三支决策空间上三支决策评价函数的构造
2018-09-05 01:59胡宝清
西北大学学报(自然科学版) 2018年4期
胡宝清
(武汉大学 数学与统计学院, 湖北 武汉 430072)
三支决策理论由姚一豫教授提出[1-3],其基本思想来自Pawlak粗糙集[4]和概率粗糙集[5-7], 基本目的是将粗糙集的正域、负域和边界域分别解释为一个三元分类的三个决策结果,也即,接受、拒绝和不确定(或延迟决策)。 本文系统研究了各类粗糙集和概率粗糙集,从三支决策的决策度量、决策条件和决策评价函数三个关键问题出发,引入了决策评价函数的公理化定义并建立了三支决策空间[8]。 基于这一思想,笔者给出了三支决策空间上的各类三支决策,使得存在的三支决策成为三支决策空间的一些特例,例如,基于模糊集[9]、区间值模糊集[10]、区间集[11]、阴影集[12]、随机集[13]和粗糙集的三支决策等。
三支决策空间理论引入之后,从下列几个方面进行了推广研究。
1) 代数结构: 从具有否定算子的完全分配格到具有否定算子的偏序集[14-15], 这样基于二型模糊集[16-17]、区间值二型模糊集[17-18]、犹豫集和区间犹豫集的三支决策[14]也包含在三支决策空间中。
2) 决策评价函数的构造:从半决策评价函数到决策评价函数[19-20]、从多个决策评价函数到决策评价函数[21]的构造方法。
本文对现有的决策评价函数的构造方法进行综述, 并在此基础上给出新的构造方法。
1 三支决策空间的基础知识
如果(X,≤)是一个偏序集, 映射N:X→X称为强否定算子或逆序对合算子, 如果它满足∀x,y∈X,
1)x≤y⟹N(y)≤N(x) (逆序);
2)N(N(x))=x(对合律)。
算子c(xc=1-x)是[0,1]上的一个强否定算子。
在本文中, 我们总假设(P,≤P)是一个具有强否定算子NP的偏序集, 并具有最小元0P和最大元1P,一般被记为(P,≤P,NP,0P,1P)。 本文还使用下列记号:
I(2)={[a-,a+]|0≤a-≤a+≤1},
I2={(a,b)|a,b∈[0,1],a+b≤1},

假设X和Y是两个论域,Map(X,Y)是X到Y的映射集, 即Map(X,Y)={f|f:X→Y}。 特别地,有以下定义:
1)A∈Map(X,[0,1])是X上的一个模糊集。
2)A∈Map(X,I(2))是X上的一个区间值模糊集。一个区间值模糊集A用A=[A-,A+]表示。
3)A∈Map(X,I2)是X上的一个直觉模糊集。
4)H∈Map(X,2[0,1]-∅)是X上的一个犹豫模糊集。
5)H∈Map(X,2I(2)-∅)是X上的一个区间值犹豫模糊集。
6)A∈Map(X,Map([0,1],[0,1])是X上的一个二型模糊集。
7)R∈Map(X×Y,[0,1])是X到Y的一个模糊关系。
对于A∈Map(U,P),A在U中的截集定义为
Aλ={x∈U|A(x)≥Pλ},λ∈P。
补集定义为
NP(A)(x)=NP(A(x))。
如果A,B∈Map(U,P), 则A⊆PB被定义为A(x)≤PB(x), ∀x∈U。 Map(U,P)中的两个特殊元素 ∅(x)=0p(∀x∈U)和U(x)=1p(∀x∈U), 分别记为(0p)U和(1p)U。
假设(PC,≤PC,NPC,0PC,1PC)和(PD,≤PD,NPD,0PD,1PD)是两个偏序集,U是决策论域,V是条件论域。 我们有下面的决策评价函数的公理化定义。
定义1[14]映射
E:Map(V,PC)→Map(U,PD)
称为U上的一个决策评价函数,如果它满足下列公理:
(E1) 最小元公理 (minimum element axiom)
E(∅)=∅,即E(∅)(x)=0PD,∀x∈U。
(E2) 单调性公理 (monotonicity axiom)
A⊆PCB⟹E(A)⊆PDE(B),∀A,B∈Map(V,PC),即E(A)(x)≤PDE(B)(x),∀x∈U。
(E3) 补公理 (complement axiom)
NPD(E(A))=E(NPC(A)),∀A∈Map(V,PC),即NPD(E(A))(x)=E(NPC(A))(x),∀x∈U。
从公理(E1)和公理(E3)可以得到
E(V)(x)=1PD,∀x∈U。
基于决策评价函数的定义, 我们给出了基于偏序集的三支决策空间。
定义2[14]给定决策论域U,决策条件论域Map(V,PC), 决策度量论域PD和决策评价函数E, 称(U,Map(V,PC),PD,E)为基于偏序集的三支决策空间。
2 基于半三支决策评价函数的三支决策评价函数构造
在粗糙集的推广研究中发现,当等价关系推广到一般模糊关系时, 决策评价函数不一定满足第三条公理。 例如, 如果A是有限论域U上的一个模糊集或R是U上的一个模糊关系, 则
不一定满足补公理。 这样限制了三支决策理论的推广应用。 为了解决这个问题, 我们引入了半决策评价函数和半三支决策空间的概念, 并成功得到了从半决策评价函数构造决策评价函数的方法。
定义3[19]映射
E:Map(V,PC)→Map(U,PD)
称为U上的一个半决策评价函数, 如果它满足最小元公理(E1)和单调性公理(E2)。 同时称(U,Map(V,PC),PD,E)为一个基于偏序集的半三支决策空间。
下面给出PD=[0,1]时的决策评价函数的构造方法。
定理1[19]给定U上的一个半决策评价函数
E:Map(V,PC)→Map(U,[0,1]),
并且E((1PC)V)=1U。 如果α,β∈[0,1]并且α+β=1, 则
E*(A)(x)=αE(A)(x)+
β(1-E(NPC(A))(x))
是U上的一个半决策评价函数。
定理2[19]给定U上的一个半决策评价函数
E:Map(V,PC)→Map(U,[0,1]),
并且E((1PC)V)=1U。,则
E*(A)(x)=
是U上的一个决策评价函数。
下面给出了PD=I(2)时的决策评价函数的构造方法。
定理3[19]设映射
E:Map(V,PC)→Map(U,I(2))
并且
E(A)(x)=[(E(A))-(x),(E(A))+(x)],
则E(A)是U上的一个半决策评价函数当且仅当(E(A))-:Map(V,PC)→Map(U,[0,1])和(E(A))+:Map(V,PC)→Map(U,[0,1])都是U上的一个半决策评价函数。
定理4[19]设映射
E:Map(V,PC)→Map(U,I(2))
是U上的一个半决策评价函数,
E(A)(x)=[(E(A))-(x),(E(A))+(x)]
E*(A)(x)=
是U上的一个决策评价函数。
下面给出PD=I2时的决策评价函数的构造方法。
定理5[19]设映射
E:Map(V,PC)→Map(U,I2)
并且
E(A)(x)=(Eμ(A)(x),Eν(A)(x))。
则E(A)是U上的一个半决策函数当且仅当
Eμ,(Eν)c:Map(V,PC)→Map(U,[0,1])
是U上的一个半决策评价函数。 如果E((1PC)V)=1I2=(1,0),则
E*(A)(x)=
是U上的一个决策评价函数。
文献[19]给出了大量的从半决策评价函数到决策评价函数的构造例子,这些例子来自于不同的评价条件,如模糊集、区间值模糊集、直觉模糊集、随机集、犹豫模糊集和区间值犹豫模糊集和二型模糊集。 具有代表性的函数列入表1供读者研究参考。
3 基于t-模和t-余模的三支决策评价函数构造
在[0,1]上考虑t-模T和t-余模S可以构造出更丰富的决策评价函数。
定理6[19]给定U上的一个半决策评价函数
E:Map(V,PC)→Map(U,[0,1]),
并且E((1PC)V)=1U。 则
1-E(NPC(A))(x))+S(E(A)(x),
1-E(NPC(A))(x))}
是U上的一个决策评价函数, 其中T和S是[0,1]上的对偶t-模和t-余模。
当T=min,S=max, 定理6就是定理2。
在定理6中取E(A)=A,PC=[0,1],NPC(x)=1-x, 则得到文献[20]的结论:
E*(A)(x)=
是U上的一个决策评价函数。
定理7[20]设映射
E1,E2:Map(V,PC)→Map(U,[0,1])
是U上的两个半决策评价函数,并且对所有A∈Map(V,PC),x∈U,定义
ET(A)(x)=T(E1(A)(x),E2(A)(x)),
ES(A)(x)=S(E1(A)(x),E2(A)(x)),
E(T,S,a)(A)(x)=aET(A)(x)+
(1-a)ES(A)(x),0≤a≤1,
则ET,ES和E(T,S,a)都是U上的半决策评价函数。
定理8[20]设
E:Map(V,PC)→Map(U,[0,1])
是U上的一个半决策评价函数。 则
E(T,NPC)(A)(x)=
T(E(A)(x),1-E(NPC(A)(x))),
E(S,NPC)(A)(x)=
S(E(A)(x),1-E(NPC(A)(x)))
都是U上的半决策评价函数。
文献[20]从不同的评价条件,如模糊集、区间值模糊集、犹豫模糊集等, 基于常见的模糊逻辑连接词t-模和t-余模给出了大量的从半决策评价函数到决策评价函数的构造例子。
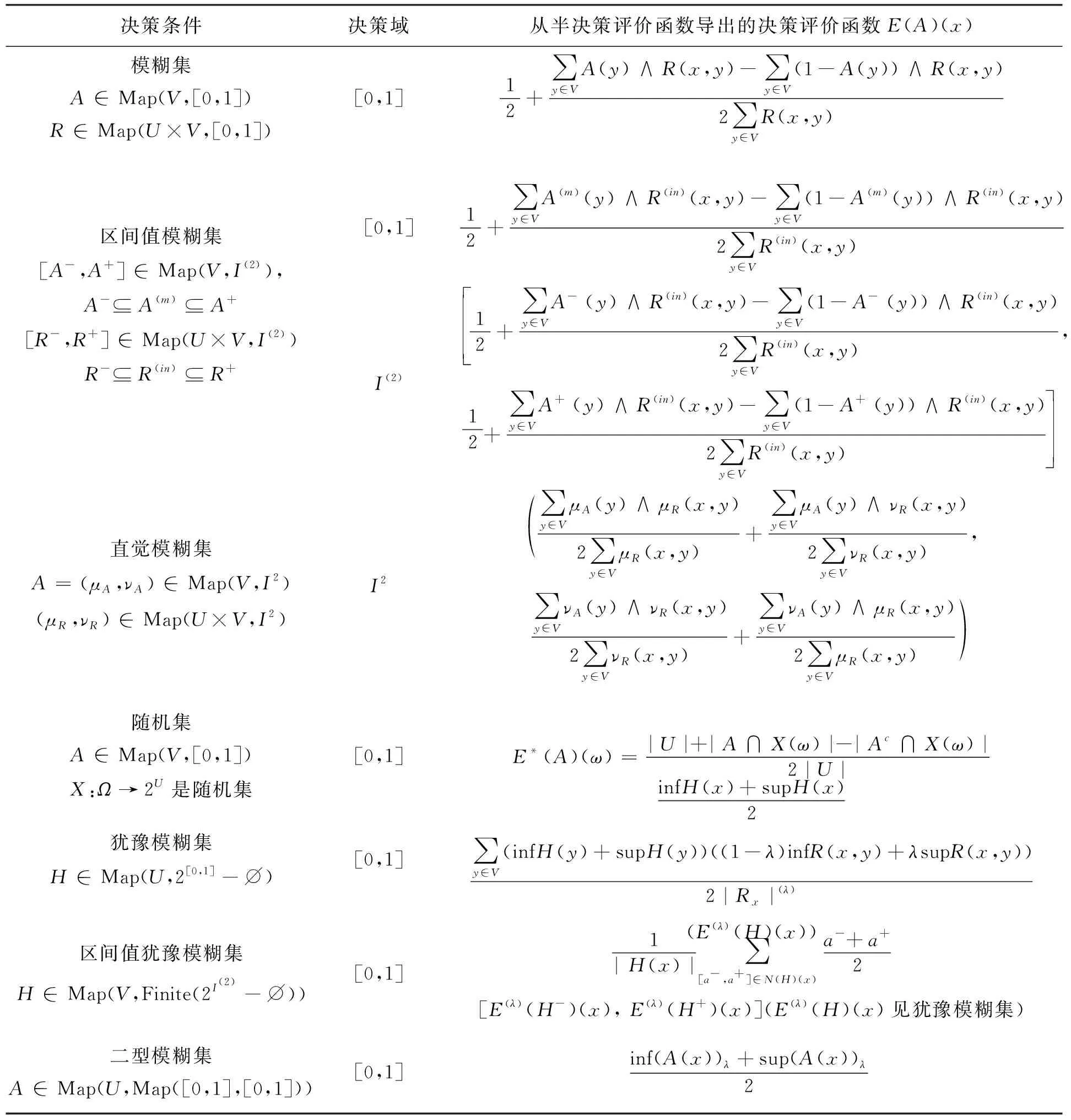
表1 在各类决策条件下从半决策评价函数导出的决策评价函数
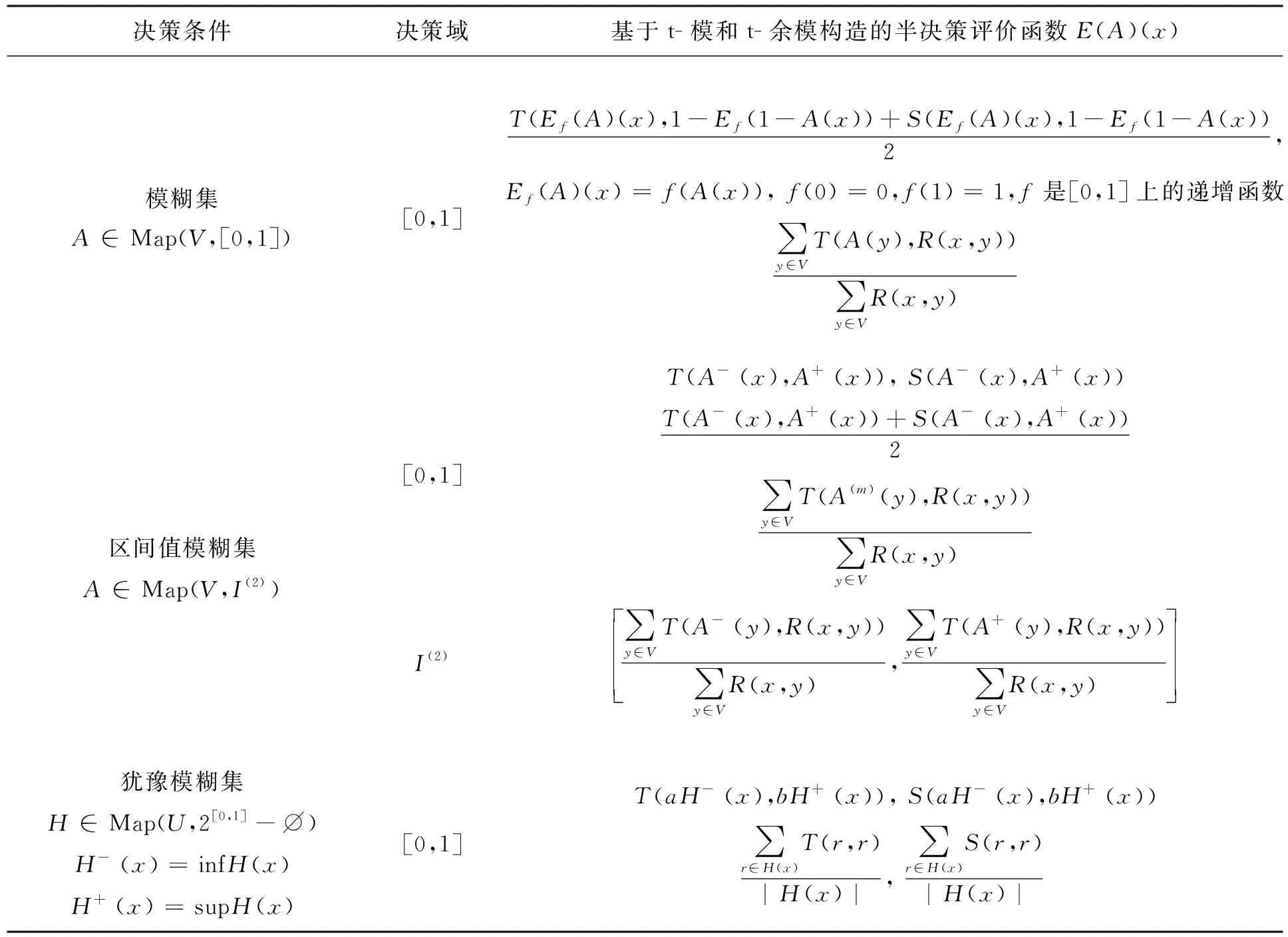
表2 在各类决策条件下基于t-模和t-余模的决策评价函数Tab.2 Three-way decision evaluation functions based on t-norm and t-conorm under various decision conditions
4 基于多个三支决策评价函数的三支决策函数构造
设
Ei:Map(V,PC)→Map(U,[0,1]) (i=1, 2, …,n)
为了给出多个函数的聚合方法,先给出保补聚合函数的概念。
定义4[21]设(P,≤P,NP,0P,1P)是一个有界偏序集, 则映射f:Pn→P称为一个n元保补聚合函数, 如果它满足下列条件
(AF1) 正则性:
f(x,x,…,x)=x, ∀x∈P;
(AF2) 递增性:


(AF3) 保补性:
f(NP(x1),NP(x2),…,NP(xn))=
NP(f(x1,x2,…,xn)),∀xi∈P。
记P上所有n元保补聚合函数, 记为AFn(P)。
以下考虑多个决策评价函数的聚合。
定理9[21]设映射
Ei:Map(V,PC)→Map(U,PD)(i=1, 2, …,n)是U上的n个决策评价函数,f∈AFn(PD)并且对所有A∈Map(V,PC)和x∈U,
Ef(A)(x)=
f(E1(A)(x),E2(A)(x),…,En(A)(x)),
则(U,Map(V,PC),PD,Ef)是U上的一个三支决策评价函数。
下面是一些对PD=[0,1]的聚合三支决策评价函数的例子。



4)Eme(A)(x)=Median{Ei(A)(x)}, 其中Median是中位数。
5 决策评价函数新构造方法
在前面构造方法的启发下, 下面给出新的构造方法。 因决策评价函数可由定理2通过半决策评价函数构造得到, 所以下面只给出半决策评价函数的构造。
定理10设A∈Map(V,[0,1]),R∈Map(U×V,[0,1]), 定义映射
E:Map(V,[0,1])→Map(U,[0,1]),
则E是U上的一个半决策评价函数并且E(1V)=1U。
证明显然满足最小元公理和单调性公理。 对所有x∈U,
E(1V)(x)=
定理11设A∈Map(V,[0,1]),R∈Map(U×V,[0,1]), 定义映射
E:Map(V,[0,1])→Map(U,[0,1])
S(A(y),R(x,y)))
则E是U上的一个半决策评价函数,并且E(1V)=1U。
证明显然满足最小元公理和单调性公理。 对所有x∈U,
E(1V)(x)=
例1在定理10和定理11中, 如果考虑S=∨,T=∧, 则
这其实是模糊集A的相对基数。 由定理2得到决策评价函数
例2在定理10中, 如果考虑
S(x,y)=(x+y)∧1,
T(x,y)=(x+y-1)∨0,
则
E(A)(x)=
(A(y)+R(x,y)-1)∨0)∧1。
由定理2得到决策评价函数

(R(x,y)-A(y))∨0)∧1]}。
取
U=V={x1,x2,x3,x4,x5},
则
定理10和定理11的结论可推广到其他决策条件上。
定理12设A∈Map(V,I(2)),R∈Map(U×V,I(2)), 定义映射
E1,E2:Map(V,I(2))→Map(U,[0,1]),
E1(A)(x)=
y))),
E2(A)(x)=
y)))

定理13设A∈Map(V,I(2)),R∈Map(U×V,I(2)), 定义映射
E1,E2:Map(V,I(2))→Map(U,I(2)),
E1(A)(x)=
E2(A)(x)=

6 结 语
本文讨论的是三支决策空间理论中一个很重要的结论,可以从只满足公理(E1)和(E2)的函数出发构造满足公理(E1),(E2)和(E3)的函数。 首先, 从不同角度回顾了一系列构造方法。 其次, 基于论域的基数给出了决策评价函数新的构造方法。
关于三支决策的构造还可以从以下几个方面进行考虑:
1) 将强否定算子放宽到否定算子上,即去掉对合律,这样使用更加广泛。
2) 基于一致模和零模等推广模的决策评价函数构造。
3) 半决策评价函数到决策评价函数主要是在[0,1]或I(2)上, 能否在偏序集上直接从半决策评价函数构造出决策评价函数?
猜你喜欢
湖南文理学院学报(自然科学版)(2022年4期)2022-10-13
北京航空航天大学学报(2022年5期)2022-06-06
环境工程技术学报(2022年3期)2022-06-05
现代职业教育·职业培训(2019年6期)2019-10-09
天津师范大学学报(自然科学版)(2018年4期)2018-09-11
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
哲学分析(2017年2期)2017-05-02
浙江大学学报(理学版)(2016年5期)2016-09-16
中学生数理化·七年级数学人教版(2016年5期)2016-05-14
美与时代·城市版(2014年9期)2014-10-29