
系泊状态舰载捷联惯导系统的全参数在线标定∗
2018-08-28 02:50武雨霞
舰船电子工程 2018年8期
袁 鹏 杨 雨 陈 光 晏 亮 武雨霞
(北京航天时代激光导航技术有限责任公司 北京 100094)
1 引言
目前,静基座条件下的分立标定技术与系统级标定技术都较为成熟[1~5]。针对捷联惯导系统在系泊状态下在舰标定的需求,国外学者提出了利用位置误差作为量测量,基于Kalman滤波器的系统级标定方法[6],但是这种方法依赖GPS提供位置信息,容易受到干扰。
为了摆脱对GPS等外部设备的依赖,在无外部设备提供信息的条件下,仅依靠捷联惯导系统自身输出的信息,实现舰载捷联惯导系统在舰的全参数标定,本文设计了低通滤波器获取速度误差信息作为量测量,通过设计合理的标定路径充分激励陀螺和加速度计零偏,标度因数误差,安装误差等全部参数,并借助惯导系统的双轴旋转机构实现各转位,最后通过对IMU转位数据进行导航滤波,估计出全部参数。
2 基于加速度计基准坐标系的惯性器件误差模型
首先定义加速度计基准坐标系OXYZ:以X加速度计轴向为加速度计基准坐标系的X轴方向,以X、Y加速度计所在平面为加速度计基准坐标系的XOY平面,Y轴在XOY平面内,并与X轴正交,Z轴垂直于XOY平面。
采用上述坐标系可以使加速度计安装误差减少3个,从而降低Kalman滤波器维数,减少标定时间。
基于加速度计基准坐标系建立的加速度计的误差模型表达式为
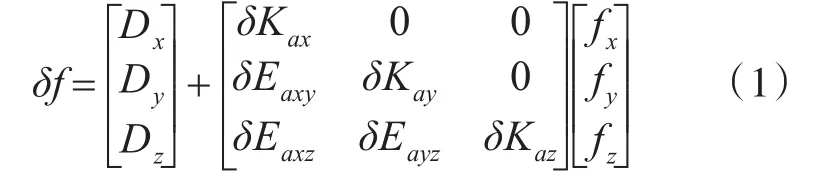
其中 Dx、Dy、Dz为加速度计零偏,δKaz为加速度计标度因数误差,为加速度计安装误差,fx、fy、fz为加速度计测得的加速度。
陀螺的误差模型表达式为

其中 Bx、By、Bz为陀螺零偏,为陀螺标度因数误差,为陀螺安装误差,ωx、ωy、ωz为陀螺测得的角速度。
3 Kalman滤波器模型
在采用加速度计基准坐标系的情况下,能够减少加速度计的3个安装误差,所以状态变量选取如下,共33维:

本文不加推导地直接给出如下状态方程和量测方程:
状态方程:

式中,






其中,R为地球半径,ωie为地球自转角速率,VE、VN、VU为惯导东、北、天向速度,fE、fN、fU为加速度计东、北、天向加速度,C11、C12、C13、C21、C22、C23、C31、C32、C33为姿态矩阵对应位置上的元素,w1、w2、w3、w4、w5、w6为零均值随机白噪声。
量测方程:

式中

其中,I3×3为单位矩阵,v1、v2、v3为零均值随机白噪声。
4 低通滤波器获取速度误差的实现
舰载捷联惯导解算输出的速度信息中包括速度误差和真实速度两部分,其中真实速度是舰船在海浪作用下产生的,因而真实速度的频率与海浪的频率基本相同。实验表明,海浪的频率在0.05Hz以上,速度误差的频率远低于0.05Hz,所以真实速度相对速度误差而言是高频量[7~8]。因此只要设计合理的低通滤波器,就能够将相对高频的真实速度滤除,同时获取速度误差。
因为惯导系统的计算机计算能力有限,整个在线标定的计算过程是在惯导系统的计算机中处理的,而IIR滤波器具有零极点,可用较小的阶次达到较好的滤波效果,具有计算量小,延迟小的优点,所以综合考虑选用IIR滤波器对惯导解算输出的速度进行滤波,以获取速度误差信息。
为验证设计的IIR滤波器效果,利用某型惯组进行摇摆试验,使用设计好的IIR滤波器对惯组解算的速度进行滤波。限于篇幅,仅给出北速滤波前后的结果图,如图1所示。可以看出滤波器能够将速度误差信息从解算速度中提取出来。

图1 滤波前后的速度比较
5 标定路径编排
舰船处于系泊状态时,无法做出机动动作,而要激励出全部待标定参数,必须改变IMU的姿态。因此为实现捷联惯导系统在系泊状态下的全参数标定,必须使用具有双轴旋转机构的捷联惯导系统。本文采用的方法对转停位置精度没有要求,只需考虑如何转动才能激励出全部标定误差参数。通过分析各位置可观测度[9~10],设计了一种标定路径方案。下面直接给出该标定路径编排方案,如表1所示。借助惯导本身具有的双轴旋转机构即可实现所有转动位置。
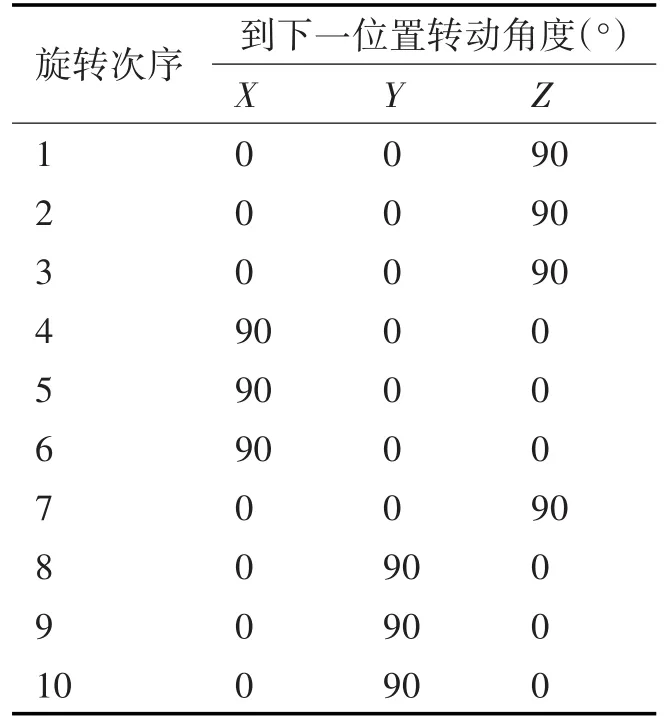
表1 标定路径编排
6 试验验证
6.1 仿真试验验证
本文仿真条件为
1)舰船系泊状态下的速度模型:
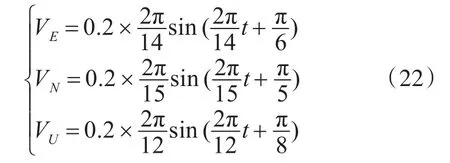
2)舰船系泊状态下的摇摆模型:

其中,θ为纵摇角;γ为横摇角;ψ是艏向角。
3)仿真标定时间为2600s。
根据模型和设计的标定路径编排方案,仿真生成标定过程中的加速度计和陀螺输出,进行了标定仿真试验,对标定数据进行多次迭代计算,以达到期望的标定精度[11~12]。为避免单次仿真标定试验结果的偶然性,总共做了5次仿真标定试验,取5次试验结果的均值作为最终仿真标定结果。最终全参数仿真标定结果如表2所示。其中Eayx,Eazx,Eazy加速度计安装误差角,Egxy,Egxz,Egyx,Egyz,Egzx,Egzy为陀螺安装误差角。
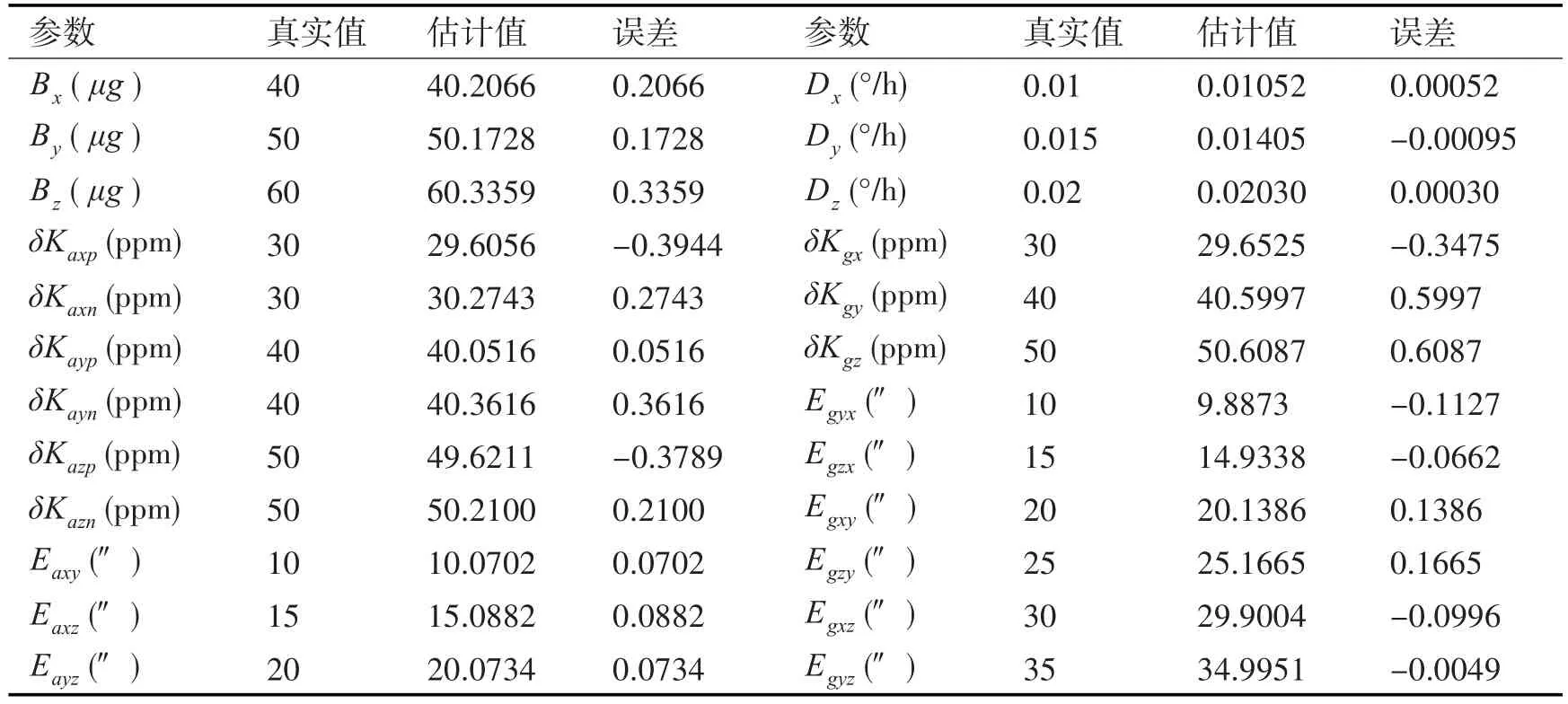
表2 仿真标定参数真实值和估计值比较
从表2可以看出,加速度计零偏估计精度优于1μg,陀螺零偏估计精度优于0.001°/h。加速度计标度因数误差和陀螺标度因数误差估计精度均优于1ppm。加速度计安装误差和陀螺安装误差估计精度均优于1″。
限于篇幅,仅给出5次仿真试验中某次标定仿真试验的陀螺安装误差角的仿真估计曲线,如图2所示。从图2中可以看出,陀螺安装误差最后都能被准确估计出来。
6.2 实物试验验证
采用某型带双轴旋转机构的激光惯组在摇摆台上进行摇摆试验,采用与之前仿真试验一样的系泊状态下的舰船速度模型和摇摆模型,标定时间为3000s。目前不依赖于高精度转台的静基座系统级标定技术已经能够实现很高的标定精度,本文选择此方法作为参考,连续做5组静基座标定试验,取5次标定结果的均值作为静基座的最终标定结果,再连续做5次动基座标定试验,取5次标定结果的均值作为动基座的最终标定结果,以静基座标定结果作为参考,对动基座标定结果进行评价,试验结果如表3所示。
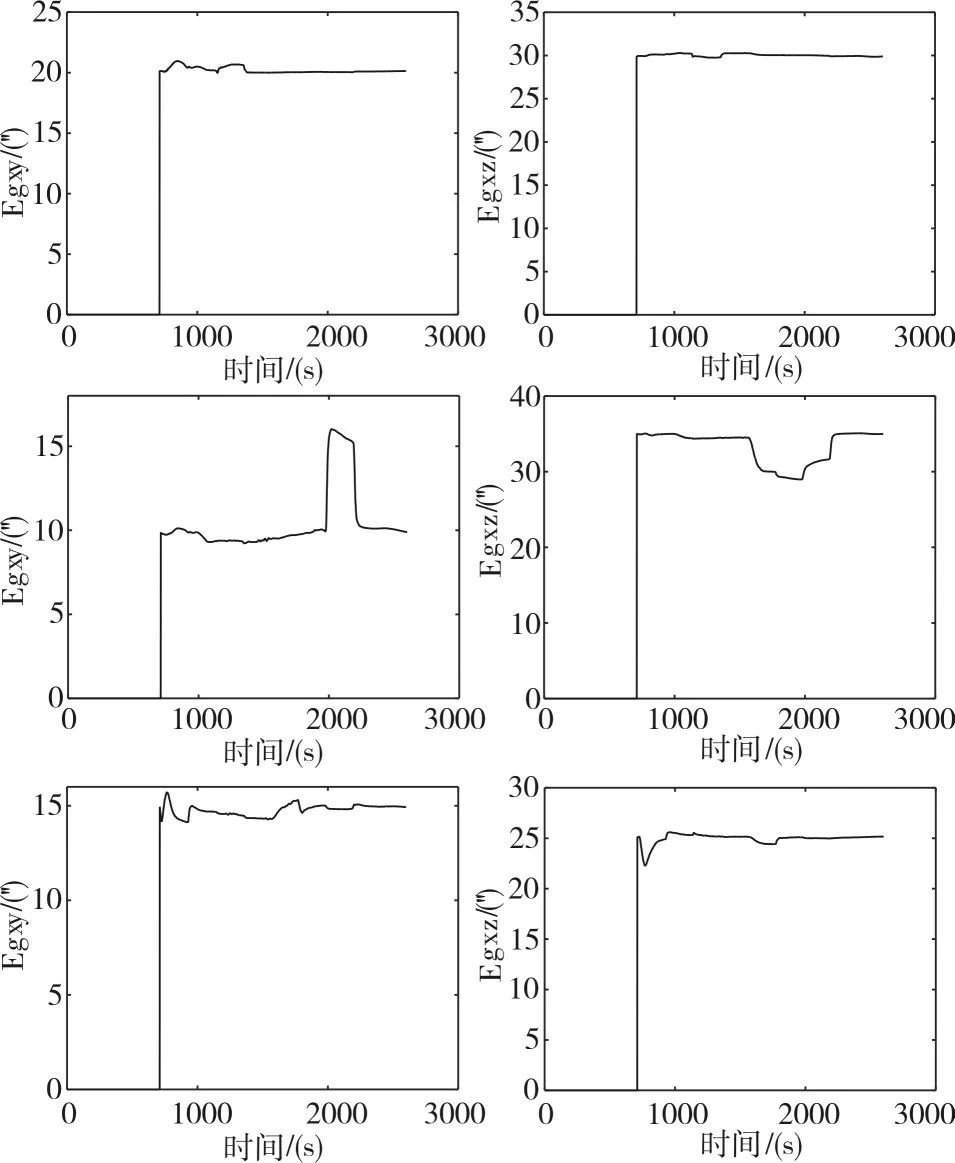
图2 陀螺安装误差角仿真估计曲线
从表3可知,本文介绍的动基座标定方法的标定结果与静基座系统级标定方法的标定结果相比,陀螺标度因数相差小于2ppm,加速度计标度因数相差小于3ppm,安装误差角相差小于1″,陀螺零偏相差小于0.002°/h,加速度计零偏相差小于2μg。
限于篇幅,仅给出5次动基座试验中某次试验的最后一次迭代计算时的陀螺安装误差角估计曲线,如图3所示。从图3中可以看出,实际系统的陀螺安装误差角最后都能被准确估计出来。
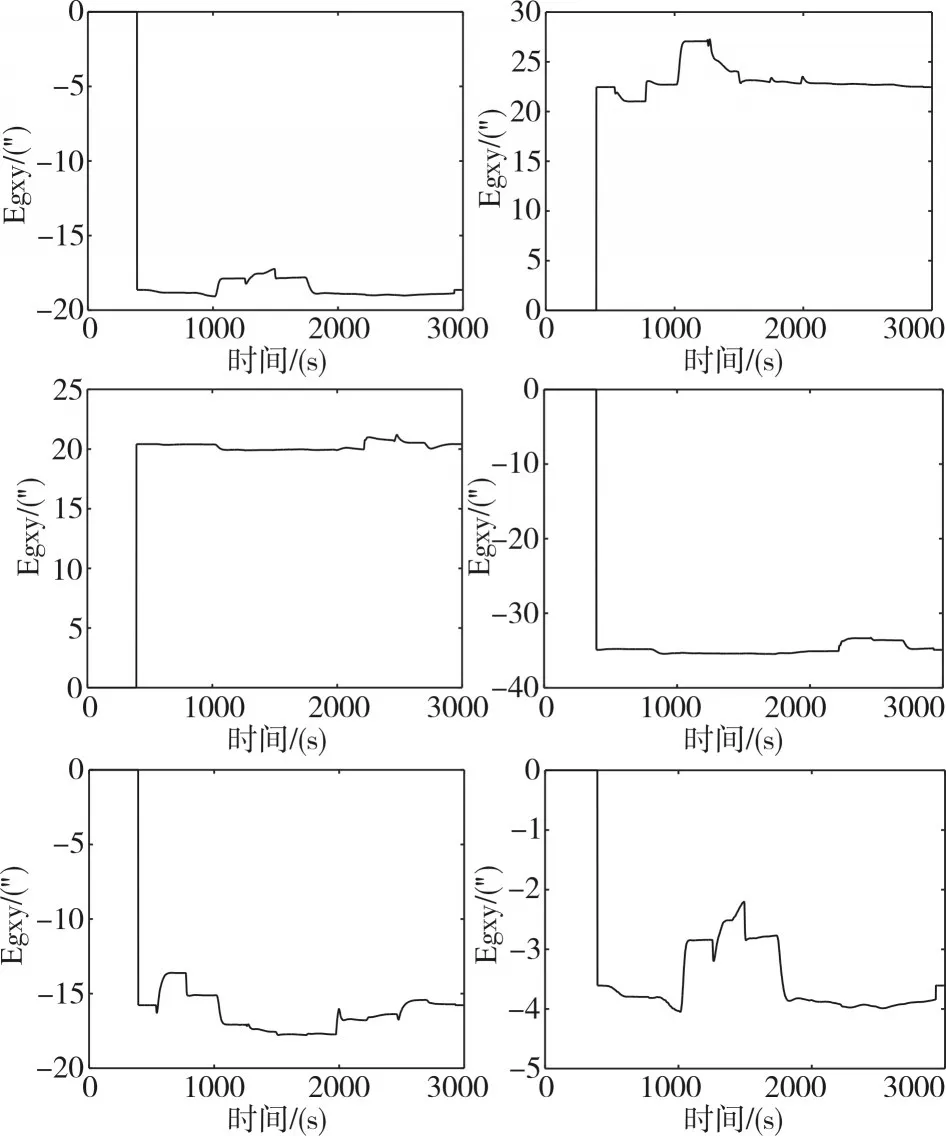
图3 实际系统的陀螺安装误差角估计曲线
7 结语
本文提出了一种适用于系泊状态的捷联惯导系统全参数在线标定方法。通过建立基于加速度计基准坐标系的惯性器件误差模型,使得待标定参数减少了3个,从而降低了Kalman滤波器维数。通过惯导系统的双轴旋转机构,能够使惯导系统按照编排好的路径转位,激励全部待标定参数,从而使得惯导系统能够实现免拆卸在线标定。为了滤除舰船真实速度信息,通过设计低通滤波器来获取速度误差作为量测量,避免了使用GPS等设备,使得标定全过程都不依赖外部设备提供信息。仿真试验和实物摇摆试验结果表明,该方法能够准确地估计出全部参数,能够达到静基座条件下的系统级标定方法的标定精度。下一步将进行实船系泊标定试验,进一步验证该方法的工程使用价值。

表3 捷联惯导动基座标定结果和静基座标定结果比较
猜你喜欢
上海理工大学学报(2022年3期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
数字海洋与水下攻防(2020年5期)2021-01-04
导航与控制(2020年3期)2020-09-09
船海工程(2020年3期)2020-07-31
导航与控制(2019年4期)2019-09-25
船舶与海洋工程(2018年4期)2018-09-10
北京航空航天大学学报(2018年1期)2018-04-20
