
船用减摇陀螺仪性能仿真分析
2018-08-30 08:50翟亚军张怀宇
机电设备 2018年4期
翟亚军,张怀宇
(中远海运重工有限公司,上海 210120)
0 引言
船舶减摇是提升船舶航行舒适性与安全性的重要途径[1]。在随机海面上航行的船舶的横摇影响着船舶的适航性、安全性、船上设备精确性以及乘员的舒适性。因此,减小船舶的摇摆有着诸多现实意义。
船舶减摇一直是船舶行业研究的热点[2]。目前常见的减摇方式有鳍减摇、舵减摇、减摇水舱和减摇陀螺仪,这些减摇方式各具特点。对鳍减摇和舵减摇的研究开始较早,也比较深入全面,这 2种方式目前在船舶减摇市场上占有很高的比例,但鳍减摇和舵减摇的减摇能力和船速有关,船速越慢,减摇效果越差,且一旦减摇装置发生故障,会产生附加阻力,直接影响到船舶的快速性。减摇水舱占用的体积空间大,被动减摇水舱在波浪过大时甚至会加剧船舶的摇摆,主动减摇水舱则需要很大的动力系统,所以成本过高。
减摇陀螺仪作为一种减摇装置,其性能随着陆上的平衡小车、机器狗等新发明的平台的产生,正在为研究人员所重视[3]。将其固定在船舶适当的位置上,利用高速转动陀螺的进动作用产生减摇力矩,可以减轻船舶的横摇。采用陀螺原理减轻船舶横摇的构想很早就被提出,但由于技术和材料的限制,一直没有发展、完善起来。近年来,随着新技术、新材料的应用,陀螺减摇技术正在从陆上走向水上。随着经济生活的发展,游艇作为反映社会经济水平的标准性产品,正在逐步普及。陀螺仪减摇装置以其体积小、安装简便的特点,在提高游艇舒适性和平稳性方面具有得天独厚的优势[4]。本文建立减摇陀螺装置三维模型和船舶横摇非线性数学模型,在此基础上利用Adams软件进行动力学仿真,在给定的特定船型上验证了陀螺减摇装置在不同海况下的减摇性能,分析了陀螺减摇能力和船舶排水量大小的关系。
1 减摇陀螺的减摇性能模拟
对减摇陀螺减摇性能的模拟包含了船舶、波浪及减摇陀螺克服波浪的激励的反向力矩间三者的耦合作用。因此,建立三者间的力矩平衡模型是进行减摇陀螺减摇性能模拟研究的关键。
1.1 波浪作用下船舶与减摇陀螺耦合横摇力矩平衡非线性数学模型
船舶实际运行中,在波浪作用下的阻尼力矩和恢复力矩呈非线性关系,以Mathiue[x]方程为基础,建立船舶单自由度非线性横摇运动方程。

横摇阻尼力矩取HADARRA等提出的线性阻尼加立方阻尼的形式。

为使计算简便,将回复力矩近似为一个五次多项式。

式中:K1、K3、K5为恢复力矩系数。
将随机波浪激励表示为波倾角的函数,干扰力矩为

式中:D为船舶的排水量;h为横稳性高;α(t)为波倾角,它是时间的函数,由随机波浪叠加而成,可由波倾角频谱定义。

式中:ω为谐波频率;εn为在(0,2)内均匀分布的随机相位角;N为所选取谐波个数;遭遇频率ωe=ω-kucosx;k为波数;u为船舶航行速度;sσ(ω)为波倾角频谱函数,可由海浪谱函数sξ(ω)获得。

式中:g是重力加速度。将式(2)~(4)带入式(1),可得到随机波浪作用下的船舶非线性横摇运动方程。


忽略陀螺外框架的质量,不考虑船舶在其他自由度上的运动对陀螺减摇装置的影响,转子为轴对称刚体,其相对Oz轴的转动惯量为I,相对于Ox和Oy轴的转动惯量为J,转子转速恒定为oω,β为转子相对于Oy轴的进动角。
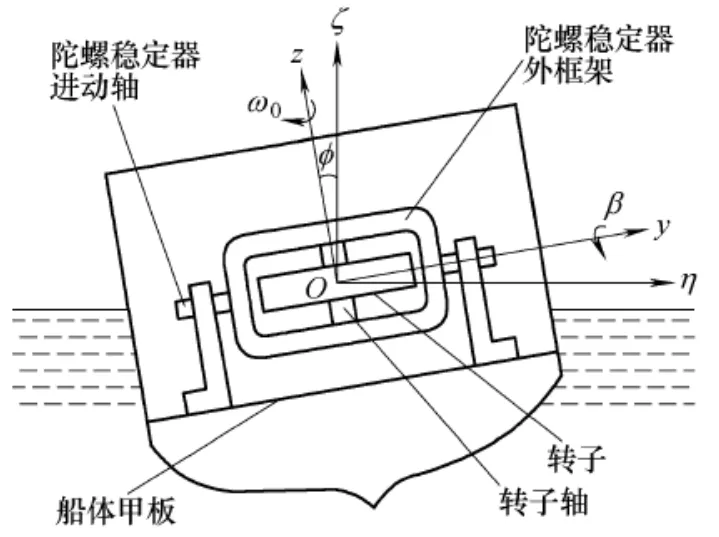
图1 系统坐标系
根据刚体定点运动的欧拉方程,陀螺减摇装置相对于转动坐标系Oxyz的运动方程为

式中:Mx、My、Mz分别为合外力局矢量在 Oxyz坐标系上的分量;ho为陀螺的动量距常数, ho=Iωo。显然,若以Oy轴为输入轴,输入力矩为My,使陀螺产生进动,则在Ox轴将会有力矩Mx输出。将以上运动方程中输出力矩Mx投影到平动坐标系中,由于高速旋转陀螺的稳定性,角速度˙、和ωo极小,忽略其二阶微量,则以上动力学方程简化为

由此可见,若在Oχγz输入力矩My,则陀螺装置会分别在 Oξ、Oς两个轴向输出力矩 Mξ和Mς,而 Mξ可用来抑制波浪激励产生的船舶横摇。陀螺减横摇能力大小由陀螺转子动量距和角速度的乘积来决定,也就是说,陀螺减摇装置的减摇能力由转子相对转轴的质量分布、转动角速度以及进动角来决定。
1.2 SolidWorks建模仿真
SolidWorks是一款功能强大的三维制图软件。以陀螺仪减摇原理为理论基础,在分别设计出各个零部件之后,用SolidWorks的装配功能把零部件组装起来,形成装配体。为了便于后面的仿真分析,图2显示的是简易版的减摇装置装配体。选择气弹簧作为模拟海浪作用在船体的装置,普通弹簧受力不稳定性,而气弹簧速度相对缓慢、动态力变化不大(一般在 1∶1.2以内)、容易控制,而且具有几乎线性的弾性曲线。气弹簧能更加准确地实现海浪作用在船舶上的真实效果。为了便于后续的仿真分析,在不影响仿真结果的基础上,本机构对于一些造成冗余约束的机构进行简化,并且去除一部分影响仿真的因素,比如:删除了轴承和电机,用旋转副代替;删除了螺栓螺帽,用固定副代替。

图2 减摇装置装配体
为了研究减摇装置在横浪中对船舶横摇运动的抑制作用,并考虑到本文所设计的船用陀螺仪的适用性,采用1.8 m海浪2号无人艇为仿真试验船舶,如图3所示。横摇参数根据模型试验获得,该船的基本参数如表1所示。

图3 海狼2号无人艇
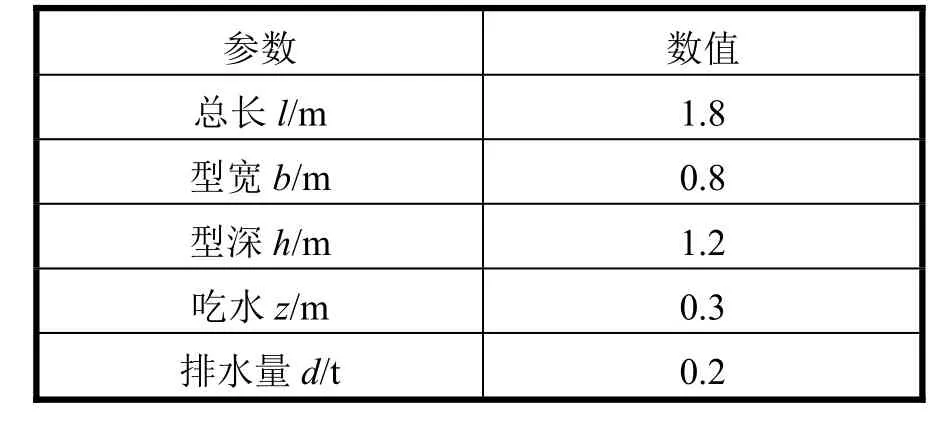
表1 船舶结构基本参数
2 Admas仿真与分析
在SolidWorks三维建模的基础上,把装配体保存为parasolid(*.x_t)格式,导入到Adams中,如图4所示。Adams软件使用交互图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
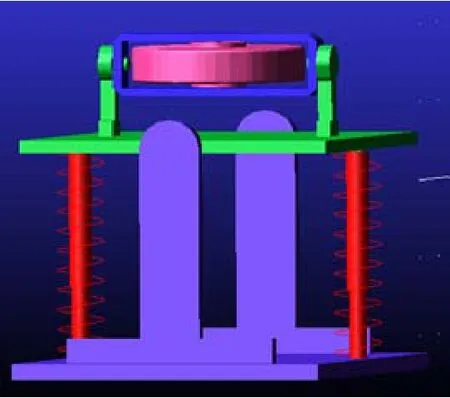
图4 Adams仿真模型
海浪模型可分为二维长峰波随机海浪模型和三维不规则短峰波随机海浪模型[5]。二维长峰波随机海浪也被称为二元不规则波或长峰波,是指海浪向着一个确定的方向传播,其波峰和波谷相互平行并与波浪前进方向垂直。三维不规则短峰波随机海浪是指由风激励产生的波浪,由于风方向的随机性,其波浪不仅会向一个方向传播,同时也会向其他方向传播,从而在海面上形成一个个大小不等的小丘,也称为三元不规则波或者短峰波。本文采用二元不规则波仿真研究船舶在随机海浪中的动力学特性。可以近似地把长风波波形看做正弦函数图像形式。用正弦函数A*sin(Bd*time)来模拟海浪周期和大小,其中A指的是海浪的振幅,B指的是海浪在x轴上单位时间内所运动距离,即周期。海上波浪实际上是不规则的,它们由各种不同波长、波高和陡度的波组成。经观测统计表明[6]:1/10的波的波高是平均波高的 2倍,其被称为最大波高(hw/10);1/3的波的波高是平均波高的1.6倍,其被称为三一平均波高或有义波高(hw/3)。人们在海上目测的波高很接近有义波高。为了使仿真更加便捷、更具针对性,文章所使用的波高为有义波高。不同海浪等级所对应的有义波高如表2所示。
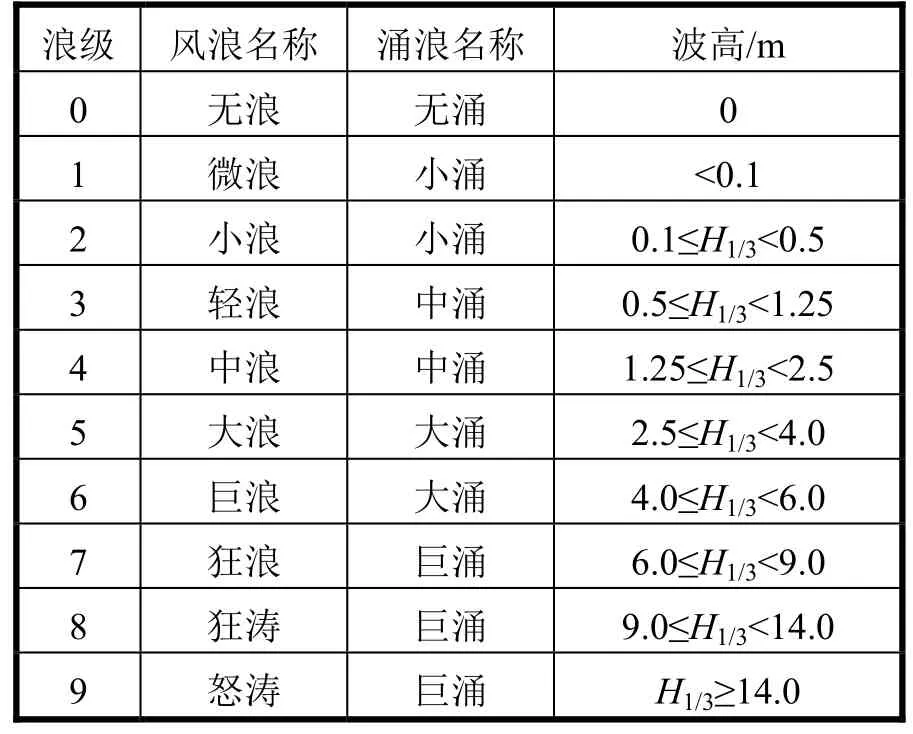
表2 不同海浪等级所对应的义波高
为了更加准确方便地模拟海浪,本文取用有义波高来模拟不同级别的海浪,如图5所示。分别在陀螺减摇系统转子转速为0 r/min和8 000 r/min的情况下,对不同等级的海浪进行Adams动力学仿真,设置仿真时间为10 s,仿真步数为5 000,如图6所示。
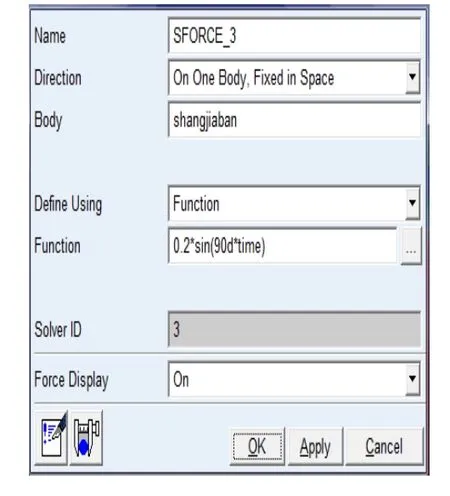
图5 有义波高

图6 陀螺转子转速和仿真步数
一级海浪下,陀螺减摇系统转子转速分别为0 r/min和8 000 r/min时的仿真结果如图7所示。

图7 一级海浪仿真结果
二级波浪下,陀螺减摇系统转子转速分别为0 r/min和8 000 r/min时的仿真结果如图8所示。
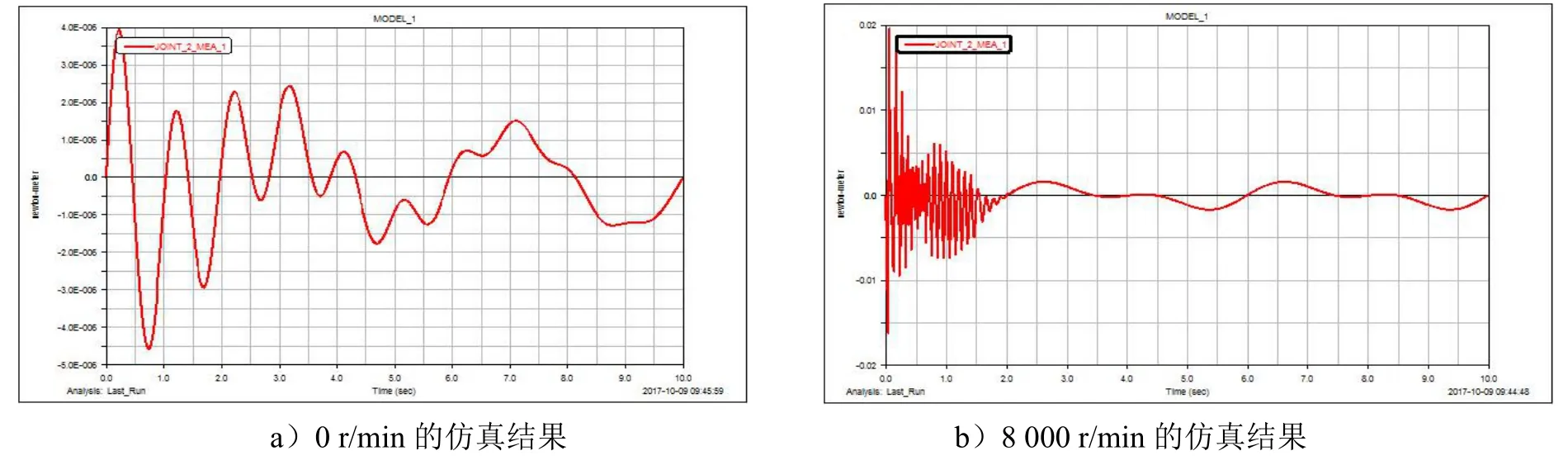
图8 二级海浪仿真结果
三级波浪下,陀螺减摇系统转子转速分别为0 r/min和8 000 r/min时的仿真结果如图9所示。
图9 三级海浪仿真结果
四级波浪下,陀螺减摇系统转子转速分别为0 r/min和8 000 r/min的仿真结果如图10所示。
图10 四级海浪仿真结果
五级波浪下,陀螺减摇系统转子转速分别为0 r/min和8 000 r/min时的仿真结果如图11所示。

图11 五级海浪仿真结果
根据仿真结果,可以看出:当海浪等级小于三级时,本文所设计的船用陀螺仪有很好的减横摇功能,在一级波浪的时候,减摇性能甚至可以达到90%左右。但由图10可以看出:当波浪等级为四级时,陀螺减摇装置的减摇效果已经很弱了,但是可以减小船舶的横摇频率。由图11可以看出:当波浪大于五级时,减摇装置不仅不能减摇,还会增加横摇。此处需要注意一个问题,即一般船舶抗风浪能力在一定程度上和船舶的吨位相关,船舶吨位越大,相应的抗风浪等级越强。本文所设计陀螺仪搭配的船舶吨位较小,其抗风浪能力相对较小。而对于一般非军用船舶来说,即使有一定抗风浪能力,公司船东也不会允许船舶在大风浪天气下航行,因为大风浪会造成各种不可抗拒因素,一般遇到四级或者五级海浪,小型船舶就会选择进港避风。
船用陀螺仪抗横摇能力和转子相对于转轴的位置有关,即是和转动惯量有关。本试验中的陀螺转子质量较小,因此减摇能力有限,当换用较大转子后,减摇能力会增强。同时,可以减少影响转子转动速度的因素,提高转子的转动速度,比如可以使陀螺转子在一个真空密闭的环境中转动,这样可以使转子的转速提高两倍以上,重量减轻三分之一,用电量仅为过去的二分之一。
根据仿真结果,可以发现本试验装置的两个明显弱点:1)打开减摇装置的瞬间,会给船舶造成一个类似于快速抖动的影响;2)当波浪等级过大时,陀螺减摇装置不但不会减摇,甚至还会增强船舶横摇。对于这种现象,可以为减摇系统增加一个控制器,以此来控制陀螺减摇装置进动,使其在受外力矩作用时,也能实现主动控制进动,从而减少摇晃。
3 结论
本文所设计的减摇装置可以在一定程度上减轻船舶横摇。在理论分析和实际运用的基础上,可以得出陀螺减摇器容量选择范围:总动量距(kNms)=船舶排水量(t)×选择系数,选择系数应在0.20~0.40之间,根据船舶的其他技术参数及航行海况进行确定。由此结论可以看出:如果陀螺转子拥有更加大的转速和质量,并加入主动进动控制系统,那么可以明显增加陀螺系统的减摇能力。此外,可以在同一艘船舶上使用多个陀螺减摇系统,以获得很好的效果。
猜你喜欢
幼儿园(2021年13期)2021-12-02
小读者(2021年2期)2021-11-23
北京航空航天大学学报(2021年9期)2021-11-02
书香两岸(2020年3期)2020-06-29
百科探秘·航空航天(2017年9期)2017-12-31
弹箭与制导学报(2017年3期)2017-11-01
中国惯性技术学报(2017年1期)2017-06-09
雷达学报(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
现代防御技术(2014年4期)2014-07-10
