,计算出发电效率

将仿真和试验测量的发电功率进行对比,见图15。试验发电功率和效率的数据见表4。从对比分析看,发电功率变化趋势一致,且随着输入摆角的增大,发电机输出功率有一定幅度的增大。

图15 试验条件下和仿真条件下发电功率Fig.15 Comparison of power generation between test and simulation

表4 试验发电功率及效率Tab.4 Power and efficiency of test power generation
4 结论
(1)基于波浪能利用基本原理,提出了一种搭载在无人水下航行器内部的摆式发电装置的设计方案,该摆式发电装置不与海水直接接触,避免了海水腐蚀,延长了装置寿命。
(2)基于虚拟样机技术,在ADAMS环境中建立发电装置机电耦合系统仿真模型,进行了仿真分析,提取了发电机输出性能参数。
(3)研制了摆式发电装置试验样机,搭建了试验平台,进行了不同摆角条件下的发电性能试验,并与仿真结果进行了对比分析。
(4)研究表明,研制的摆式发电装置可以实现稳定电能输出,采用的分析模型正确,方案得到了仿真与试验验证。研究成果为海洋动能发电系统的研制提供了一定的参考。
猜你喜欢
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
时代汽车(2018年12期)2018-06-18
电子制作(2016年19期)2016-08-24
电子制作(2016年21期)2016-05-17
中学科技(2015年10期)2016-01-06
探测与控制学报(2015年4期)2015-12-15
安徽化工(2015年4期)2015-12-12
中国科技信息(2015年24期)2015-11-07
空间控制技术与应用(2015年4期)2015-06-05
