基于信号聚集度的相控阵雷达识别技术*
2018-10-09 03:14:32张玉虎
火力与指挥控制 2018年8期
张玉虎,周 正
(海军航空大学,山东 烟台 264001)
0 引言
相控阵雷达在快速搜索能力、波束捷变能力和多波束形成能力等优势,使得对相控阵雷达的识别成为了辐射源信号识别的重点和难点。相控阵雷达搜索空域的工作模式多样,文献[1-3]通过相似系数来对相控阵雷达进行识别。顺序搜索模式的相控阵雷达与机械扫描雷达有一定的相似性,波位的转换是相邻的,因此,文献[1-2]采用了正弦序列,文献[3]采用了三角序列对相控阵雷达进行识别。但是基于相似系数的相控阵雷达体制识别方法严重依赖于截获信号的幅度,并且要找到合适的参考序列。本文建立了ESM截获相控阵雷达辐射源信号的模型,得到截获信号的脉冲幅度序列;并引入了信号聚集度的概念,通过判断不同体制雷达的信号聚集度差别,实现了相控阵雷达体制的识别。
1 ESM截获雷达脉冲幅度序列
1.1 ESM截获机械扫描雷达脉冲信号幅度序列
机械扫描雷达的工作方式是通过天线的机械旋转完成对360°空域的搜索,天线的旋转使得ESM截获雷达的信号是周期性的;雷达天线旋转一次,ESM就会接收到一次雷达信号的辐射脉冲序列。
假定某机械扫描雷达的天线方向图为高斯方向性函数。指定探测范围为方位-60°~60°,俯仰0°~50°,扫描周期为5 s,方位和俯仰上的波束宽度均为2°。侦察机在雷达视角的方向处。机械扫描雷达(0°,10°)天线方向图函数[4]可表示为:
在脉冲重复频率为 500 Hz、1 000 Hz、2 000 Hz条件下仿真得到ESM截获信号脉冲序列如图1所示。
1.2 ESM截获一维相控阵雷达脉冲信号幅度序列
一维相控阵雷达大多采用线性相控阵天线,雷达对目标空域搜索时方位上采用机械扫描[5-6],其天线方向图可以表示为:
其中,θ为方位角,方位波束宽度为2°。最大指向为θ0=0°。
俯仰上采用电扫描,具有N个天线阵元的等间距排布的线性相控阵雷达天线方向图函数可以表示为:
其中,φ为俯仰角,俯仰波束宽度为2°,天线阵元个数 N=30,最大值指向为 φ0=10°,d=0.5,则归一化的天线方向图函数为式(2)与式(3)的乘积:
对方位上 -60°~60°,俯仰 0°~50°的目标空域进行搜索,搜索周期为5 s,俯仰每一度一个波位。在脉冲重复频率为 500 Hz、1 000 Hz、2 000 Hz条件下仿真得到ESM截获信号脉冲序列如图2所示。
1.3 ESM截获二维相控阵雷达脉冲信号幅度序列假定某二维相控阵雷达采用60×60矩形平面
其中
其中,θ为波束方位角,φ 为波束俯仰角,F1(θ,φ)为方位方向的天线方向图函数,F2(θ,φ)为俯仰方向的天线方向图函数,方位与俯仰波束宽度均为2°,最大指向为 θ0=0°、φ0=10°。
对方位上 -60°~60°,俯仰 0°~50°的目标空域进行搜索,搜索周期为5 s,波位宽度与高度均为1°。在脉冲重复频率为 500 Hz、1 000 Hz、2 000 Hz条件下,仿真得到ESM截获信号脉冲序列如图3所示。
2 相控阵体制雷达辐射源的识别
对处于搜索模式的相控阵雷达,本文提出了一种基于信号聚集度的检测识别方法。
通过对ESM截获的信号序列按截获时间由早至晚进行比较,计算序列自相关系数,自相关系数峰值的间距即为信号的一个周期长度。
定义ESM截获信号序列的信号聚集度为:
其中,length为一个雷达信号扫描周期的脉冲数,interval为高于平均脉冲间隔的脉冲间隔的均值。
通过对机械扫描雷达、一维相控阵雷达、工作在顺序搜索模式、随机搜索模式的二维相控阵雷达的信号计算信号聚集度,得到如表1所示的结果。

表1 不同脉冲重复频率下信号聚集度
由计算结果发现,机械扫描雷达的信号聚集度最高,且与相控阵雷达的差距明显,区分度高;二维相控阵雷达的信号聚集度比一维相控阵雷达低;而二维相控阵雷达的随机搜索模式比顺序搜索模式的信号聚集度更低。进一步计算在脉冲重复频率为1 500 Hz、2 500 Hz、3 000 Hz条件下的信号聚集度,得到结果如图4所示。
通过统计数据得到:机械扫描雷达的信号聚集度高于200 dB;一维相控阵雷达的信号聚集度在(126 dB~130 dB)之间;二维相控阵雷达的信号聚集度在110 dB以下;上述实验表明通过计算截获信号幅度谱的信号聚集度,判断其落入那个区间中可以有效地判断雷达体制。
3 仿真实验
考虑ESM在截获脉冲信号时,由于信号环境密度高,存在丢失脉冲的情况[2,7]。因此,仿真实验按信号丢失率不同进行1 000次蒙特卡洛实验,得到结果如图5和第30页表2所示。
由图5可见,相控阵体制雷达信号的聚集度平稳性很高,信号的丢失对信号聚集度的影响很小。相比之下,机械扫描雷达的信号聚集度不太平稳,在一定范围内波动,并且当信号的丢失率升高时,机械扫描雷达的信号聚集度会下降。适当选择判别阈值能够提高信号的正确识别率。
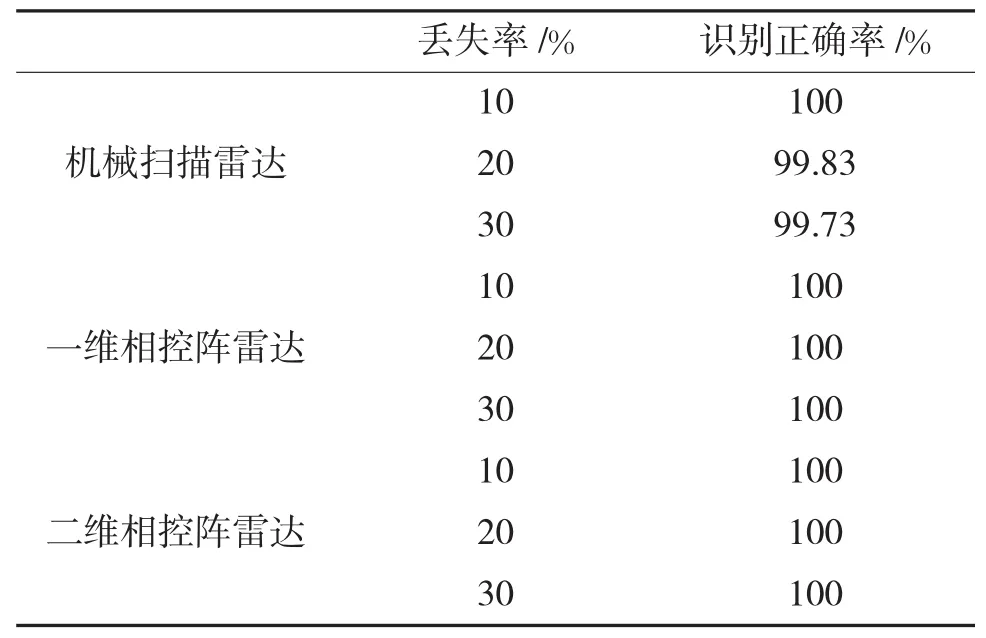
表2 不同丢失率下的雷达信号正确识别率
4 结论
本文利用ESM截获相控阵雷达辐射源信号的模型,得到截获信号的脉冲幅度序列;通过计算信号聚集度,实现了相控阵雷达体制的识别。仿真结果表明,本文提出的基于信号聚集度的相控阵雷达体制识别方法,在ESM截获信号丢失率低于30%的情况下,仍能有效地对辐射源雷达体制进行识别。本文方法不依赖于脉冲的幅度信息,仅用能表征是否存在脉冲的01序列即可识别,因此,无需寻找合适的序列作参考,更具有适用性。
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
煤气与热力(2021年3期)2021-06-09 06:16:16
航天电子对抗(2021年2期)2021-05-31 02:00:32
化工管理(2021年7期)2021-05-13 00:45:20
电子制作(2019年24期)2019-02-23 13:22:16
电子测试(2018年15期)2018-09-26 06:01:46
电子学报(2016年12期)2017-01-10 07:15:25
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00