“中、俄、芬、德”四国机器人技术联合体发展历程
2018-09-27 08:49冯石柱
机器人技术与应用 2018年4期
冯石柱
(中国北方车辆研究所,北京,100072)
编者按:
在民用上,无人驾驶如今最火热的是无人驾驶汽车,除却传统汽车企业,谷歌、百度等新兴高科技企业也在大举切入。在军事上,无人驾驶技术涉入最多的是星球车、地面无人系统等。从技术角度看,不论是民用还是军事,无人驾驶原理都是相通的。因此,军民技术融合没有阻扰。
中国北方车辆研究所(简称北方车辆所)隶属于中国兵器工业集团公司,在地面无人平台领域一直成绩不俗,为我国探月计划提供过月球车行走系统技术,是国内此领域的佼佼者。2013年,北方车辆所成功召开了“地面无人平台技术国际(中、俄、芬、德)研讨会”,邀请了来自俄罗斯、芬兰、德国专家对地面移动机器人的研究进展进行学术报告和交流。此后,北方车辆所与俄罗斯无人移动科学与技术公司、芬兰通用智能机器有限公司、德国移动技术有限公司3家单位开展了多项技术合作。2014年9月, 4家单位在俄罗斯圣彼得堡市签署协议,“中、俄、芬、德”四国机器人技术联合体(简称四国联合体)正式成立。
经过几年合作,四方发挥各自的技术优势,快速融合,形成了一股强大的技术力量,在机器人行业异军突起,引发各界关注。
本期专题报道栏目主要对四国联合体的发展历程、4家单位的优势技术以及取得的成果、四国联合体未来的发展规划进行详细介绍,以飨读者。
1 国际合作
自2005年始,中国北方车辆研究所(简称北方车辆所)开展了有关月球车、星球车行走系统技术等多项研究,并在国家有关部门的大力支持下,采取自主研发与技术合作结合的途径,在国际上与俄罗斯全俄运输车辆研究所(简称全俄所)、俄罗斯无人移动科学与技术公司等建立战略合作关系,共享月球车开发和实验资源,联合开展地面无人平台关键技术的研究。
1.1 自主引进月球车
2005年9月,北方车辆所引进全俄所生产的新型月球车行走系统—XMAL样机(见图1),该样机是当时全俄所最新研制、功能性能最为完善的模型产品,具有空间19个自由度的运动功能和超强的越障、行驶能力,为北方车辆所自主开展月球车行走技术研究奠定基础。

图1 月球车行走系统—XMAL样机
1.2 支援国家重点工程
为了支援我国“嫦娥工程”探月计划,2005年12月,北方车辆所与全俄所联合在北京举办了一场月球车行走系统展览,展示了5款月球车(星球车)模型和1款专用土壤探测设备,共吸引80余家单位观展。展览期间,进行月球车模型动态演示64场,专题项目汇报17次,全面展示、汇报了中俄双方近年来的合作成果。
此次展览得到国防科学技术工业委员会等上级机关的高度重视,以及中国航天科技集团五院、清华大学等研究机构、院校的极大关注,众多国家有关部委领导亲自观看了月球车动态演示,听取项目汇报,中国人民解放军总装备部、中国兵器工业集团公司的领导、专家等对项目发展做出相关指示。
1.3 助力国家星球探测计划
星球车是深空探测任务中不可或缺的重要环节。2004年,我国启动 “嫦娥工程”探月计划,到2016年已经成功开展3期,实现了“绕”和“落”的目标;预计到2020年前,中国研制的火星车也将整装待发,奔赴遥远的火星执行移动巡视考察任务。
北方车辆所紧密围绕我国星球探测计划和地面国防、安全、防暴、探测任务等需求,以建立健全我国星球车/地面小型无人平台研究、设计、实验/试验和评估体系,掌握国际前沿关键技术成果为目标,开展了星球车/地面小型无人平台技术合作项目研发,通过引进和吸收俄罗斯先进的星球车技术,突破星球车地面小型无人平台研制的瓶颈技术难题,形成了独特的星球车/地面小型无人平台研究方法、体系和核心技术群,为我国星球探测计划提供了重要的技术支撑。
在嫦娥工程玉兔号月球车项目中,北方车辆所作为该项目移动系统副主任设计师单位,与中国航天科技集团公司第八研究院、哈尔滨工业大学联合共同承担月球车移动系统构型设计任务,并牵头承担了月球车轮壤作用研究和车轮结构设计、低重力模拟月壤研制和月球车动力学、运动学建模三项任务。
北方车辆所通过开展国际项目合作,重点引进了模拟月球实验/试验环境、根据实验结果对月球车在月球上的移动性能分析评估2项关键技术,并成功应用在玉兔号月球车的研制中。图2所示为玉兔号月球车移动系统。
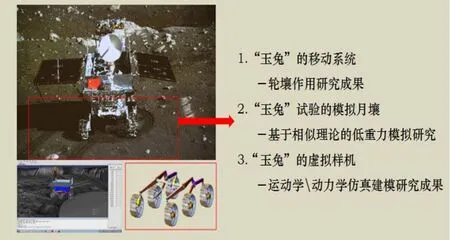
图2 玉兔号月球车移动系统
1.4 播下四国合作的种子
在中俄合作的《星球车(地面轻小型无人平台)技术引进与研发》项目研发过程中,俄罗斯无人移动科学与技术公司作为参研团队,表现出较强的研发能力。随着双方合作的深入,一些有关前沿技术问题的探讨还引起了芬兰通用智能机器有限公司、德国移动技术有限公司的兴趣。于是,四家单位通过项目合作,团队之间良好的沟通、交流,以及对科学探索的好奇、对科技力量的敬畏,大家有了共同合作研发的愿望,种下了四国合作的种子。
2 首届国际会议
在星球车研发项目成功引进的基础上,为了在地面无人平台领域获得更广阔的国际技术资源,北方车辆所与俄罗斯、芬兰、德国等国家技术领先的研发机构或知名专家进一步建立合作关系,促进无人平台技术和产品的快速提升。其中,召开国际会议成为提升无人平台技术和产品的重要举措之一。
2.1 研讨会成功举办
2013年10月28日-11月3日,首届“地面无人平台技术国际(中、俄、芬、德)研讨会”在北方车辆所成功召开,会议主要围绕地面移动机器人的研究进展作学术交流。中国兵器工业集团公司(以下简称集团公司)副总经理杨卓、集团公司科技部副主任沙天兵,中国兵器科学研究院副院长曹晖(现任北方车辆所所长)等上级机关领导以及来自俄罗斯、芬兰、德国的9名专家以及学者代表等60余名嘉宾出席会议。
北方车辆研究所时任所长王玉林在会上致辞,他指出,地面无人平台技术已成为当今世界最前沿、最活跃的领域之一,推动着先进制造、资源开发和科学探测技术发展,越来越受到各国政府和相关企业、科研院所的重视。我国幅员辽阔,有许多高温、高寒、荒漠地区需要地面无人平台去探索、开发,与此同时,高速的经济发展对交通运输、工业制造、农耕作业和抢险救灾提出了智能化、无人化的要求,地面无人平台技术拥有光明的应用前景。推进地面无人平台技术发展,需要了解、掌握世界地面无人平台技术发展现状和趋势,需要学习和借鉴国际同行的先进理念和方法,需要建立一个自由、包容、开放的技术交流与合作平台。相信通过相互交流、相互学习,碰撞思想、启发智慧,会议一定会取得丰硕学术成果,推动地面无人平台技术的快速发展。
俄罗斯无人移动科学技术公司总经理谢尔盖·马特洛索夫、圣彼得堡州立电信大学副校长奥列格·佐洛托克雷凌、芬兰通用智能机器有限公司主任阿尔纳·哈尔姆、德国移动技术有限公司总裁厄尔文·普雷斯勒教授等专家分别做大会发言。他们表示,此次研讨会为各国无人平台技术专家沟通交流搭建了平台,在这里集中了先进的技术、成功的经验和科学的方法,是一次共同研究探讨地面无人平台技术发展难得的机遇,将在世界无人平台技术领域产生非常重要的影响。各国的专家们将以包容的心态、创新的意识、合作的态度、吸纳消化会议的真知灼见,共同推动地面无人平台技术快速发展。
杨卓副总经理指出,无人化、智能化技术已成功应用于交通运输、科学考察和星际探索等领域,并日益展现出广阔的应用前景。但这些技术的发展仍然面临诸多挑战,需要开展广泛的国际交流与合作,集团公司非常支持开展此次研讨会,希望为四国交流合作搭建良好平台,共同促进地面无人平台技术发展。对于此次研讨会,他提出三点建议:一是以开放的思想研讨交流;二是高度重视前沿技术的开发应用;三是合作推进地面无人平台技术进展,以研讨会为契机充分交流、深度沟通、密切合作、共同努力,迎接地面无人平台技术发展的美好明天。
2.2 精彩报告内容
在这次大会上,中国、俄罗斯、芬兰、德国四国的11名专家就地面移动机器人的研究进展分别做了精彩演讲,具体内容包括地面无人平台总体研究、核心软件编程、主要部件设计、工程仿真手段、应用前景探索等,这些极具深度的内容和前沿技术为无人平台的发展指明方向,也推动着地面无人平台技术快速发展。
芬兰通用智能机器有限公司高级研究员Jari Saarinen博士向大家详细介绍了使用正态分布变换(Normal Distribute Transform)进行环境三维重建,并通过视频展示了环境三维重建及在该环境下的定位结果,这种方法有助于解决三维环境建模时存在环境地图大、内存需求多、精度低等问题。
厄尔文·普雷斯勒教授是移动机器人系统的知名专家,他向与会者主要介绍了移动机械手在服务机器人领域的应用情况,比如,物流、调试、医疗保健和康复、农业、排雷和清除爆炸物等领域,并指出,机械手虽然已有重要应用,未来也有巨大发展潜力,但其在某些技术上仍存在不足,需要加强完善。他具体阐述了欧洲的BRICS(机器人的最佳实践)项目的研究成果,其中,BRICS已经在改善移动操作软件方面迈出了第一步,它通过引入模型驱动工程的概念,协调接口和可重构的软件库的设计来实现最佳实用原则。
普雷斯勒教授还指出,自主移动操纵系统的发展带来了各种特殊的挑战,包括机动性和操纵性等问题如何解决等。例如,这些系统通常是多自由度的,而传统上将机器人作为一个整体考虑的路径规划方法已不再适用,基于采样的路径规划算法作为随机算法被认为是最先进的,因为它可以处理高维状态空间,并在机械手工作的许多真实场景中非常有效。
来自俄罗斯的多名专家也做了十分精彩的报告,他们主要对星球车和地面机器人高移动性行走系统(RHMLS)的研究情况进行阐述,提出典型的系统/任务要求、主要任务和RHMLS的功能;论述基本运动的原理及其设计内容,解释现代RHMLS的重点和关键技术,例如包括:车载机械臂的主要任务和功能,车载机械手基本配置内容,现代车载机械手的关键技术等;其他介绍包括机器人领域的无线通信解决方案,展示机器人采用无线网络、无线通信的位置跟踪系统,关注现代机器人智能电子系统,其将立体和视觉系统、燃料电池电源装置及人工智能引入到机器人系统中。
2.3 国际领先水平
参加此次会议的专家们都在各自从事的领域里取得了骄人成绩。其中,阿尔纳·哈尔姆教授是阿尔托大学名誉教授,自2008年起担任芬兰通用智能机器有限公司主任,从事的领域涉及基础和高级层面的自动化科技、控制工程和系统理论等。他主持了30多个由TEKES(芬兰国家技术创新局)、芬兰科学院等支持的研究项目,并取得丰硕成果。他所设计的智能机器人WorkPartner在国际上影响力巨大,并因此获得了IMECO奖和工业机器人创新奖(2003)。
厄尔文·普雷斯勒教授曾担任IEEE 机器人与自动化社团会议活动委员会成员、奖项提名委员会成员、欧洲机器人研究网络关键领域副主席、德国机器人协会创始会员等;曾获IEEE/IFR 发明和企业家奖、 IEEE 机器人与自动化最佳学生会议论文奖以及Inaba 创新技术奖等。
乌拉基米尔博士是来自圣彼得堡州立通讯学院的专家,该学院有专门从事通信研究的团队,他们在多信号传输的无线系统搭建、无线通信的新技术、无线组网技术、多传感器集成的观察装置等方面十分擅长。
假设攻击节点j在前55个信任评价周期内表现为正常节点,在56到115信任周期内表现为恶意节点,以0.7~1.0的几率展开选择性转发与发送虚假监测数据。从116信任周期开始停止攻击,又表现为正常节点,j的信任变化曲线如图5所示。
阿利克斯·波盖切夫作为俄罗斯无人移动科学与技术公司总工程师,曾参与了切尔诺贝利机器人、法国国家太空研究中心行星探测器底盘展示样机、火星车底盘概念机、反恐遥操作移动机器人等众多项目的设计与研发,在底盘设计方面很有造诣。
2.4 收获
通过召开此次研讨会,北方车辆所了解了国外地面无人平台重点技术相关研究领域的现状,国际专家对未来地面无人平台的发展预测、对多项核心技术解决方式的探究,增长了相关理论知识,开阔研究思路,特别是在无人平台领域部分重点问题的研究方式方法、解决思路上,获得一定的启发和可借鉴经验,有助于推动无人平台水平上一个新台阶。
具体收获包括:
1)关键技术需要大力研发。
无人平台的关键技术包括感知、理解、规划与决策等。北方车辆所从底层的源代码着手,加强关键技术的研发,争当行业领先、具有竞争力的机构。
2)专业精神值得学习。
通过在国际会议期间,与德国、芬兰专家的深入交流,感受到他们的钻研精神,以及对待问题严谨求实的态度,这些都值得国内同行借鉴学习。
3)先进技术需要引进。
通过与专家的深入交流、沟通,笔者看到了真正的差距,特别是在三维建模、自主规划等先进技术方面,通过引进先进可以迅速提升我国在地面无人系统方面的实力。
4)加强国际性研讨与合作。
召开研讨会成为获取世界上先进技术的一条新渠道。通过此次会议交流,笔者发现无人平台的技术群非常庞大,而且层出不穷的新技术也为无人平台的发展带来了无限可能。因此,北方车辆所积极开展广泛的国际合作,寻求发展新模式,争取快速占取行业领先地位。
3 四国联合体成立
在首届“地面无人平台技术国际(中、俄、芬、德)研讨会”成功举办的基础上,在与会专家倡议下,北方车辆所与俄罗斯无人移动科学与技术公司、芬兰通用智能机器有限公司、德国移动技术有限公司签订了技术合作协议,在集成高科技机器人技术、动态环境3D建模技术、自主定位和路径规划技术等方面展开合作,并积极开拓市场,形成了四国联合体的雏形。

图3 四家单位签订技术合作协议
2014年9月,上述4家单位在俄罗斯圣彼得堡市签署协议,“中、俄、芬、德”四国机器人技术联合体(简称四国联合体)正式成立。
4 四国联合体构成
四国联合体由来自中国、俄罗斯、芬兰、德国的四家成员单位构成。

兵器地面无人平台研发中心

UVC,Unmanned Vehicle Research Center

俄罗斯无人移动科学与技术公司

RCL,Russian Innovate Science & Technology Rover Company Ltd

芬兰通用智能机器有限公司

Generic Intelligent Machines,Ltd

德国移动技术有限公司

LOC,Locomotec GmbH
其中,RCL及其合作单位在空间机构及机器人底盘设计方面实力雄厚,曾为亚洲、欧洲、美洲等地区的国家设计出多款机器人,并已投入使用。
GIM和阿尔托大学在机器人目标识别与跟踪、三维环境感知模型建立、感知规划和自主导航领域具有国际先进水平。
LOC在机器人智能控制领域、三维环境感知模型建立等方面具有明显优势,可以实现自主控制系统及机械臂控制系统的开发。
5 四国联合体重要事件
四国联合体成立后,启动了服务型安保机器人iPartner项目,并于2015年4月,在西安市召开第三次工作会,共同签署了《CRFG 2015-2020合作需求论证计划》,确定未来6年在安保机器人、核工业机器人、矿业机器人、林业机器人、购物机器人、物流机器人、空间机器人等7大领域开展联合研发。
2016年11月,四国联合体在北京召开第四次工作会,研讨iPartner项目的进展情况,重点讨论了项目组在研发过程中遇到的技术问题,并签署了会议备忘录。
2017年9月,四国联合体在圣彼得堡市召开了第五次工作会,讨论了在“智慧城市、智慧生活”大背景下四国联合体的重点发展技术领域,以求尽快具备研制与市场需求相契合的机器人产品技术能力,建立技术优势,形成竞争优势。
2018年初,四国联合体圆满完成iPartner项目,并通过国家科技部项目验收;同年4月,四国联合体在广东省中山市召开了第六次工作会和2018国际机器人技术研讨会,总结了四国联合体的工作经验,实地考察了中山市和佛山市高新技术开发区的情况,了解当地的加工制造企业以及与机器人相关企业的情况,并就如何产业化进行内部讨论。
6 2018四国联合体会议
2018年4月23-25日,由北方车辆所和广东省中山市科技局联合主办的2018“中、俄、芬、德”(CRFG联合体)国际机器人技术研讨会在中山市举行。此次研讨会以“让智慧、安全的机器人走进生活”为主题,研讨国际机器人前沿技术发展情况,交流机器人高适应性移动系统构型、机器人总体控制、复杂环境综合感知、机器人行为自主规划、危险目标分类识别、机器人行为自主安全控制等关键技术,讨论国际合作的方向和方法,寻求提升我国机器人项目研发和产业化应用水平的途径。
4月23日,在四国联合体第六次工作会上,与会专家对四国联合体首个国际联合研究项目——iPartner安保机器人项目进行总结回顾,对iPartner在移动、感知、规划、危险目标识别等关键核心技术领域取得的成果表示满意,对进一步提升功能性能和更好适应产业化要求提出意见和建议。专家们一致认为,目前的安保机器人技术成果已具备产业化条件,应着力推进安保机器人系列化发展。同时,四国联合体签署了下一步发展协议,就感知、规划、危险目标识别、轻量化操作臂等关键技术在安保机器人、探测机器人、救援机器人、农业机器人、灾后检查机器人等五大领域开展联合研发。
4月25日,“中、俄、芬、德”国际机器人技术研讨会正式召开,集团公司副总经理贾宏谦、广东省科技厅副厅长李旭东等领导出席会议并致辞。
贾宏谦副总经理对四国联合体前期取得的工作成果表示肯定,并提出三点建议:一要坚持把四国联合体打造成世界机器人创新发展的领军者,二要坚持务实推进机器人产业化战略落地,三要坚持以开放的思想研讨交流,相互启迪借鉴,形成丰硕成果。
中山市副市长徐小莉介绍了中山市产业发展优势,中山市作为珠三角乃至全国重要的制造业城市,全市拥有38个国家级产业基地、18个省级专业镇、18项产业集群联盟标准,387家省级以上创新平台,有装备制造、电子信息、家用电器等3个千亿级产业集群,在发展智能制造、机器人产业方面拥有得天独厚的优势。

图4 2018四国联合体研讨会现场
北方车辆所所长曹晖详细介绍了四国联合体自2014年成立以来取得的丰硕成果:一是圆满完成新型安保机器人样机的研制,初步具备产业化条件;二是突破无人平台开放式总体控制体系架构、基于复杂环境的作业自主控制等7项机器人领域关键技术,成功引进2 名千人计划海外专家;三是催生出全地形机器人、载人月球车、宴会机器人等6个国际合作领域产品;四是加速了安保机器人、服务机器人、巡检机器人、观光机器人等10余个具有典型军民融合特点机器人项目的立项研究,形成一批具备产业化条件的技术成果,被中国科技部列入国际合作示范工程。
此次会议的成功举行,为四国联合体研制产品落地打开了新思路,与地方政府和企业共建“军民融合”科技成果转化平台,即符合国家大政方针,也促进联合体持续发展。
猜你喜欢
小哥白尼(趣味科学)(2022年5期)2022-08-15
小哥白尼(趣味科学)(2022年3期)2022-06-09
小哥白尼(趣味科学)(2022年2期)2022-05-25
小哥白尼(趣味科学)(2022年1期)2022-04-26
建材发展导向(2020年16期)2020-09-25
百科知识(2019年5期)2019-03-18
中国工程咨询(2017年1期)2017-01-31
太空探索(2016年9期)2016-07-12
中学科技(2015年7期)2015-07-03
中医研究(2014年4期)2014-03-11