
一种基于TOA的同型雷达同源判别方法
2021-05-31 02:00:32苏焕程程亦涵
航天电子对抗 2021年2期
苏焕程,程亦涵,张 君,王 昀,张 倩
(中国航天科工集团8511研究所,江苏 南京210007)
0 引言
电子侦察接收机通过信号分选在大量的脉冲信号中识别出可能存在的雷达信号,并与雷达数据库中已知雷达的对应参数进行匹配以给出这些批数据的辐射源类型、用途等信息,进而为下一步指挥决策提供依据。如果识别结果中存在增批的现象,那么将会给出一些并不存在的错误雷达信号,而对这些错误的雷达采取措施将会严重浪费有限的资源[1]。
所谓雷达增批,可以理解成在雷达分选处理中分选得到的雷达数目大于实际存在的雷达数目[2]。很多因素可能导致雷达分选出现增批现象:例如在复杂体制雷达的工作模式中载频、脉宽、重频等具有较复杂的样式使现有算法对其分选应用具有局限性,脉冲大量丢失破坏了原有脉冲间的规律及环境因素的影响等。为了解决增批问题,电子侦察接收机会需要通过合批算法进行增批信号识别和消除。
雷达信号合批算法通常基于雷达的重复周期、脉宽、载频以及角度等信息。然而,同级别的舰艇或者飞机编队通常都装备有相同型号的雷达[3],在实际侦察过程中,侦察接收机会不可避免地接收到多个相同型号的雷达信号。当侦察接收机的角度分辨率不足以区分多个雷达信号时,传统的雷达信号合批算法通常会将分选得到的多个特征参数相近的雷达信号归并为同一部雷达[4],结果造成了错误的合批,影响对敌方军事力量的准确判断。针对此问题,本文提出了一种对多个特征参数相近的雷达信号进行同源判别的方法,可以有效地判别出多个雷达信号是否属于同一部雷达。该方法适用于重频固定、重频参差以及重频组变等重复周期变化相对固定的雷达信号。
1 同型雷达归并问题
同级别的舰艇或者飞机编队通常都装备有相同型号的雷达。在军事训练、演习以及对抗过程中,常常会出现较近范围内2部或多部同型雷达同时工作的情况。此时,侦察接收机将会接收到多个同型雷达信号,如果角度分辨率不足以将多个雷达信号区分开时,则接收到的多个雷达信号的可用特征参数会基本相同(在容差范围内)。
以2部同型雷达信号为例,假定其发射的是重频固定的脉冲信号,则侦察接收机接收到的两个脉冲序列在时域上通常有以下3种可能:
1)脉冲序列相互叠加,如图1所示。

图1 脉冲序列相互叠加示例
由于2个脉冲序列在时域上相互叠加,侦察接收机通常无法区分开,在经过信号检测处理后输出一个展宽的脉冲序列,最终输出一部雷达信号。
2)脉冲序列相互交叠,如图2所示。

图2 脉冲序列相互交叠示例
由于2个脉冲序列在时域上相互交叠,考虑到侦察接收机信号分选算法的差异性,通常会可能输出1部二参差雷达信号或2部常规雷达信号。
对于第1种情况,涉及到对参差雷达信号判别的方法和准则,不在本文讨论范围。
对于第2种情况,由于2部雷达信号在时域上相互交叠,雷达信号合批方法只需要分析一下两者的脉冲序列在时域上的关系,相对容易作出正确判断。
3)脉冲序列互不交叠,如图3所示。
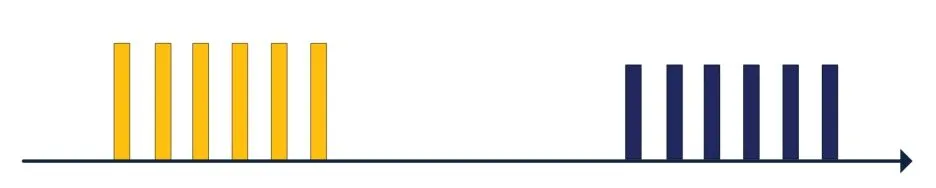
图3 脉冲序列互不交叠示例
由于2个脉冲序列在时域上间隔较远,电子侦察接收机通常会识别为2部雷达信号。但是由于2部雷达信号的特征参数完全相同,传统的雷达信号合批算法通常无法判断2部雷达信号是否属于2部独立的雷达,通常会将其归并为一部雷达信号。
综上所述,传统的雷达信号合批算法在同型雷达信号的判别方面存在着严重的不足,极易造成多个同型雷达被错误的归并为一部雷达。
2 本文方法
2.1 同型雷达同源判别
假定侦察接收机输出到内部信号分选模块的雷达脉冲序列的TOA可以表示为:

式中η是一个常数,这个值的引入是由于雷达信号TOA起始点的随机性导致的,N是雷达信号的PRI数值,i表示脉冲序号。
显然,如果2个脉冲序列同属于一部雷达,只是由于中间发生脉冲丢失而失去了连续性,则对于2个脉冲序列中的任意2个脉冲,其TOA满足:

式中,T(i)和T′(j)分别表示2个脉冲序列中序号为i和j的脉冲TOA数值。
根据(2)式可以得出以下结论:如果2个脉冲序列同属于一部雷达,则2个脉冲序列的任意2个脉冲的TOA,必定满足以下关系:

对于满足(3)式的任意2个脉冲序列,可称之为同源雷达信号,即它们发射的脉冲序列属于同一部雷达(同源)。
基于以上分析,本文提出雷达信号TOA同源距离的概念,如式(4)所示:

式中,T(i)和T′(i)分别表示2个脉冲序列中脉冲序号为i的脉冲TOA数值,N是雷达信号的PRI数值,M是对2个脉冲序列的脉冲个数取较小值。
同源距离的数值越小,表示2部雷达脉冲序列同属于一部雷达的概率就越大。如果不考虑TOA的测量误差,则同一部雷达的2个脉冲序列的同源距离显然等于0。在实际工程中,考虑到测量误差的影响,可以设置一个门限,当2个雷达脉冲序列计算得到的同源距离小于该门限时,则可以判定出2个雷达脉冲序列同属于一部雷达。
基于以上分析可知,通过对2个雷达信号所匹配的脉冲序列进行同源距离分析,可以判定2个雷达信号是否属于同一部雷达,确保合批处理的正确性。
2.2 同源判别方法改进
上节给出了对2个同型雷达信号是否属于同一部雷达的同源判别方法。但是在实际工程中,脉冲TOA的数值存在量化误差,导致估计得到的雷达信号PRI也存在量化误差,当2个雷达脉冲序列间隔较远时,PRI的量化误差会被不断的累积,造成同源距离的计算结果产生较大偏差,具体分析如下:
不妨假定侦察接收机内部的TOA量化精度为Δ(Δ>0),则 对 于 一 部 PRI固 定 为NΔ+Φ(0≤Φ<Δ,N为正整数)的雷达辐射源信号,接收到的第i个脉冲(i>0)的TOA可以表示为:

当iΦ满足MΔ≤iΦ<(M+1)Δ,且(i+1)Φ≥(M+1)Δ时,M为非负整数,序号为i的脉冲与序号为i+1的脉冲之间的TOA满足:

而当iΦ不满足以上关系时,则序号为i的脉冲与序号为i+1的脉冲之间的TOA满足:

由于雷达脉冲序列的脉冲间隔等于N或N+1,最终信号分选输出的雷达信号PRI等于N+Ω,其中Ω的数值与具体采用的信号分选算法相关,一般情况下不等于Φ/Δ。
由于Ω≠Φ/Δ,则估计的PRI数值与实际的PRI数值存在一个量化误差造成的差值:|ΩΔ-Φ|。
如果将带有该差值的PRI作为输入进行同源距离计算,则会计算得到偏差较大的结果。
文献[5]给出了一种基于余数周期的PRI精确估计算法,通过该算法可以较为精确的估计出雷达信号的PRI数值,降低量化误差造成的影响。
根据以上分析,对同型雷达信号的同源判别进行改进,不直接采用信号分选得到的PRI进行同源距离计算,而是首先采用文献[5]的PRI估计算法得到一个更为精确的PRI数值,在此基础上再进行同源距离的计算,可以大幅提高判别的准确性。
2.3 同源判别方法流程
在改进的同源判别方法基础上,给出同型雷达信号同源判别方法的完整处理流程:
Step1 根据侦察接收机具体采用的分选算法及测量误差分别设定门限T1和T2;
Step2 将侦察接收机经过分选输出的相同参数的雷达信号进行缓存,并提取相应的脉冲序列;
Step3 检查缓存区是否存在2个未经比较的相同参数的脉冲序列,如果存在则任意选择2个相同参数的脉冲序列,否则跳转到Step10;
Step4 采用文献[5]提出的算法分别估计2个脉冲序列的精确PRI数值;
Step5 计算得到的2个PRI数值的差值,如果差值超出设定的门限T1则判定这2个脉冲序列非同源雷达,跳转到Step3;
Step6 分别对2个脉冲序列进行编号并统计其脉冲个数,取两者脉冲总数的较小值,记为NMin;
Step7 计算Step5中得到的2个PRI数值的平均值,记为APri;
Step8 将NMin和APri代入(4)式,计算得到2个脉冲序列的同源距离H;
Step9 将Step8计算得到的同源距离H与设定的门限T2进行比较,如果小于该门限则判定2个脉冲序列同源,否则跳转到Step3;
Step10 根据判别得到的各个脉冲序列两两之间的同源关系,将属于同源的脉冲序列归并为一部雷达信号,对于非同源脉冲序号则判别为属于不同雷达的同型雷达信号输出。
3 仿真验证结果
下面对本文提出方法的进行仿真验证。
仿真信号源为2部PRI固定为1 999μs的同型雷达信号,侦察接收机的TOA量化精度为5μs,暂不考虑系统的测量误差。
假定第1部雷达连续发射了30个脉冲信号,侦察接收机只截获到了前10个和后10个脉冲信号,经过信号分选后输出2部雷达信号,分别对应2个脉冲序列的TOA如下所示(单位μs):

式中2 000μs是首脉冲到达时间。
第2部雷达发射了10个脉冲信号,且全部被侦察接收机截获,经过信号分选后输出一部雷达信号,对应的脉冲序列TOA如下所示(单位μs):

式中100 000μs是首脉冲到达时间。
3个脉冲序列经过量化处理后的数值如下:

采用文献[5]提出的算法分别估计脉冲序列(11)、(12)以及(13)的PRI并计算平均值,得到精确的PRI数值为1 999/5。
采用本文提出的同源判别方法分别计算3个脉冲序列两两之间的同源距离,结果如表1所示。

表1 同源距离计算结果
由于不考虑测量误差,故将同源距离判别门限设定为一个量化精度的大小,即5μs。根据表1的计算结果显示,脉冲序列(11)与(12)属于同源脉冲,即为一部雷达发射的脉冲序列,而脉冲序列(13)与脉冲序列(11)与(12)均不同源,其属于另一部同型雷达发射的脉冲序列。
从仿真验证得到的结果来看,与设定的2部同型雷达的场景是一致的。根据得到最终的判别结果,雷达信号合批方法可以将脉冲序列(11)与(12)归并为同一部雷达,而将脉冲序列(13)单独作为另一部特征参数相近的雷达。
4 结束语
本文提出了一种基于TOA的同型雷达同源判别方法,该方法通过计算2个特征参数相近的脉冲序列的同源距离,从而判别2个脉冲序列是否属于同一部雷达。该方法可以大幅降低雷达信号合批方法将多个同型雷达的雷达信号错误归并的概率,从而有效提升对敌方军事力量的准确判断。
猜你喜欢
——紫 苏
河南农业(2024年1期)2024-01-19 01:56:54
华人时刊(2023年1期)2023-03-14 06:43:36
汉字汉语研究(2021年2期)2021-08-30 08:58:46
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子学报(2016年12期)2017-01-10 07:15:25
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
河北书画研究(2016年3期)2016-04-28 08:55:35
中国石油大学学报(自然科学版)(2015年1期)2015-03-24 06:46:42
