
九开关变换器驱动六相电机的载波调制PWM控制
2018-10-12 05:08:56李永恒
海军航空大学学报 2018年4期
胡 光,李永恒,盛 号,孙 旭
(1.海军航空大学,山东烟台264001;2.陆军炮兵防空兵学院,合肥230031)
双Y移30°永磁同步电机具有低压大功率输出、可靠性高、转矩脉动小等优点,在全电舰船[1]、电动汽车[2]等方面应用越来越广泛。由于多相电机的可靠性强,电机断相状态下工作状况一直是研究的热点。Dae-Woong Chung等提出了一种基于有效作用时间的PWM调制算法[3];Yifan Zhao等采用矢量空间解耦的思路创立了六相感应电机断相时的数学模型[4];欧阳红林等给出了六相永磁同步电机缺相时不对称运行的矢量控制方法[5]。Ahmed S Salem等研究了九开关变换器采用SPWM算法驱动电机的容错策略[6];李山等研究了应用SVPWM对六相电机的缺相控制[7];王永兴等研究了六相永磁同步电机缺相的容错控制[8];杨金波等研究了单相断路后PMSM的数学模型与控制[9]。Carlos A Reusser等研究了九开关变换器在现代舰船电力推进系统中的应用,并且研究了在全电推进中电机故障时的容错控制[10]。
本文在九开关变换器驱动的双Y移30°永磁同步电机系统中,采用基于有效作用时间的载波调制PWM控制方法,对正常工作、单相断路和两相断路不同情况下的电机展开控制,电机系统如图1所示。
1 九开关变换器控制方法
1.1 九开关变换器的工作原理
九开关变换器是在背靠背变换器的基础上减去三个开关管演变而来[11],如图2所示。
相比于传统变换器,九开关变换器降低了生产成本并且提高了可靠性。九开关变换器正常工作时必须满足2个原则[12]:① 任意时刻同一支路上应有2个开关管开通,中间开关管的通断由上、下2个开关管通过“异或”的运算控制;② 任意时刻的支路电压VAN和VDN必须满足VAN≥VDN。九开关变换器的开关方式遵循以上原则,根据上述原则,可得同一支路上开关信号与输出电压的关系,如表1所示。
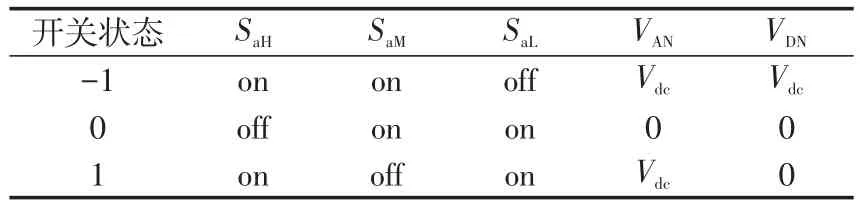
表1 九开关变换器开关状态Tab.1 Switch state of nine-switch converter
1.2 控制方法的基本原理
基于有效作用时间的载波调制PWM控制方法,主要考虑的是有效电压以及其有效作用时间[13]。根据九开关变换器的工作原理,以A、B两相为例,输出的相电压值只有0和Vdc2种,当SaH和SbH开关信号不同时,才会产生有效电压,如图3所示。
图3中:tA和tB分别为变换器中A和B相开关管的虚拟开关时间;和是A、B相电压的给定值,在一个周期中,平均输出电压为
式(1)中,teff表示为有效作用时间,teff=tA-tB。
当采样周期Ts和直流侧电压Vdc保持不变时,uaverage由teff确定。也存在当tA>tB时,teff<0 ,此时uaverage<0。
根据上述原理,在九开关变换器中,各相通断时间如图4所示。
可以得出:
由静止变换矩阵可得:
根据式(2)、(3)可以求出开关管通断间隔时间,即虚拟开关时间,由式(4)得出teff的值,即
式(4)中:tmax表示为虚拟开关时间中最大值;tmin表示为虚拟开关时间中最小值。
在一个采样周期内,teff的位置可以随意安排。为了得到开关管实际的通断时间,还需要对teff进行偏移,根据式(5)可以开关管的实际通断时间。
将一个采样周期Ts平均分为2部分,前半部分时间为“on”时间,后半部分时间为“off”时间[12],如图5所示。因此,九开关变换器的上下6个开关管的通断时间为:
式(6)、(7)中:tAon、tBon、tCon、tDon、tEon、tFon表示为6个开关管的导通时间;tAoff、tBoff、tCoff、tDoff、tEoff、tFoff表示为6个开关管的关断时间。
2 电机数学模型
为了简化分析,对双Y移30°永磁同步电机作下列假设[14]:① 磁路线性,忽略磁滞及涡流损耗;② 不计定子表面齿、槽的影响,转子上无阻尼绕组;③ 绕组正弦分布;④ 忽略电机漏感。
2.1 变换矩阵的确定
在自然坐标系中,电压和磁链方程为:
式(8)、(9)中:Us、Is、ψs为电压矩阵、电流矩阵、磁链矩阵;F(θ)s、Ls、Rs为磁链系数矩阵、定子电感系数矩阵、电阻矩阵;ψf为永磁体在各相绕组产生的磁链幅值。
电磁转矩方程为:
式(10)中:np表示为电机极对数;id、iq表示为旋转坐标系d轴、q轴的电流。
当电机发生断相时,如F相断路后,将正常六相系数矩阵去掉第6行和第6列,可以得到断相后的系数矩阵。如AF两相断路后,将正常六相系数矩阵去掉第1行、第1列、第6行和第6列,可以得到断相后的系数矩阵[15]。
2.2 静止变换矩阵
电机的静止变换矩阵为:
将九开关变换器的27种开关状态矢量投影到三个相互正交的平面:α-β平面、z1-z2平面、o1-o2平面,其中,α-β平面为机电能量转换子平面[16]。
当电机发生断相故障时,电机不对称运转,根据公式以及与幅值不变的约束条件,可以得出电机F相断路后和AF两相断路后的静止变换矩阵[17]。
变换到旋转坐标系中,变换矩阵为:
式(14)、(15)中:
2.3 矢量空间解耦方程
将式(11)~(15)分别代入式(8)和(9)中,可以得到新的电压方程
引入p微分算子
可以得出旋转坐标系中电流与电压的数学关系。
当F相断路时,
当AF两相断路时,
3 仿真分析
在Matlab/Simulink软件中进行仿真实验,对文中提到的九开变换器驱动六相永磁同步电机控制方法进行验证[18]。
九开关变换器的开关频率为10 kHz,直流母线电压设定为Vdc=300 V,PMSM参数为:R=0.291 Ω,Ld=Lq=4.586 mH,ψf=0.049 6Wb,J=0.052kg·m2,np=2,电机负载转矩初始为TL=1 N·m,1s后TL=5 N·m,电机由静止启动,给定转速为n=100 r/min。仿真结果如图6所示。
图6a)显示了电机磁链图,是一个圆形轨迹,谐波分量较小;图6 b)显示了电机定子侧六相电流,为正弦波;图6 c)显示了电机转子以给定的转速保持平稳运转;图6 d)显示了电磁转矩随负载转矩变化,保持电机的平稳可靠运行。
当电机绕组发生断路时,假设电机其他参数没有发生变化,给定负载转矩TL=5 N·m,给定转速为n=100 r/min,系统仿真图如图7、8所示。图7中,a)~c)给出了电机F相断路后定子侧六相电流、转子转速和电磁转矩。图8中,a)~c)给出了电机AF两相断路后定子侧六相电流、转子转速和电磁转矩。
图7a)显示了F相断路后定子侧六相电流;图7 b)显示了F相断相后转子转速,可以看出转速波动较小;图7 c)显示了F相断相后电机输出的电磁转矩,脉动较小,电机可以维持稳定运行。图8 a)显示了AF相断路后定子侧六相电流幅值相等,相位差为90°;图8 b)显示了AF相断相后转子转速,可以看出转速波动较小;图8 c)显示了AF相断相后电机输出的电磁转矩,脉动较小,电机可以维持稳定运行。
仿真的结果证明了该算法的正确性。
4 结论
本文依据九开关变换器的工作原理,应用了基于有效作用时间的载波调制PWM方法,对六相永磁同步电机展开了控制,并进行了仿真实验。当电机发生单相断路或者两相断路时,应用本文研究的控制方法,电机容错能力增强,有效减少了断相后的转矩脉动,满足其平稳运行的要求,提高了系统的可靠性。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
建材发展导向(2021年16期)2021-10-12 05:39:02
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2020年6期)2020-12-14 07:16:54
中学课程辅导·教学研究(2018年3期)2018-06-15 11:36:48
中国核电(2017年1期)2017-05-17 06:10:12
光学精密工程(2016年3期)2016-11-07 09:03:49
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年21期)2014-04-04 12:32:08
