
自适应无人艇测量系统架构设计与验证
2018-08-30 08:50麦若绵贾登科艾泽宇
机电设备 2018年4期
麦若绵,贾登科,艾泽宇
(中交第四航务工程勘察设计院有限公司,广州 510230)
0 引言
随着我国对自然资源保护力度的加强,加强对水库、水坝、河流等水资源的监测与调查非常必要。为获得江、湖水域资源参数数据,特别是水下地形的数据,水面测量船是重要的工具。在特殊水域,受天气、人力、船型和安全等因素的影响,传统的、依托母船和人工参与的水下地形测量方式存在一定的难度和风险。随着信息技术和人工智能技术的发展,基于自主导航、自动控制和远程通信等技术的无人艇测量系统成为未来发展的趋势[1-2]。
当前,在军事需求的牵引下,国内外学者对无人艇平台设计及其应用开展了大量的研究,有力地推进了无人艇系统的开发与应用。NAEEM等[3]设计了集成GPS、测深仪的无人船用于航道水深的测量。杨瑞庆等[4]结合环境识别技术和无线网络技术,构建了包括信息采集、信息处理、信息传输等功能的无人艇测量系统架构。金久才等[5]利用无线电遥控将岸基(母船)控制单元和测深船控制单元进行延时补偿处理,实现了无人船测量系统数据传输的实时性。彭琳等[6]分析了船体姿态变化对测量误差的影响,通过改进旋转角参数来实现测量误差修正的方法。陈立波等[7]通过集成卫星定位、智能导航控制和实时通讯等技术,搭建了一个智能化无人水下测量系统,并实现网络化覆盖。黄国良等[8]设计了一套基于无人船的内河航道信息测量系统,以满足复杂水域的水文测量要求。无人艇测量系统所涉及的技术比较广泛,张浩昱等[9]提出了一种模糊PID控制算法以实现在线自适应优化的要求,并利用水池试验结果对所提出算法的有效性进行了验证。冯月卫等[10]开展了无人艇模型的航行姿态、稳性等参数的自主控制实验,并对无人艇的总体布局进行了优化。耿以才等[11]利用安全目标追踪算法,开展了双回路追踪及自动避障策略研究,提出了无人船实时航行的最短路径算法。葛增鲁[12]使用常规PID和模糊PID算法设计运动控制器,将其应用于无人艇上进行实船验证。
在本文中,针对浅水水域水下地形测量的需求,开发出一套便携型水面无人测量系统,将新船型技术、智能导航技术与测量检测技术融合在智能探测无人艇上,通过对河流水文等数据的采集、处理、存储及远程传输,以实现对水库、湖泊、堤坝、航道水深情况的监测。
1 系统功能与架构
在无人艇测量系统中,为实现预定目标,需要确定该系统的基本功能和实现该功能的基本架构。
1.1 系统功能
为开展浅水域中的水下地形测量、水下地貌绘制、水面环境探测等作业,实现测量系统的自主航行、自动避障等功能,满足河川、湖泊、海岸、港湾、水库等水域对水上测量系统的要求,研制开发一款便携、可靠、经济的无人测量艇系统非常必要。无人艇以新型多体船型为基础载体,通过搭载测深仪器、摄像仪器、DGPS等模块,结合智能导航系统和岸基(或母船)系统,实现人工/自动操控、自主航行等功能。采用无线传输方式,对无人艇进行遥控操作和控制、实现实时数据传输和监控、在岸基设施接收和存储采集的数据资料。无人测量艇可用于监测水库、湖泊、堤坝、航道的畅通情况,测量和监测河流水文特点,快速获取高精度地理信息。
1.2 系统架构
水面无人测量系统由船体系统、动力系统、探测系统、船载数据存储系统、船载控制系统、信息传输系统和岸基控制系统等子系统组成,整个系统功能示意图如图1所示。

图1 无人艇系统
在无人艇系统中,各子系统功能描述如下:船体为双体,兼顾了快速性、稳性以及设备安装对小艇的需求,艇体材料采用具有强度高、耐腐蚀、耐撞性好的金属框架+玻璃钢结构;动力系统中,使用锂电池作为动力电池,使用双桨双舵动力推进形式,同时电池还为惯导、DGPS移动站、PC104电源模块等供电;探测系统包括水深探测仪、DGPS设备和摄像系统,探测仪使用高精度ISA500数字水下高度计实现对水底或水下目标的回声测距,并以模拟和数字形式对外输出,DGPS设备提供远程基站多星RTK基线,摄像系统可提供图像用于避碰;船载控制系统选用PC104系列工控机,它是整个无人船的控制核心,支持 Linux、Windows等主流操作系统;信息传输系统通过大功率远程数传电台实现远程桌面操控,执行图像传输和信号传输功能;岸基控制系统可远程遥控无人艇的运动,它与无人船子系统中的无线通讯系统组成了一套点对点的无线通讯系统,可实时接收并存储探测数据。
2 系统软件设计
在无人艇系统中,使用 Labview语言编写控制软件,开发具有人机结合良好的监控界面。同时,采用执行效率高、稳定性强的C语言编写执行机构控制程序。
1)执行机构控制程序
使用C语言编写STM32驱动程序,STM32核心板使用RS232协议与下位机通信,执行机构包括螺旋桨和垂直舵。其中,STM32核心板的PWM通道产生脉宽调制信号、GPIO通道产生脉冲信号,发送给电机驱动器,实现对螺旋桨的运动控制;STM32产生频率为50 Hz的PWM数字信号驱动舵机,实现对垂直舵的控制。设计的通信协议如图2所示。
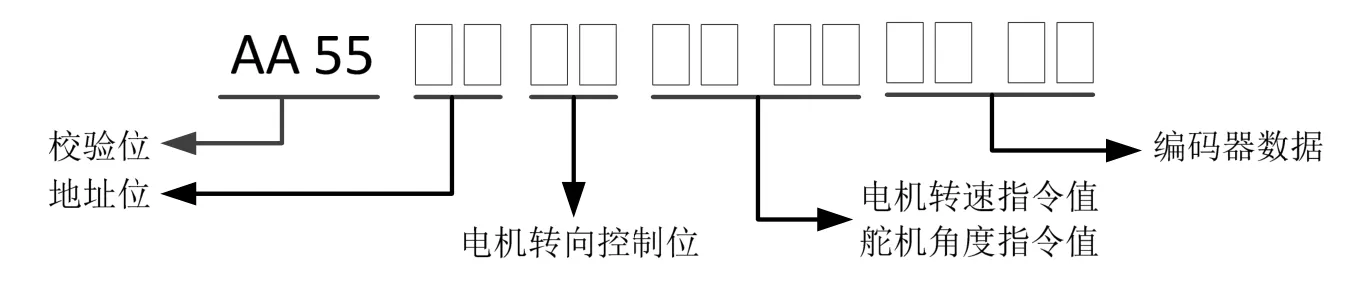
图2 上位机、下位机通信协议
当上位机发送控制指令、下位机接收和发送数据时,按照图2所示通信协议对控制指令进行封装,上、下位机根据收到的指令进行解码,实现相应的功能。
2)数据采集软件设计
无人艇航行过程中,需实时记录一些设备功能数据,如:执行机构动作数据,包括电机转速指令数据、舵角指令数据、电机转速实时数据、舵角实时数据;航行状态数据,包括无人艇三轴角度、角速度、加速度,无人艇航速、绝对经纬度坐标值;目标的距离、航向、航速、大小;探测数据。在设计软件时,各功能数据使用同一频率实时保存,并以txt格式文件的形式实时保存至下位机硬盘中,供后期处理使用。
3)操控控制软件设计
无人艇操控系统具有的功能包括航行姿态显示、经纬度显示、航速显示和电机转速显示等,系统包含指令按钮、数据保存模块和手动操作模块等。
无人艇搭载惯性导航单元,通过使用 Labview编写的数据采集程序,可以实时读取无人艇的三轴角度、三轴角速度、三轴加速度数据。在无人艇操控界面中,使用 Labview三维场景显示控件,将其与惯性导航单元的数据链接起来,即可实时地以三维动态形式显示出无人艇的航行姿态。
无人艇具备自主航行功能,但在某些情况下需要操作人员手动操作。通过在 Labview的键盘空间编写操控指令,操控者可以通过键盘按钮对无人艇进行远程操作。
3 关键技术
自适应无人艇除了具有一般无人艇的基本功能外,还能实现人工/自动操控和自主航行功能。为实现上述功能,所涉及的关键技术包括如下几部分。
3.1 自主航行技术
在给定航路约束点的情况下,自适应无人艇能基于电子海图自主规划路径,并自主控制航向和航速。同时,无人测量船(艇)在作业水域探测时若受到风浪等影响,不可避免地要偏离原来给定的航向。精确的航向控制是解决航迹跟踪、自主航行和自动避碰等功能的前提。本文研制的测量船具有自动驾驶功能,其智能运动控制系统总体目标为:操作员通过基站设定航行任务,相关执行器根据航线信息,差分GPS或北斗位置,惯导的姿态、航向、方位等位置信息,实时计算出航线跟踪所需要的航向角和航速,并解算出所需的舵角,从而沿着计划测线控制。
3.2 自主避碰技术
在浅水区域中,存在大量的水下或水面障碍物,其会对无人测量船(艇)以及艇底测量设备构成危险。因此,需要寻求水面和水下障碍物立体实时感知和立体组合避碰技术,从机动能力、障碍探测、避障决策等多方面展开研究,保障无人测量船(艇)的安全。无人艇的一个重要功能是智能规避静止障碍物和移动障碍物,并能够在避开障碍物之后继续完成预定任务,即在保证自身“安全”的前提下,完成指定的任务。智能规避是无人艇实现自主航行的基本前提,而智能探测和感知又是实现规避的基础。无人艇的智能感知技术指的是无人艇能够通过自身传感器和探测设备,对水面及水下的静止或移动目标进行探测,以确定无人艇的大小、方位、航速、航向等信息的技术。
船舶智能避碰系统属于控制系统内的一个闭环系统,包括传感器检测与反馈子系统、船舶运动控制子系统和船舶动态避碰子系统。在智能感知技术的基础上,研究和建立了面向自主避碰的无人艇运动模型,并利用DCPA和TCPA概念建立了船舶避碰的决策数学模型,利用最优控制原理进行无人艇自主避碰的实时解算和控制,避碰功能架构如图3所示。
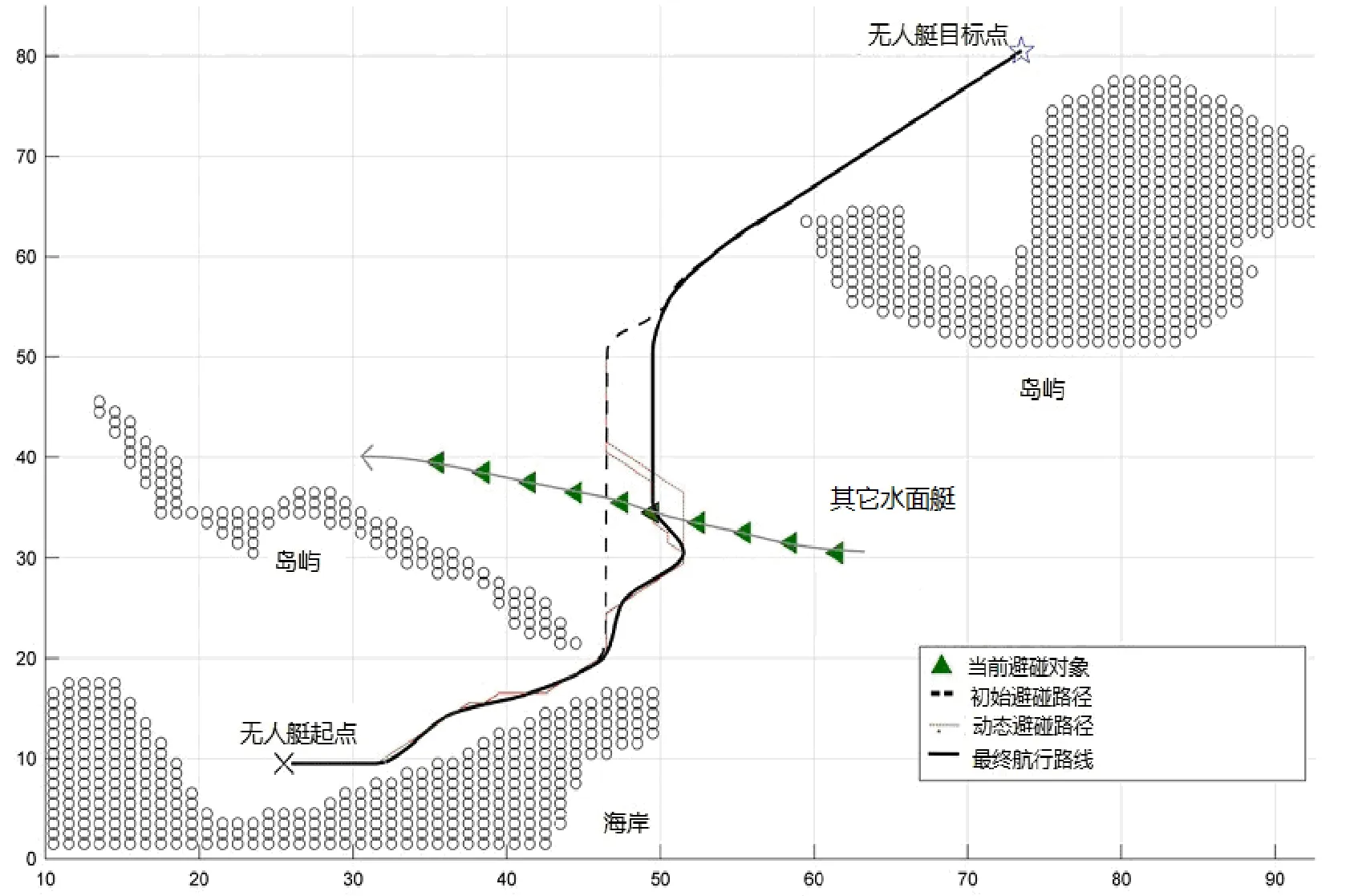
图3 综合避碰仿真图
4 试验验证
为验证无人艇测量系统架构设计和软件的合理性,论证对关键技术的解决情况,建造一艘便携型无人艇并进行相关功能的试验验证。
4.1 无人艇建造
对于船体系统,为兼顾无人艇这类小型船对快速性和稳性的要求,开发出高速穿浪双体船,该船型保留了小水线面双体船的低阻、高耐波性、高稳定性及常规双体船甲板面积宽敞的优点,克服了小水线面双体船的片体无储备浮力和要求复杂的航态控制系统及传动系统等缺点。为保证无人艇测量系统的便携性,其总体尺寸和质量比较小,无人艇的外形尺寸为900 mm×400 mm×200 mm(长×宽×高),总质量约12 kg,可装在旅行箱内进行携带。操控电脑为笔记本电脑,保证了携带的方便性。图4为无人艇外形和内部图。

图4 无人船图
4.2 功能验证
为检验无人艇测量系统的技术融合效果,对无人艇的设备及系统的功能进行验证。功能验证主要内容是检测探测仪器设备在标定、静态和动态3种方式下的测深精度。探测设备标定主要是在岸上对水深探测仪、DGPS系统、摄像系统等设备的精度进行确认,获得精确的设备参数;静态方式是无人艇在静止水面上进行测量,获得测深板的深度作为标准水深值,然后横向摇晃测量船,模拟遥控测量船测量时的摇晃状态,记录换能器在单摆安装方式下测得的水深值,并和已知的标准水深值比较;动态方式是通过岸端服务器设定多个目标点和1个home点,无人航道测量船在自动导航模式下,按照预设定依次通过多个目标点,并最终返回到home点。图5为深度图,图6为无人艇DGPS系统定位图。

图5 水深度图
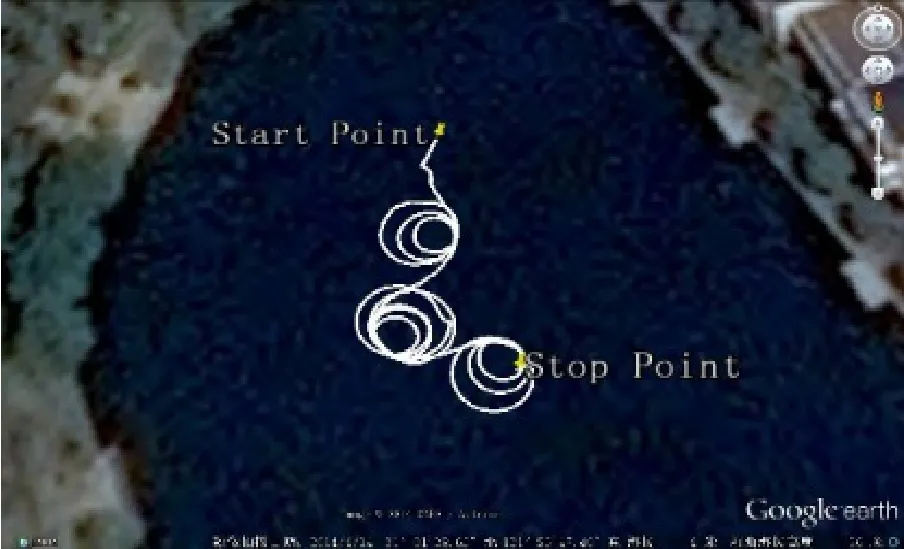
图6 无人艇DGPS系统定位图
5 结论
针对特殊水域水下地形测量的需求,开发了一套具有自适应性的便携型无人艇测量系统。本文从无人艇测量系统的功能需求出发,探索了该系统的基本架构和相关关键技术解决路径。最后,通过对无人艇的试验,验证了该无人艇测量系统在特殊水域实施水域地形探测的效果和应用前景。研究成果可为后续技术改进和商业实施提供技术支撑。
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
中学生英语(2017年6期)2017-07-31
岷峨诗稿(2017年4期)2017-04-20
青年歌声(2017年6期)2017-03-13
科学大众(中学)(2016年8期)2016-05-14
