
联结翼无人机着舰性能分析
2018-10-12 05:09:06郭卫刚
海军航空大学学报 2018年4期
郭卫刚,李 涛
(1.海军航空大学,山东烟台264001;2.海军4808军械修理厂,山东青岛266044)
随着航空技术的发展及其应用领域的扩大,无人机已经被全世界所热捧,而舰载无人机作为未来海战场中的倍增器,一直受到各国海军的重视。但无人机着舰时周围环境恶劣,因而要求飞行精度高,控制灵敏,响应快,但目前的无人机大多采用的是常规布局或飞翼布局,而且国内外的研究工作主要集中在控制规律和引导技术等方面领域。文献[1-4]对无人机纵向和侧向着舰的控制策略和控制律进行了研究。文献[5]对无人机自主着舰的引导技术和引导算法进行了研究。文献[6]不仅设计了着舰时的增稳系统和自主飞行控制系统,还进行了试飞验证。文献[7-8]主要是对飞翼无人机的动力学特性和控制律进行分析。目前,国内外对联结翼无人机着舰时的飞行性能研究的非常少,很难找到相关的资料或文献。仅有的研究也主要集中在气动布局和结构分析上。联结翼飞机具有重量轻、强度大、气动特性优良、操稳特性好、可以实现直接力控制等优点[9-13]。本文正是根据联结翼飞机的特点,设计出一种联结翼无人机,通过计算分析及试验试飞,验证了此型联接翼无人机的飞行性能及操稳性能可以满足着舰需要。
1 飞行设计方案
飞行场地由飞行空域、起飞跑道、空投区和拦阻着舰区组成。无人机在起飞区起飞,起飞和着舰方向固定,无人机起飞后,自动识别靶标,降低高度后分别向每个靶标空投1个模拟救援物品。空投完成后,在动平台完成触舰复飞。此时动平台处于静止状态,位置坐标不定。无人机触舰复飞后需重新建立着舰航线并在动平台上勾索着舰。着舰过程中,拦阻钩须自动放下,动平台启动时机为随机设置,移动速率在1.5 m/s至2 m/s之间变速。
联结翼无人机总体气动布局如图1所示。

图1 无人机气动布局Fig.1 Aerodynamic configuration of UAV
无人机采用固定翼设计方式,安装有可自动放下的拦阻钩和空投装置。无人机翼展为2.22 m,机长为2.2 m。其中,前翼安装在机身下部,后掠角为45°;后翼安装在机身上部,前掠角为-45°。机翼采用单梁式结构,以悬臂梁的形式安装于机身上,并在翼梢上加装了翼尖小翼(即端板)。无人机共有5个操纵舵面。其中,2个位于前翼的翼梢,2个位于后翼的翼根,1个为方向舵。动力装置安装在无人机头部,采用的是汽油发动机。起落架为带有减震、不可收放的前三点布局,以滑跑方式进行起飞和降落。无人机的机载电气设备和飞控系统安装在机身内部。机载电气设备主要有GPS模块、高清可见光摄像机、红外摄像机和无线图传模块。采用GPS/红外/光电的复合引导方式。
2 飞行动力学模型
为了验证无人机的性能,需要进行大量的试验试飞,并对每次试飞结果进行分析,效果如不理想,就要对无人机的气动结构、重心位置、控制规律及引导参数等进行调整优化,以便于进一步改进。无人机在上升、下滑、投掷、复飞及着陆过程中主要采用以下动力学方程[14-16]。
航迹坐标系的质心动力学方程:

式(1)中:m为无人机质量;v为无人机航迹速度;T为发动机拉力;φ为发动机安装角;γ为航迹倾斜角;μ为航迹滚转角;L、D、C分别为无人机的升力、阻力和侧力。
机体坐标系中,转动动力学方程为:
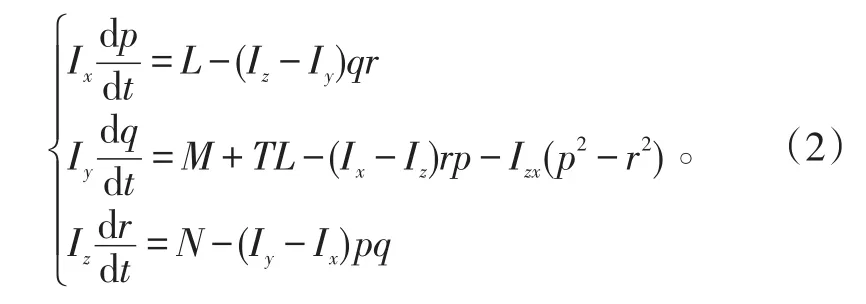
式(2)中:p、q、r分别为无人机滚转、俯仰、偏航角速度;Ix、Iy、Iz为无人机惯性矩;Izx为无人机惯性积;L、M、N分别为滚转、俯仰和偏航力矩[17-18]。
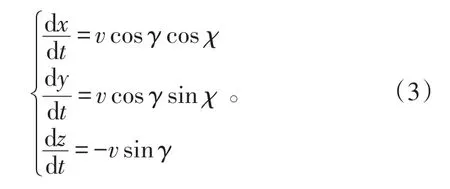
无人机质心运动学方程:
转动运动学方程:
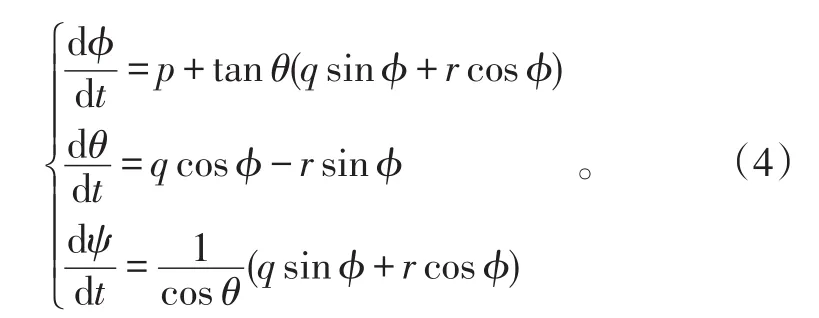
式(4)中:ϕ、θ、ψ分别为无人机的滚转角、俯仰角和偏航角。
3 试飞结果与分析
经过试飞调整,无人机可以较好地完成自主起飞、航线飞行、投掷、触舰复飞及下滑着舰拦阻任务。以某次成功完成规定任务的飞行为例,对无人机试飞过程进行了跟踪分析。整个飞行过程持续了369 s,无人机状态稳定,飞行性能优良,达到了预期的效果。
图2给出了无人机飞行高度变化曲线。起飞时,飞行高度指令给出的高度为70 m,无人机从地面滑跑后高度迅速增大,到达预定高度后有所超调,随后无人机及时调整,短暂平飞后随即降高,准备第1次投掷,投掷给出的指令高度为35 m,实际投掷高度32 m,此时图中出现第1个波谷。投掷结束后,无人机增加高度,平飞后进入第2次降高投掷阶段,指令高度35 m,实际投掷高度32.56 m,图中出现第2个波谷。2次投掷结束后,无人机爬高平飞调整,随即进入触舰复飞阶段,无人机高度不断降低,直至为0。复飞成功后,高度又迅速增加,后经过平飞调整最后进入下滑着舰阶段,无人机高度持续降低,最终拦阻着舰成功。
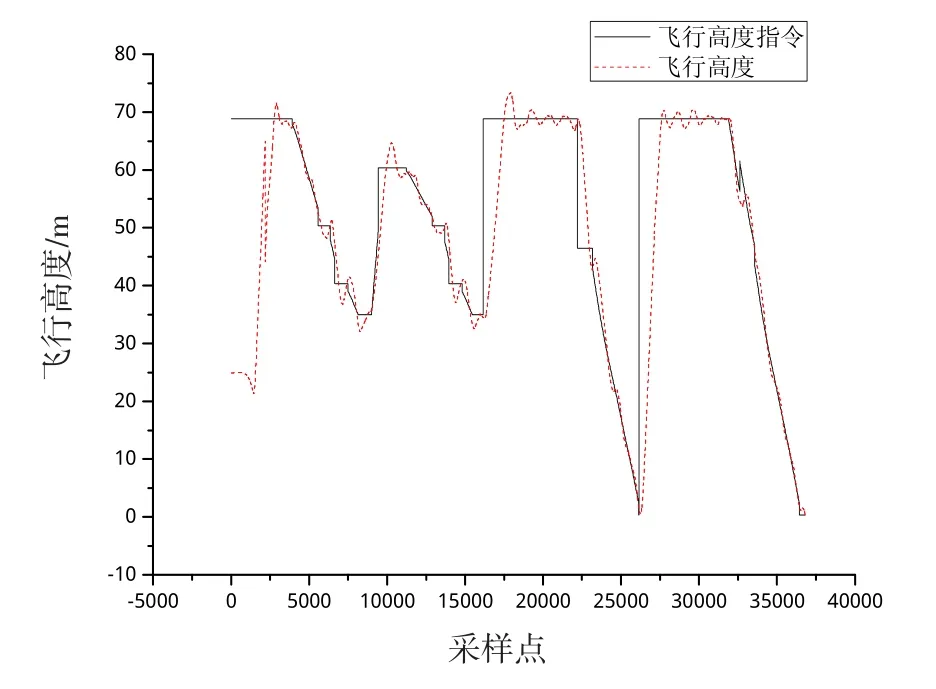
图2 飞行高度变化曲线Fig.2 Flight altitude variation curve
图3可以看出,无人机在飞行过程中,由于受到外界风的扰动以及无人机高度的超调,其实际飞行高度会围绕指令高度上下波动。因此,高度变化率指令会及时给出调整方案,实际的高度变化率也会根据给出的指令做出反应。

图3 高度变化率曲线Fig.3 Variation ratio of flight altitude curve
无人机在上升、平飞、投掷、复飞及着舰过程中,油门会根据无人机状态及时做出调整。如图4所示。起飞初期,因无人机处于上升阶段,此时油门位置处于100%状态,图中出现第1个波峰。改平飞后,油门减小,投掷结束后因需增加高度增大拉力(图2),油门加大,出现第2个波峰。第2次投掷结束后,油门又出现第3个波峰。复飞时,油门增大,出现第4个波峰。随后进入下滑着舰阶段,油门减小,直至拦阻成功,发动机关闭。

图4 油门位置变化曲线Fig.4 Throttle position variation curve
图5的空速变化曲线表明,无人机在起飞及投掷阶段,飞控给出的空速指令为28 m/s;无人机起飞后速度迅速增加,因受外界扰动,速度围绕28 m/s振荡调整;触舰复飞时,速度减小,空速指令降为18 m/s;复飞成功后,无人机加速上升,随后进入下滑着舰阶段,飞行指令降为18 m/s并保持,其目的是防止无人机拦阻未成功从而能有一定的初速度及时复飞。在整个飞行过程中,无人机的俯仰角也处在不断的振荡调整中,由图6可见,无人机的俯仰角跟随飞控的指令还是比较满意的。
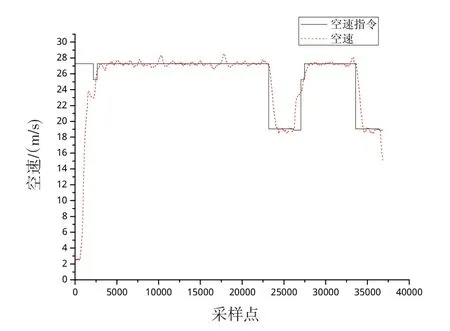
图5 空速变化曲线Fig.5 Air speed variation curve

图6 俯仰角变化曲线Fig.6 Pith angel variation curve
4 结论
根据着舰要求,设计了一种联结翼无人机。通过对起飞、上升、投掷、下滑、触舰复飞及拦阻着舰过程的试验试飞,无人机无论在飞行高度、飞行速度、油门响应还是姿态的控制上都能够很好的跟随飞控发出的指令,并在状态发生变化或外界出现干扰偏离预设值时,能够及时地调整到理想状态。飞行结果表明,此型联接翼无人机的飞行性能优良,操稳品质好,控制引导方法精确有效,完全满足着舰飞行要求,可为舰载无人机的设计提供技术支持和参考依据。
猜你喜欢
航空维修与工程(2022年11期)2022-02-06 06:37:28
热带作物学报(2021年1期)2021-02-22 07:31:25
岷峨诗稿(2020年4期)2020-11-18 23:54:01
储能科学与技术(2019年2期)2019-03-08 09:26:04
科技信息·中旬刊(2018年9期)2018-10-21 12:27:55
中国新技术新产品(2017年3期)2017-03-07 09:02:42
航空模型(2016年5期)2016-07-25 08:59:26
山西化工(2016年6期)2016-04-09 07:17:41
百科探秘·航空航天(2015年12期)2015-11-07 07:05:52
发明与创新·小学生(2013年8期)2013-04-29 00:44:03
