
基于iGMAS的BDS空间信号精度性能评估*
2018-09-03 09:53陈国通张晓旭邵士凯王小娜
通信技术 2018年8期
张 璞,陈国通,张晓旭,邵士凯,郝 菁,王小娜
(1.河北科技大学,河北 石家庄 050018;2.卫星导航与装备技术国家重点实验室,河北 石家庄 050000;3.中国电子科技集团公司第五十四研究所,河北 石家庄 050000)
0 引 言
国际全球连续监测评估系统(international GNSS Monitoring & Assessment System,iGMAS)的基本功能是数据监测采集、传输、贮存、分析与信息发布,建设目的主要是为用户提供安全可靠的全球卫星导航系统(Global Navigation Satellite System,GNSS)服务[1]。iGMAS对外地址为http∶//124.205.50.178,用户可免费下载多系统高精度轨道、钟差等产品[2]。作为全球四大卫星导航系统之一,北斗卫星导航系统(Bei Dou navigation satellite System,BDS)已经进入全球化建设阶段,将面临GPS、GLONASS、Galileo等诸多导航系统的竞争,而卫星导航系统的性能成为竞争的关键因素[3-5]。空间信号(Signal In Space,SIS)精度是评价卫星导航系统服务性能的关键指标,主要通过卫星的用户测距误差(User Range Error,URE)、用户测速误差(User Range Rate Error,URRE)和用户加速度误差(User Range Acceleration Error,URAE)表示[6]。以上误差项仅包含预报轨道误差、预报钟差、群延迟误差(Tgd)和导航系统时间等。这部分误差主要来自地面部分(数据拟合误差、预报模型误差等)和空间部分(卫星受摄运动的不确定性等)[7]。
空间信号性能的好坏是影响导航定位精度的关键因素之一。导航系统中,URE是导航卫星位置与钟差的实际值和利用预报导航星历得到的预测差值,可在一定程度上呈现预报的导航星历和钟差精度,同时还决定着用户的实时导航定位精度。目前,北斗所有卫星的URE均值为2.2 m(95%置信度):静止轨道卫星(Geostationary Earth Orbit,GEO)的URE优于1.7 m(95%置信度);倾斜地球同步轨道卫星(Inclined Geosynchronous Satellite Orbit,IGSO)的URE优于3.8 m(95%置信度);中圆轨道卫星(Medium Earth Orbit,MEO)的URE优于2.2 m(95%置信度)。北斗所有卫星的URRE优于2.0 mm/s(95%置信度);URAE优于0.025 mm/s2(95%置信度)[8]。空间信号误差对导航系统的建设和维护有重要作用。对于空间信号误差的估计与分布特性,国内外已有学者进行了大量研究[9]。本文依托中国电子科技集团公司第五十四研究所的iGMAS监测评估中心,获取了卫星的精密星历文件与广播星历,评估和分析北斗在轨卫星空间信号精度。
1 钟差数据来源
我国的iGMAS平台所出的RINEX星历文件使用北斗时间系统命名,包含23个接收站的数据。接收站名分别由我国国内8个站(chu1、xia1、gua1、bjf1、wuh1、lha1、sha1、kun1)和国外15个站(abja、brch、byns、canb、clgy、cnyr、dwin、hmns、icuk、kndy、lpgs、peth、rdjn、that、zhon) 构 成。星历文件命名通用格式为ssssdddf.yyt,其中ssss为四字符测站名;ddd为第一个观测值记录的年内天;f为一天内的文件序号,其中天文件f=0,小时文件f=a,第一小时00h-01h;f=b,第二小时01h-02h;…f=x,第24小时23h-24h。yy为年的后两位数字;t为文件类型:N为GPS导航信息文件,G为GLONASS导航信息文件,L为Galileo导航信息文件,R为BeiDou导航信息文件。
BeiDou导航文件的数据部分自左向右依次为:第一行,卫星系统(C),卫星号(PRN),历元,Toc卫星钟参考时(BDT),年(4位数),月,日,时,分,秒,SV clock bias(seconds),SV clock drift(sec/sec),SV clock drift rate(sec/sec2);第二行,IODE Issue of Data,Ephemeris,Crs(meters),Delta n(radians/sec),M0(radians);第三行,Cuc(radians),e Eccentricity,Cus(radians),sqrt(A)(sqrt(m)));第四行,Toe星历时间(BDT),Cic(radians),OMEGA0(radians),Cis(radians);第五行,i0(radians),Crc(meters),omega(radians),OMEGA DOT(radians/sec);第六行,IDOT(radians/sec),保留,BDT Week#,保留;第七行,SV accuracy(meters),SatH1,TGD1 B1/B3(seconds),TGD2 B2/B3(seconds);第八行,信息的发射时间(BDT的周内秒),IODC时钟数据龄期-保留,保留。数据格式如图1所示。

图1 广播星历历元数据
精密星历为全星座星历文件,命名格式为此次使用的数据cgswwwwd.sp3。其中,cgs表示iGMAS的数据中心下载的精密星历数据;wwww表示GPS周,d表示周几,其中0表示周日,周一表示1,以此类推,周六表示为6。其中,时间部分在数据开始部分显示,表示在这个时间点的星历数据,4-31表示年、月、日、时、分、秒。下一行2-4表示系统与卫星号,5-18表示为X坐标,19-32表示为Y坐标,33-46表示为Z坐标,47-60表示钟差信息,64-65表示X的精度参数,67-68表示Y的精度参数,70-71表示Z的精度参数,73-75表示钟差精度参数。
2 空间信号精度评估方法
空间信号精度在一定程度上决定了导航定位授时的性能,主要包括用户测距误差、用户测速误差和用户加速度误差三部分。
2.1 URE计算公式
空间信号测距误差SISRE是一个评估星历精度的综合指标,反映的是计算的卫星位置和钟差与真值之差在视线方向上的综合影响。对于GPS系统来说,因为轨道和钟差是一起计算的,所以其轨道的径向误差和钟差是负相关的[10]。但是,BDS广播钟差是采用星地双向时间比对方法得到的,其径向和钟差的相关性很弱,所以北斗的SISRE计算公式与GPS略有不同[7,11]。北斗的SISURE计算公式为:

其中,S1表示R方向的影响因子,S2表示T方向与N方向的影响因子,c表示光速,T1表示钟差误差。
2.2 URRE计算公式
考虑到差分法计算时釆样时间间隔应尽可能小,计算时需要以相同采样间隔的精密钟差和轨道作为参考值。例如,采用秒的数据计算,则需要观测数据进行精密定轨,然后计算得到的精密钟差和精密轨道,而不能用精密轨道和钟差数据进行线性内插,原因是内插的精密钟差不能体现原子钟的抖动[12]。因此,本次实验使用拉格朗日插值定理,计算得到每秒钟的瞬时URE,然后计算得到URRE。
当Δt=ti+1-ti间隔很小,如Δt=1 s时,有:

由式(2)差分形式近似得到URRE:

其中,IURE表示瞬时URE。
2.3 URAE计算公式
使用差分法计算URAE时,采样时间间隔应尽可能小,因为过大容易造成得到的精度偏高。所以,
本次实验使用拉格朗日插值定理,差值间隔为1 s,然后计算得到URAE:

按定义,当Δt=ti+1-ti间隔很小,如Δt=1 s时,可用式(4)的差分形式近似得到URAE:

其中IURRE为瞬时用户测速误差,IURE为用户测距误差。
3 试验与分析
北斗系统中,GEO包括C01、C02、C03、C04、C05,IGSO 包 括 C06、C07、C08、C09、C10、C13,MEO包括C11、C12、C14。此次实验抽取了 GEO的 C04、IGSO的 C08和 MEO的 C14,采用2018年2月25日的星历数据,通过URE、URRE、URAE三个方面评估空间信号精度。
3.1 用户测距误差
对用户测距误差的评估如图2、图3所示,其中GEO的用户测距误差为C04所示,IGSO的用户测距误差为C08所示,MEO的用户测距误差为C14所示。
国内数据在GEO中C04的用户测距误差90%收敛于±2 m;IGSO中C08的用户测距误差90%收敛于±1.5 m;MEO中C14的用户测距误差80%收敛于±1 m。其中,GEO一天的平均URE为1.768 m,IGSO一天的平均URE为1.157 m,MEO一天的平均URE为0.839 m。URE总体走势方面,三个轨道面均在0附近振荡,没有出现单调增加或减小。国际数据与国内数据收敛范围大致相同,其中GEO一天的平均URE为1.813 m,IGSO一天的平均URE为1.111 m,MEO一天的平均URE为0.811 m。而国内数据的精度偏差GEO为2.48%,IGSO为4.14%,MEO为3.45%。
3.2 用户测速误差
对用户测速误差的评估如图4、图5所示,其中GEO的用户加速度误差为C04所示,IGSO的用户加速度误差为C08所示,MEO的用户加速度误差为C14所示。

图2 国内URE(用户测距误差)

图3 国际URE(用户测距误差)

图4 国内URRE(用户测速误差)

图5 国际URRE(用户测速误差)
GEO中C04的用户测速误差90%收敛于±0.8 mm/s;IGSO中C08的用户测速误差90%收敛于±1.5 mm/s;MEO中C14的用户测速误差90%收敛于±1 mm/s;GEO一天的平均URRE为0.536 mm/s,IGSO一天的平均URRE为0.643 mm/s,MEO一天的平均URRE为0.565 mm/s。URRE的总体走势方面,三个轨道面均在0附近振荡,没有出现单调增加或减小。国际数据与国内数据收敛范围大致相同,其中GEO一天的平均URRE为0.534 mm/s,IGSO一天的平均URRE为0.585 mm/s,MEO一天的平均URRE为0.516 mm/s。而国内数据的精度偏差GEO为0.37%,IGSO为9.91%,MEO为9.50%。
3.3 用户加速度误差
对用户加速度误差的评估如图6、图7所示,其中GEO的用户加速度误差为C04所示,IGSO的用户加速度误差为C08所示,MEO的用户加速度误差为C14所示。
GEO中C04的用户加速度误差85%收敛于±0.4×10-3mm/s2;IGSO中C08的用户加速度误差90%收敛于±0.5×10-3mm/s2;MEO中C14的用户加速度误差80%收敛于±0.3×10-3mm/s2;GEO一天的平均URAE为0.236×10-3mm/s2,IGSO一天的平均URAE为0.243×10-3mm/s2,MEO一天的平均URAE为0.267×10-3mm/s2。URAE总体走势方面,三个轨道面均在0附近振荡,没有出现单调增加或减小。国际数据与国内数据收敛范围大致相同,其中GEO一天的平均URAE为0.228×10-3mm/s2,IGSO一天的平均URAE为0.261×10-3mm/s2,MEO一天的平均URAE为0.272×10-3mm/s2;而国内数据的精度偏差GEO为3.51%,IGSO为6.80%,MEO为1.84%。
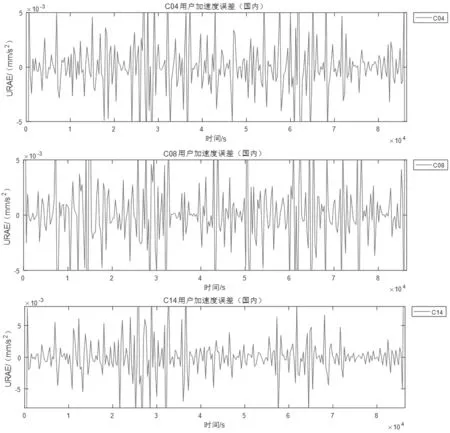
图6 国内URAE(用户加速度误差)
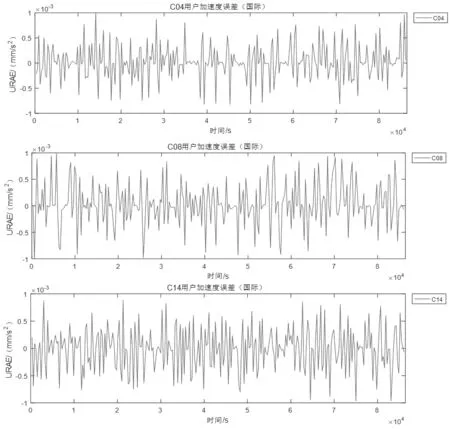
图7 国际URAE(用户加速度误差)
4 结 语
(1)在用户测距误差中,URE(90%)收敛在2 m内。进行误差横向对比,MEO较好,IGSO次之,GEO较差。在用户测速误差中,URRE(90%)收敛于±1 mm/s。误差横向对比结果为:GEO较好,MEO次之,IGSO较差。在用户加速度误差中,URAE(90%)收敛于±0.4×10-3mm/s2内。误差横向对比结果为:GEO较好,IGSO次之,MEO较差。
(2)从用户测距误差、用户测速误差和用户加速度误差三方面分析,除用户测距误差的MEO、IGSO和GEO三个轨道面的误差变化较大外,用户测速误差与用户加速度误差的三个轨道面的误差十分接近。
(3)国内数据与国际数据由精度偏差可得,用户测距误差方面,GEO最好,MEO次之,IGSO较差,而所有的精度偏差均在4.20%内;用户测速误差方面,GEO最好,MEO次之,IGSO较差,而所有的精度偏差均在9.60%内;用户加速度误差方面,MEO最好,GEO次之,IGSO较差,而所有的精度偏差均在6.80%以内。综合分析,GEO精度偏差最小,MEO次之,IGSO较差。
(4)建议我国iGMAS生成的产品,在空间信号方面对MEO与IGSO的星历进行更深程度修正,缩小与国际数据的误差精度,争取早日走上国际舞台。
总体分析,我国iGMAS所发布的星历产品所到的数据,在用户测距误差、用户测速误差和用户加速度误差三方面均达到了国际标准,可作为评估空间信号精度的平台。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
科学(2020年3期)2020-01-06
导航定位学报(2018年3期)2018-09-03
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年7期)2017-06-05
载人航天(2016年4期)2016-12-01
百科探秘·航空航天(2016年9期)2016-12-01
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
