
典型雷达信号对瞬时测频接收机的影响
2018-10-12 05:08:46刘丽明赵建鹏
海军航空大学学报 2018年4期
刘丽明,姚 啸,赵建鹏
(91336部队,河北秦皇岛066326)
瞬时测频(Instantaneous Frequency Measurement,IFM)接收机是目前国内外雷达侦察系统普遍优选的测频接收机,具有截获概率高、瞬时带宽大、测量速度快、体积小等优点[1]。
随着战场电磁环境的日趋复杂,采用瞬时测频体制的雷达侦察设备不可避免地受影响,尤其是其宽频段、全方位接收特性[2],使人为和自然的、敌方和我方的、对抗和非对抗的各种电磁辐射信号进入接收机[3],巨量电磁信号的进入极易造成接收机测量错误或通道阻塞,从而出现虚警、漏警、系统死机等现象,影响操作人员对敌方威胁目标的判断、告警,甚至直接对作战结果产生影响。同时,对于一些特殊信号形式的雷达信号,瞬时测频接收机受技术体制的限制,无法实现正常的接收、正确的分选或引起性能下降。因此,研究该情况下的工作机理及所受影响,对分析和解决侦察装备在复杂电磁环境下出现的各类问题,规避风险,具有非常积极的作用。
1 瞬时测频接收机原理
瞬时测频接收机通常指比相法快速测频体制接收机。图1所示是一种典型的瞬时测频接收机组成,包括功率分路器、多个频率经相位到幅度的转换器,以及幅度到数码的编码器、把各路码元和在一起产生最终的频率码的译码器。
外界的雷达信号,首先,经限幅放大器、带通滤波器和功分器,分成无延迟通道和延迟通道2个通道;随后,进入鉴相器,经检波、差分放大和量化编码;最后,由解模糊电路输出标准二进制频率码[4]。
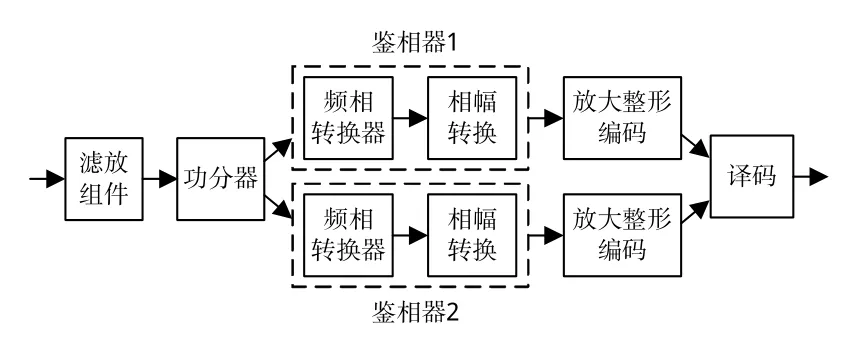
图1 瞬时测频接收机原理Fig.1 Principle of IFM receiver
2 几种典型雷达信号对瞬时测频的影响
从雷达信号辐射、接收和处理等方面看,影响瞬时测频接收机性能的雷达信号样式主要有以下几种。
2.1 连续波信号
连续波体制具有平均功率条件下对隐身目标探测能力更强,并具有低截获特性较强的抗干扰能力,因而在军用雷达领域得到广泛应用。当环境中存在连续波信号时,环境中其他信号与连续波信号总是同时到达。因此,将阻塞接收通道,影响接收机的正常工作[5]。
通常情况下,瞬时测频接收机检测到连续波后,自动将检测门限抬高到连续波信号幅度之上,从而保证在有连续波的情况下对脉冲信号的频率、方位等参数正确测量,这种方法带来的缺点是系统灵敏度的下降、大量的脉冲信号丢失。目前,更多的设备采取加装带阻滤波器组件的方法来降低连续波对接收机的影响[6]。
2.2 高占空比信号
选择合适的占空比是提高雷达探测距离需要考虑的重要因素[7],而在雷达信号分选过程中,高的占空比极易导致接收处理信号丢失。在实战环境中,高威胁信号通常占空比较大,高占空比信号始终占用接收机的处理时间,使与该信号在时间上相关(脉冲同步)的其他信号无法使用处理资源,从而造成低占空比信号的漏警[8]。
2.3 同时到达信号与重叠信号
当2个信号的脉冲前沿在时间上同时出现,即t=0时,如图2所示,称为同时到达信号[9],主要影响频率测量的结果,频率测量误差取决于2个同时到达脉冲的相对幅度,通常情况下,只有当2个脉冲的幅度差小于某一阈值时,会产生较大误差[10]。这是由于2个信号的射频经鉴相器检测输出,在视频上叠加后使被测信号频率的极性角产生量化偏移,导致输出相位出现偏差,一旦相位误差值超出解模糊相位容差的限值,则会使输出相位的数字量产生比特错位[11]。

图2 脉冲信号到达示意Fig.2 Schematic diagram of pulse signal arrival
当2个信号的脉冲前沿在时间上不是同时到达,但到达的时间差较小,脉冲的一部分在时间上重叠,可称作重叠信号。IFM接收机能否完成频率的正确测量或满足一定的测频精度,均与同时到达信号或重叠信号之间的信号脉冲幅度和脉冲宽度有关。
0<t≤T0,T0为编译码的过渡时间,IFM的测量结果是当2个信号幅度差小于某一定值时,频率测错;2个信号幅度差大于该值时,测频、测向均能对大信号正确测量,忽略小信号。
T0<t≤Tmin,Tmin为接收机恢复时间,IFM接收机测量第一个脉冲,其余脉冲丢失[12]。
2.4 低截获概率(LPI)雷达信号
施里海尔为衡量雷达的被截获性能提出了截获概率因子α的定义:
式(1)中:RI为侦察接收机能发现LPI雷达辐射信号的最大距离;Rr为LPI雷达对侦察接收机平台目标的最大发现距离。[13]
根据截获概率因子α的计算公式,可以得到:当α>1时,侦察接收机能够探测到雷达辐射的信号,但是雷达不能发现搭载侦察接收机的平台目标,此时侦察接收机先于雷达发现对方,雷达有可能受到对方干扰甚至摧毁;当α<1时,雷达能发现侦察接收机的平台目标而侦察接收机不能探测到雷达信号,无法判断威胁,此时雷达先于侦察接收机发现对方,对α<1的雷达,通常被称作低截获概率雷达(“寂静”雷达)[14]。α越小,雷达的反侦察性能越好。
目前,国外已出现了多种新型低截率雷达,例如:TWSQR、M2140、PILOT和俄制“首领”及“先知”等雷达系统[15]。由于瞬时测频接收机在设计过程中往往采用大的频带宽度,接收机灵敏度无法做得更好。因此,难以发现这一体制的雷达。
3 仿真验证
文献[16]给出了同时到达信号与重叠信号对瞬时测频接收机的影响的仿真验证,本文不再赘述。利用半实物仿真系统和雷达侦察设备样机对复杂电磁环境下连续波信号和高占空比信号对瞬时测频接收机的影响进行仿真验证[17]。
3.1 连续波信号对瞬时测频接收的影响验证
瞬时测频接收机工作参数:工作频段4~18GHz(分为通道1:4~10GHz;通道2:10~18GHz),天线接收范围为0~360°。
设置复杂电磁环境:信号数量100部,频段4~18GHz,方位分布0~180°。信号功率:高于瞬时测频接收机灵敏度5~10dB。
连续波信号参数设置:中心频率9.0 GHz。功率设置:高于瞬时测频接收机灵敏度3dB。
实时监测测频接收机输出的频率码,根据设置信号参数将各频率分量归并,统计分析测出频率的信号数量,仿真结果如图3所示,实验中发现,连续波信号出现后,连续波信号频率所在的瞬时测频接收的通道(通道1)被阻塞,分选信号数量急剧降低,另外一个通道工作未不受影响。
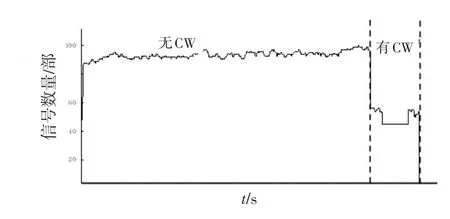
图3 连续波出现前后测频接收机信号分选情况Fig.3 Sorting results of IFM receiver with and without a CW signal
3.2 高占空比信号对瞬时测频接收的影响验证
设置复杂电磁环境:信号数量80部,频段6~18 GHz,方位分布0~180°。信号平均功率:高于瞬时测频接收机灵敏度5~10dB。
高占空比信号数量分别设置为0、2、5、8、15、20。
进行对比仿真实验,记录信号分选正确数量、增批数量和高占空比信号分选正确数量,结果见图4。
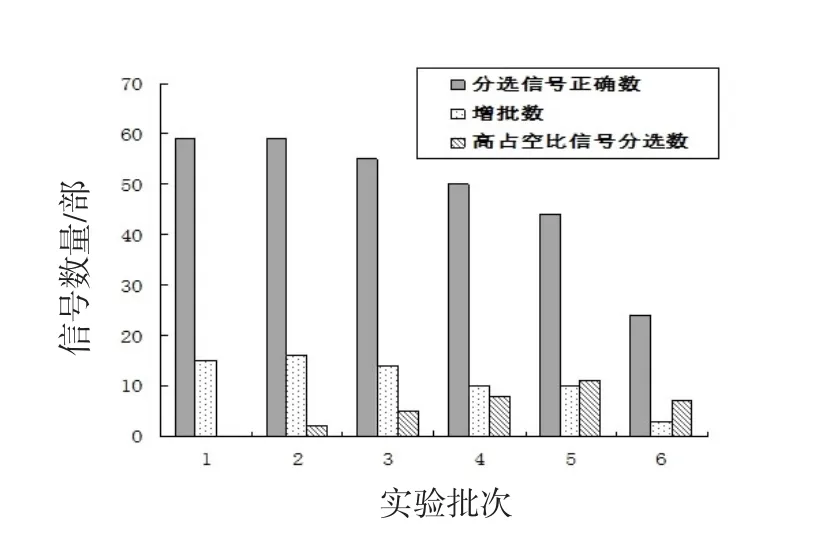
图4 高占空比信号条件下测频接收机信号分选情况Fig.4 Sorting results of IFM receiver with high duty-cycle signals
从测试中看出,一定数量的高占空比信号直接对瞬时测频接收机的工作产生影响,随着该类信号的增加,接收机对信号的测量能力下降,当高占空比信号的数量达到某一阈值时,接收机的性能将出现较为明显的下降。
3.3 LPI信号对瞬时测频接收的影响验证
设置LPI雷达一部,搭载平台为飞机,信号形式为连续波调频,中心频率9 000 MHz,信号功率30 mW,瞬时测频接收机接收搭载平台为地面移动站,覆盖空间范围为360°,灵敏度设置为无衰减状态。保持连续波调频信号稳定输出,模拟该雷达由远及近向瞬时测频接收机运动。仿真结果表明,在132km处雷达能够稳定探测到地面移动站,而地面移动站在27.9km处首次完成对连续波调频信号的分选。此时,截获概率因子α=0.211,小于1[18]。
4 结束语
电磁环境的日益复杂,使采用瞬时测频体制的接收机不可避免的受到影响。就目前技术条件来看,可采用措施来降低各种因素对接收机性能或稳定性的影响,但由于技术体制限制,还无法完全克服,可考虑采用全数字化接收机,多通道并行处理技术等解决。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
数学物理学报(2022年3期)2022-05-25 13:33:28
遥测遥控(2020年3期)2020-09-17 13:38:46
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中成药(2017年12期)2018-01-19 02:06:54
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
现代计算机(2016年34期)2016-02-28 18:35:40
电子科技(2015年2期)2015-12-20 01:09:10
