基于压力传感器及支持向量机的人体运动识别系统
2018-10-09 03:00王晋
电子设计工程 2018年18期
王晋
(西安工业大学陕西西安710021)
人体运动状态的检测主要是利用计算机或者其他的移动设备或者数据进行收集和分析,实现人体目前运动状态的智能识别和记录。人体运动检测在行为分析、运动员姿态矫正及医疗检测等多方面具有辽阔的使用前景。但是目前对于人体运动状态识别研究过程中,主要包括以下两方面的问题。第一方面,就是设备具有较高的要求,并且是被的精度比较低。比如,在设置传感器设备的过程中,一般只需要考虑并且假设设备在某个方向中不发生变化[1]。但是在实际情况中无法实现,在测试人员运动较为激烈的情况下,设备在方向中就会出现变化。基于此,本文所研究的人体运动识别系统中具有一定的自动校正方向的优势,能够利用方向传感器实现数据映射变换,以此有效提高预测精准度。另外,数据学习过程中需要的数据集比较大,在实现数据学习的过程中,传统模式识别或者人工网络能够在数据训练过程中使用,但是小样本集传统方法无法得到良好的效果。本文所设计的人体运动识别系统能够实现运动状态的建模和分析,不仅能够保证运动识别的精准性,还能够避免高负荷数据的收集。支持向量机能够利用数据理论提高识别精准度[2]。
1 人体运动分析
为了能够全面分析人体运动,就要全面掌握运动生物力学中的常用参数,比如加速度、位移、力、惯量等,图1为人体在运动过程中所需要的加速度。

图1 人体在运动过程中所需要的加速度
速度增量和需要的时间比值就是平均加速度,瞬时加速度为时间无限小时平均加速度极限值。加速度属于矢量,方向和速度方向、位移方向一样[3]。
平均角速度指的是在一点时间中角位移和时间之间比,瞬时角速度指的是无限小时平均角速度极限值,角速度指的是矢量,方向规定和角位移一样,本文所研究的输出角速度曲线详见图2。
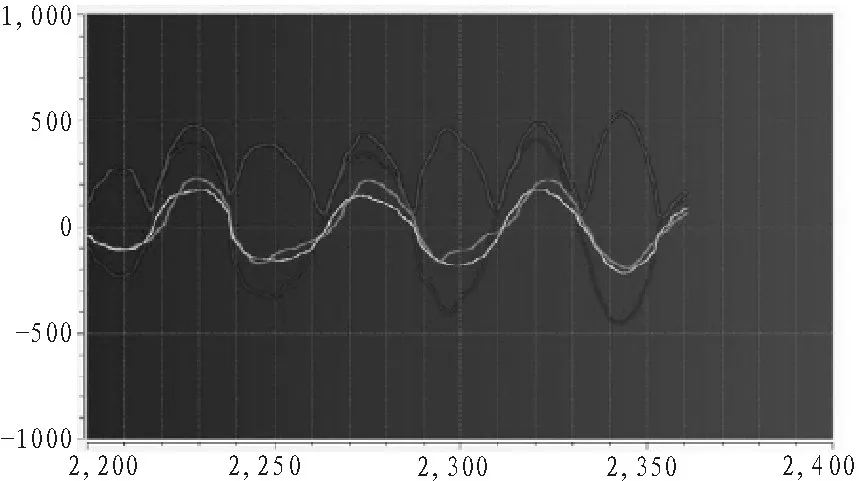
图2 输出角速度的曲线
图3为腰部俯仰角的曲线,左右肩关节连线中点和左右髋关节连线中点的连接线和竖直之间的夹角,这就是躯干夹角。比如人在弯腰时候,人体躯干和竖直方向夹角。图3就是向前屈身俯仰角作为负值,实际的躯干倾角竖直在图中对称曲线中分布[4]。

图3 腰部俯仰角的曲线
在人体运动的时候,我们对其进行描述时候主要包括人体轴面及轴向,通过解剖学的角度进行分析,基于标准姿态,一般都是进行3种互相垂直切轴及切面,详见图4。文中所研究的人体运动分析使用解剖学轴面,简单来说就是额状面能够分离人体成为前部分和后部分,矢状面能够将人体分离成为左部分和右部分,水平面能够将人体分离成为上部分和下部分[5]。

图4 人体的轴面示意图
要想收集人体运动数据并且对其进行相应的研究,就要全面掌握人体结构。那么本文就将人生理结构作为刚体,每段刚体直接使用关节相互连接,以此使人体能够抽象成为连接型的系统。本文使用汉纳范模型作为人体模型,在人体运动过程中,手和脚都是局部运动,但是本文所研究的是人体肢体整体运动,以此对手脚运动影响全部忽略,将人体运动模型简化成为是一个环节,之后根据不同环节和本文所使用的动作捕获系统传感器之间的对应关系重新设置[6],详见图 5。

图5 简化的汉纳范人体模型
2 人体运动识别系统的设计
2.1 人体运动信息收集装置的设计
2.1.1 信息收集装置
人体运动信息收集装置在无线局域网结构中是一种信息收集终端。在现代微机电系统技术越来越成熟的过程中,其体积越来越小,功耗越来越低,可靠性也在不断的提高,这种传感器也应运而生,此也成为了人体运动信息收集装置。在实现便携式人体运动信息收集装置的过程中,首先要对运动数据类型进行确定,之后确定创安器类型[7]。
文中所研究的人体运动信息收集装置主要包括三轴加速传感器、数字陀螺仪、电池和SD卡。传感器的主要目的就是实现加速度信息的测量,陀螺仪的主要目的就是实现角速度的测量,单片机属于识别系统的核心,SD卡属于系统存储介质,电池能够为系统提供能量[8]。图6为人体运动信息收集装置的结构。

图6 人体运动信息收集装置的结构
2.1.2 器件型号的选择
在设计运动信息收集装置的过程中,器件型号的选择尤为重要,其能够有效决定装置电路的设计质量、功耗、体积、性能和成本,在选择具体器件之后,就表示确定了系统结构和电路设计。
文中所使用的三轴加速度传感器能够有效检测人体的运动加速度信息,MM4521属于以微机电技术为基础的低成本电容式加速度传感器,并且内部还设置了信号调理,通过AD转换之后能够对不同方向中加速度进行计算,能够在人体运动是被装置中使用。并且其工作电流较低、工作电压较低、体积较小、灵敏度较高,而且价格较为便宜[9]。图7为加速度传感器的测量方向。
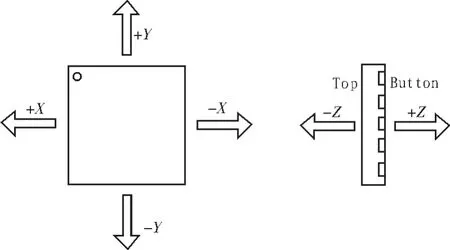
图7 加速度传感器的测量方向
其中剪头指的方向就是加速度方向,在传感器从某方向中存在加速度的时候,传感器就表示此方向输出具有一定的变化,所以在确定传感器和人体位置的时候,利用简单换算就能够得到人体在不同方向的加速度。
文中所研究装置中的数字陀螺仪能够实现角速度信号的测量,传统三轴陀螺仪能够测量多轴角速度数据,一般都使用两个以上感知器件。为了能够提高感知有效率,要在三轴陀螺仪中添加感知器件对正交轴角速度数据进行检测,此种创新性的设计能够对测量过程中不同轴的信号干扰进行消除,从而有效提高输出数据可靠性就进度,并且扩大产品使用的范围[10]。图8为三轴陀螺仪的测量。
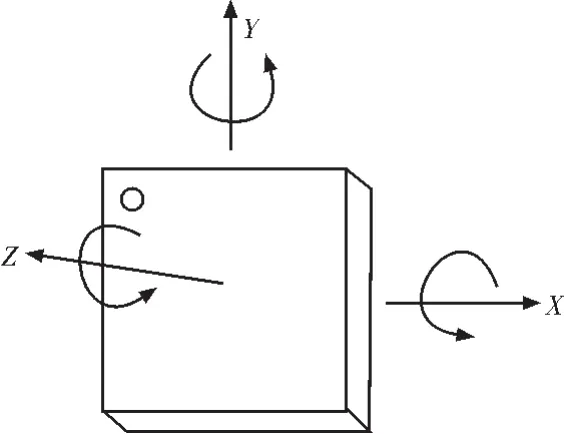
图8 三轴陀螺仪的测量
三轴加速度传感器输出属于模拟电压信号,电压信号要利用AD转换成为数字信号实现处理。之后实现主要接口电路的设计,在进行接口电路设计的过程中要充分考虑噪声影响,因为加速度传感器在工作过程中会出现噪声,为了能够有效提高输入电压精准性,就要在传感器输出端添加RC滤波器[11]。图9为主要接口电路的设计图。

图9 主要接口电路的设计图
2.2 创建识别算法平台
图10 为人体运动姿态的识别软件框架,根据其中的功能模块实现识别算法平台的创建。
2.3 信号的预处理

图10 人体运动姿态的识别软件框架
在实现信号预处理的过程中,可以使用陀螺仪信号实现,主要包括两部分内容,首先去除常量漂移;其次,去除随机噪声。为了简单方便,可以通过去均值的方法去除常量漂移,也就是在测量一段时间之后使用陀螺仪中的某个轴输出并且求均值,此均值数值为此轴的常量漂移,从测量的角速度数据中将此值进行减去,就能够去除常量漂移。为了便于实现信号预处理,可以使用四种小波基实现,以去燥效果决定实际使用过程中选择的小波基函数[15]。表1为不同小波基函数去燥之后的信号方差。
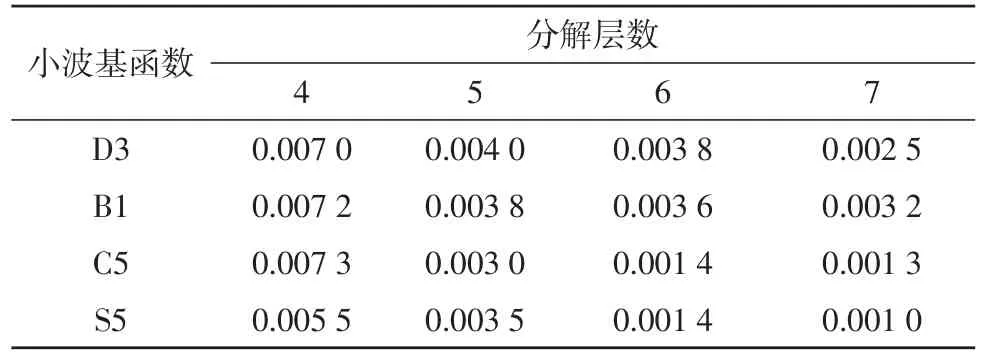
表1 不同小波基函数去燥之后的信号方差
通过表1可以看出来,去燥方差是在去噪尺度提高不断降低的,并且在分解尺度5的时候降低[16]。
3 实验
文中所研究算法将Lib为基础,其具有较多的功能,能够实现分类问题的有效解决,使用一对一组合分类的方法创建多类分类器。图11为人体识别系统识别模块的界面。

图11 人体识别系统识别模块的界面
文中从创建的数据库中提取二十个人的动作数据,以此实现预处理和提取特征,最后通过支持向量机进行识别,表2为动作相应的编号和识别率。

表2 动作相应的编号和识别率/%
通过表2可以看出来,支持向量机的识别效果良好,算法的设计较为合理,提取特征动作良好。
4 结束语
文中对人体运动和动作识别进行了全面的研究,并且创建了人体模型,提出满足自身需求的分析方法,设计动作识别系统,之后通过实验表示,其能够实现支持向量机动作识别。
猜你喜欢
当代水产(2022年6期)2022-06-29
北京航空航天大学学报(2021年9期)2021-11-02
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
百科探秘·航空航天(2017年9期)2017-12-31
中学生数理化·高一版(2017年3期)2017-07-08
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年1期)2016-02-06