
SPAR平台张紧式与半张紧式系泊性能比较
2018-09-10 10:27袁洪涛王钰涵
船舶与海洋工程 2018年4期
康 庄,付 森,袁洪涛,王钰涵
(1. 哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001;2. 上海外高桥造船有限公司设计二所,上海 200137)
0 引 言
海洋平台的定位方式主要有系泊系统定位、动力定位及动力定位+系泊组合定位等 3种,其中系泊系统定位因结构简单、价格优良而得到广泛应用[1]。系泊系统作为海洋结构物在作业时用到的定位装置,对相关平台、设备、设施的正常运行和工作人员的生命安全有着至关重要的影响。目前国际上通用的系泊系统是半张紧式系泊系统,既可为平台提供充足的回复力,又可减小平台的自重[2-3]。张紧式系泊系统采用湿重小的合成纤维材料,具有重量轻、耐腐蚀等优点[4]。
1) 悬链线式系泊系统是一种依靠系泊线自重为平台提供三自由度回复力的系泊系统,当作业水深>1500m时,由于悬链线式系泊系统的重量和系泊半径过大,系泊性能严重下降。适用于深水作业的半张紧式和张紧式系泊系统见图1。
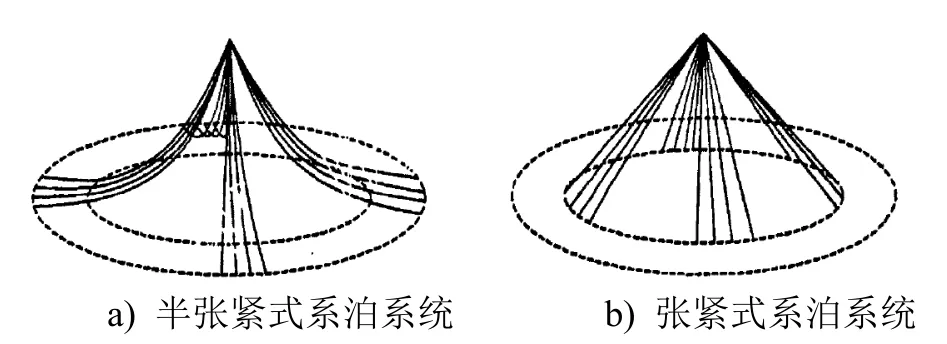
图1 适用于深水作业的半张紧式系泊系统和张紧式系泊系统
2) 半张紧式系泊系统自身重量小,且锚链和丝绳的经济性能良好,使得其成为代替悬链线式系泊的首选系泊方式。
3) 张紧式系泊纤维材料的湿重小、系泊半径小、水平恢复力大、垂向载荷小[5-7],可在一定程度上降低采购和安装时的经济成本。
针对上述系泊系统的特点,应用商业水动力软件AQWA对SPAR平台的半张紧式系泊系统和张紧式系统进行水动力计算,分别得到各自的运动和受力曲线,整理数据结果并找出2种系泊方式的优劣。
赵战华[8]对一艘工作水深为1500m的半潜式海洋平台的张紧式系泊系统进行研究,结果表明该平台的纵荡、横荡和系泊线张力都要比采用半张紧式系泊系统时明显小,但随着锚泊角的增大,垂向力增大的同时,平台的垂荡效应加剧。WANG等[9]对浅水中浮式生产储油卸油装置(Floating Production Storage and Offloading,FPSO)的悬链式系泊系统和张紧式系泊系统进行研究,对比采用2种系泊系统的FPSO水平位移和回复力,结果表明张紧式系泊系统的性能更优、经济效益更好。
上述研究可为动刚度的计算提供参考,但仍需较为完善的模型来反映非线性应力应变关系,同时计算精度仍有进一步提升的空间。为满足实际工程需要,本文基于API RP 2SM规范,针对我国南海作业环境下的SPAR平台,选择同样的作业工况,比较半张紧式系泊系统和张紧式系泊系统的性能,为今后系泊系统的设计和应用提供参考。
1 系泊系统静力及动力分析理论
静力分析和动力分析是数值计算中常用的方式,其中:静力分析采用悬链线法,从单根系泊线入手,可快速预估其几何形状及应力分布;动力分析主要有集中质量法和细长杆理论2种方法,可更加准确地预报系泊线在极端海况下的动力响应,以此检验应力是否在许用应力范围之内[10-12]。
1.1 悬链线法
采用微元法对无弹性系泊线任意一小段单元进行静力分析。图2为无弹性悬链线式系泊线静力图,其中:ω为系泊线单位长度湿重;θ为张力T与x轴的夹角。平衡方程为
1) 水平方向

2) 竖直方向

忽略式(1)和式(2)中的小量和二阶微量,并对其进行积分得


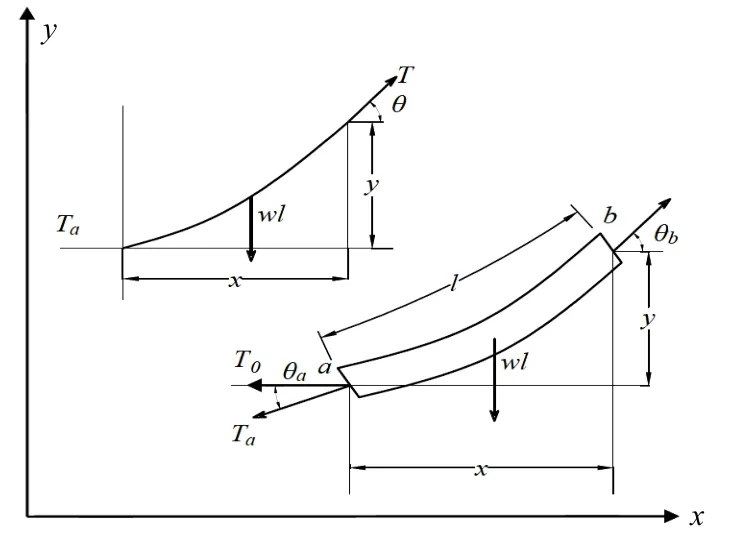
图2 无弹性悬链线式系泊线静力图
从式(3)~式(5)中可看出系泊线不同参数之间是相互关联的,在给定若干个参数之后便可根据已知条件联合求解未知参数。
1.2 集中质量法
将管线离散成一系列无质量的直弹簧和质量节点[13],坐标系见图3,动力分析控制方程为

式(6)中:M为质点质量;Ajj为质点的附加质量;为微段所受外力。
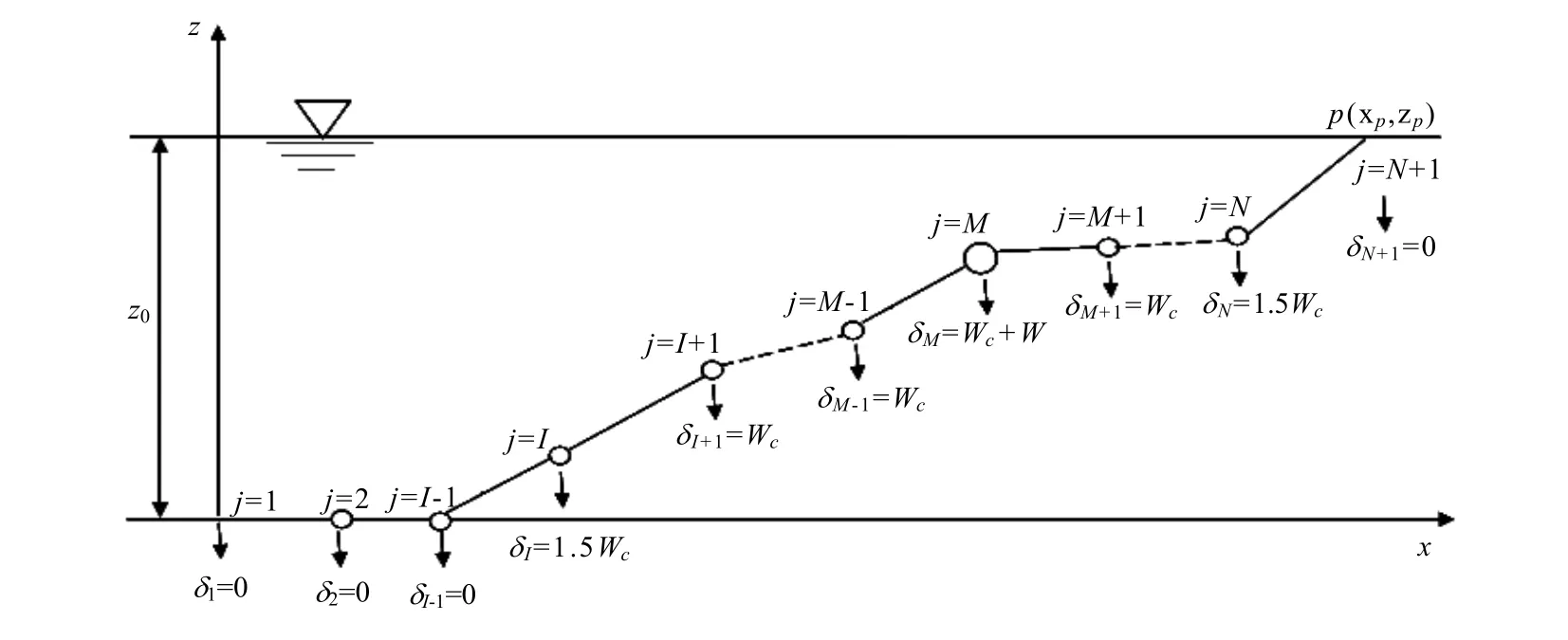
图3 集中质量法坐标系
采用Morison公式求解流体拖曳力,有

系泊线动力方程为

式(10)中:fn为法向流体力;fτ为切向流体力;为湿重;I为惯性力。通过数值积分,求解系泊线时域动力方程组可得系泊线张力。
1.3 总体运动方程
SPAR平台及其系泊系统总体运动方程为

式(11)中:M为平台质量矩阵;c为阻尼矩阵;k为刚度矩阵;Fs为流体静力;Fwf为波频力;Fsv为波浪低频慢漂力;Fm为系泊力;Fr为立管力;
因此,SPAR平台运动响应可分为风浪流引起的平均位移、差频力引起的慢漂运动和波频力引起的波频运动等3部分[14]。
2 SPAR平台系泊系统设计
2.1 SPAR平台及环境参数
承载系泊系统的主体为立柱式生产平台(SPAR),该平台适用于我国南海海域及墨西哥湾海域,作业水深为2000m,其主要尺度见表1,模型示意见图4。平台及系泊系统的建模和计算工作由大型水动力及系泊分析软件ANSYS AQWA完成。

表1 SPAR平台主要尺度
在系泊系统工程应用设计过程中,为保证响应的随机性,同时更好地校核设计方案可行性,选取南海百年一遇的海况(见表2)作为设计工况,浪向变化范围为360°,选取8个浪向角。
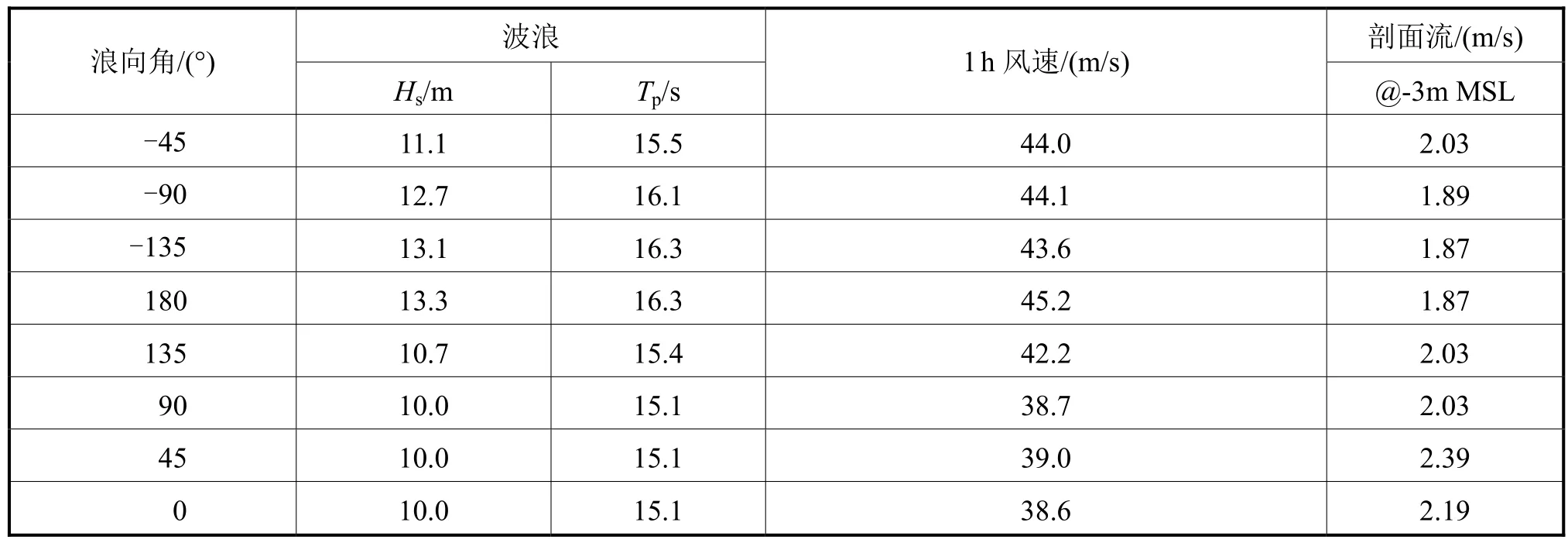
表2 选取南海百年一遇的海况
2.2 坐标系的定义
依据南海的目标环境参数及土壤条件,取两中线面与水线面的交点作为平台局部坐标系的原点O,环境载荷的0°沿着x轴正方向,90°沿着y轴的正方向,环境载荷的方向见图5。
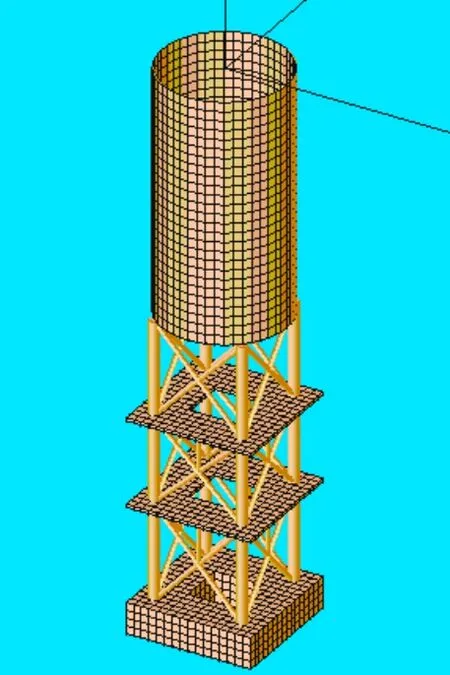
图4 SPAR平台示意
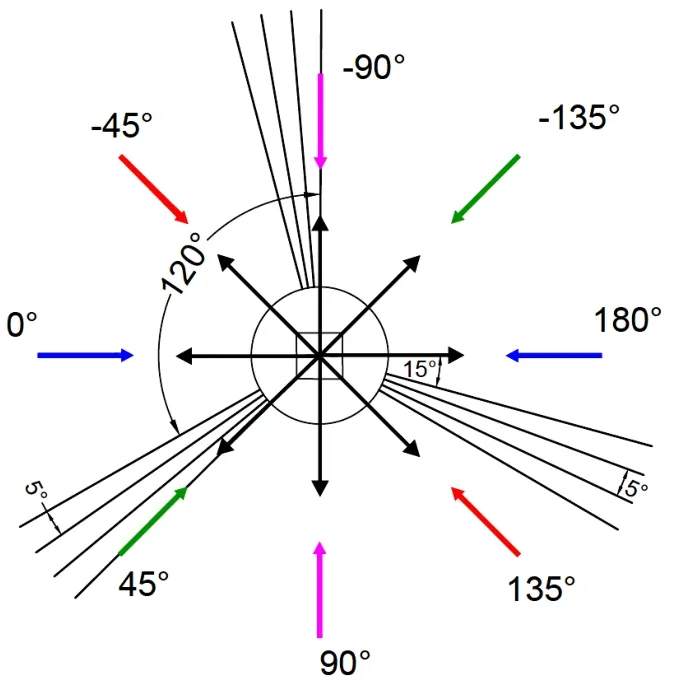
图5 环境载荷方向的定义
2.3 系泊准则及设计流程
依据API RP 2SK规范要求,在设计和分析系泊系统时应考虑完整系泊系统及破损系泊系统2种作业条件。完整系泊系统即所有系泊线均正常工作,保持一定的张力;破损系泊系统指的是一根系泊线断开,其他系泊线均正常工作。系泊系统在完整条件下采用不同分析方法对应的系泊线安全系数要求见表3。

表3 系泊线安全系数要求
根据平台作业海况和规范中系泊准则的限制对系泊系统进行设计,先后分析顶张角、导链器高度、分段长度、直径、根数、布置方式及组内夹角等参数对系泊系统性能的影响,并将这些参数按其对材料成本影响的大小排序,遵循短系泊线长度、低材料等级、小直径和少根数的原则,结合平台布置逐步深入优选方案。为确保2种系泊方式最终的计算结果具有可比性,在设计之初保证2种系泊方式的垂向力相同,平台初始重心垂向位置均为(0, 0, -68.3)。最终选取的设计方案为:导链器高度为-73m,系泊线数量为12根,系泊系统布置形式为3组4根,系泊线组内夹角为5°,2种系泊方式的系泊半径均为1900m。2种系泊线参数见表4,2种系泊方式数值计算模型见图6。
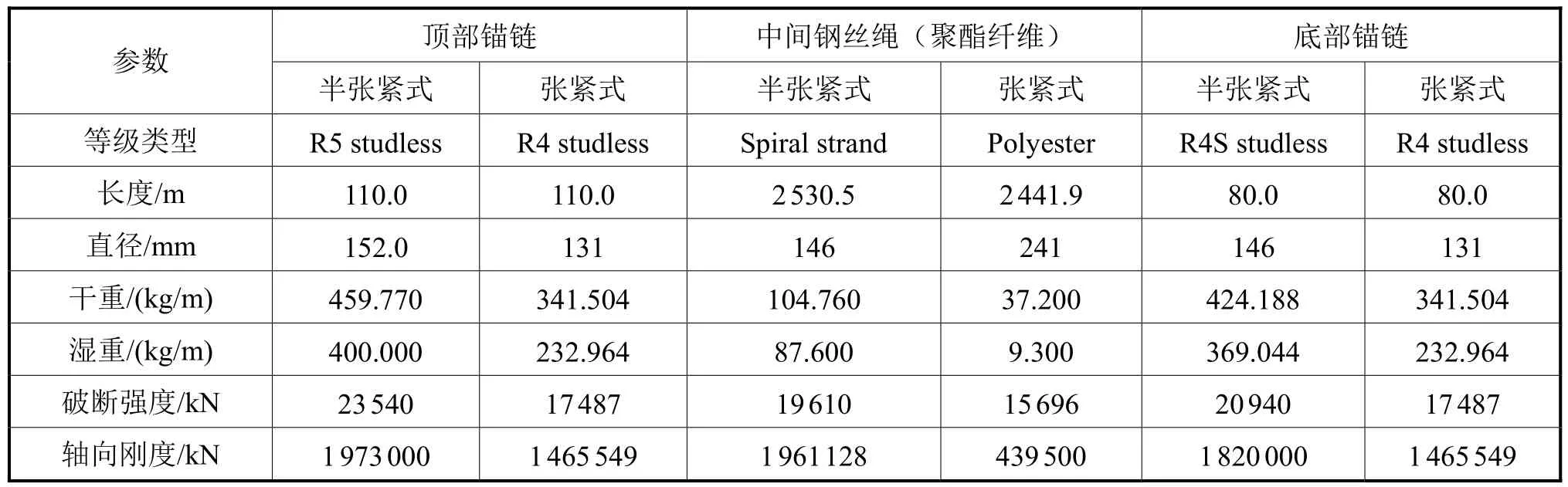
表4 半张紧式系泊线和张紧式系泊线参数

图6 2种系泊方式数值计算模型
3 SPAR平台张紧式与半张紧式系泊方式性能比较
3.1 完整系泊条件2种系泊方式波频及低频计算结果
在8个浪向、2种系泊方式下SPAR平台水平位移的波频及低频极值结果统计见表5和图7。平台的其他4个自由度(垂荡、横摇、纵摇和艏摇)的运动幅值与纵荡和横荡相比非常小,限于篇幅,在此不予列出。
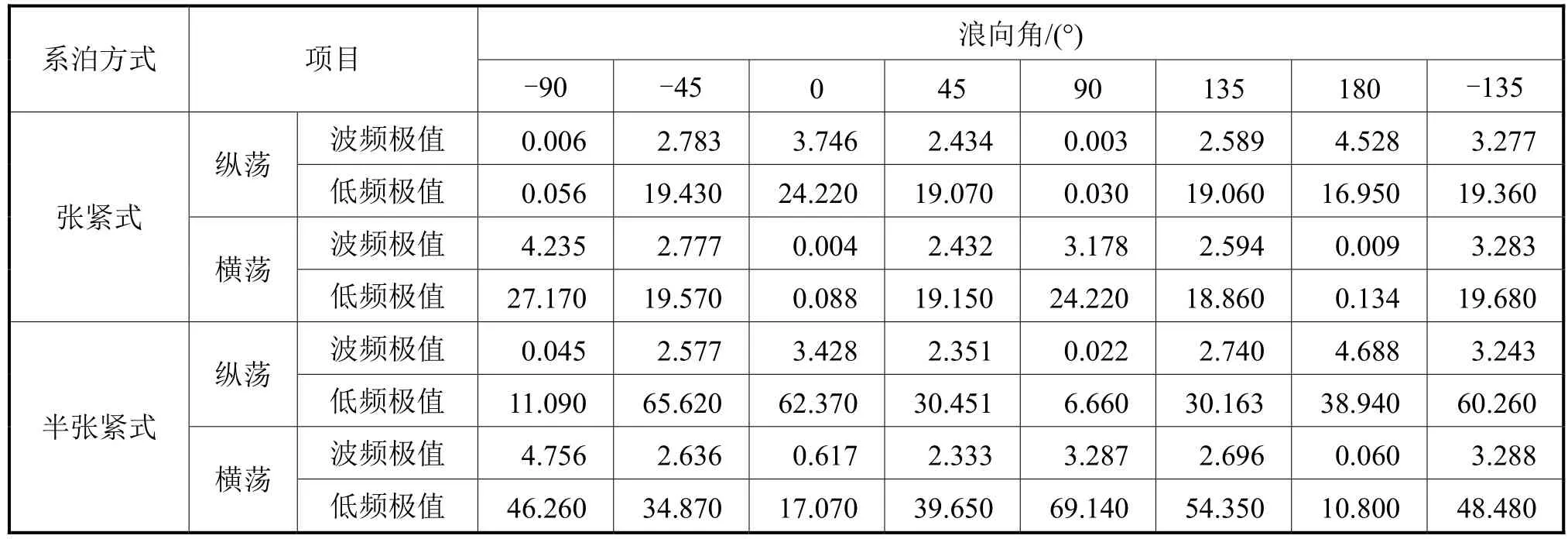
表5 2种系泊方式下SPAR平台纵荡和横荡波频及低频极值结果统计 单位:m
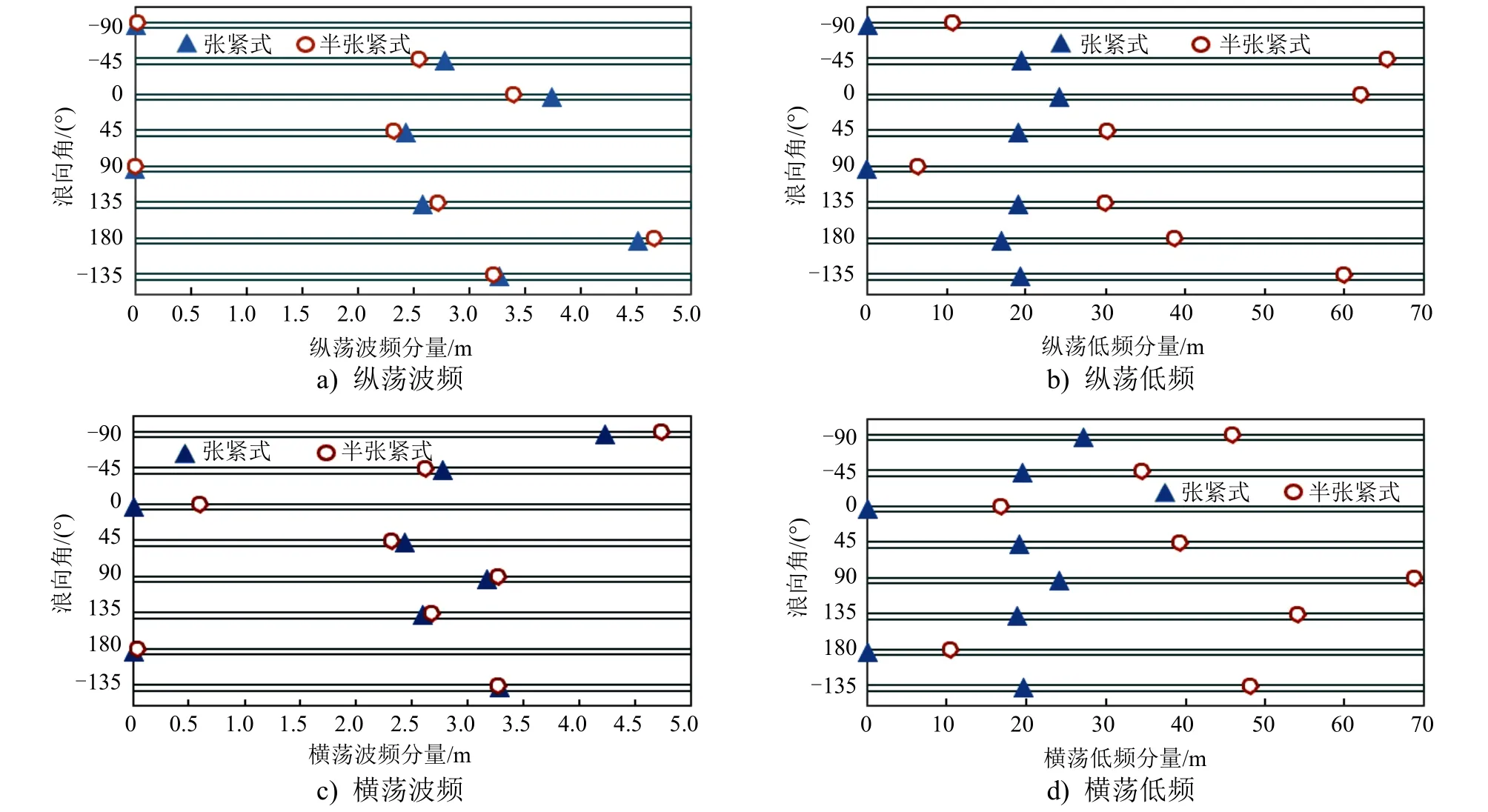
图7 SPAR平台在半张紧式系泊和张紧式系泊方式下的波频及低频结果统计
由以上结果可知:在2种系泊方式中,纵荡及横荡低频分量均占主要部分,且张紧式系泊系统对应的低频分量远远小于半张紧式系泊系统;而2种系泊方式对平台水平位移波频分量几乎没有影响。因此,当SPAR平台在波浪中运动时,平台的慢漂运动以横荡和纵荡为主要的运动方式,波频力的影响远小于慢漂力。
3.2 半张紧式系泊系统和张紧式系泊系统系泊线受力
采用数值计算方式,完成对百年一遇的海况及3种条件下SPAR平台系泊系统的时域耦合分析,得到平台运动响应及系泊张力等结果;同时,将其与规范相对比,校核平台及系泊系统在各种工况下的安全特性。南海目标海域百年一遇的海况下8个浪向对应的系泊线张力计算结果见表6。
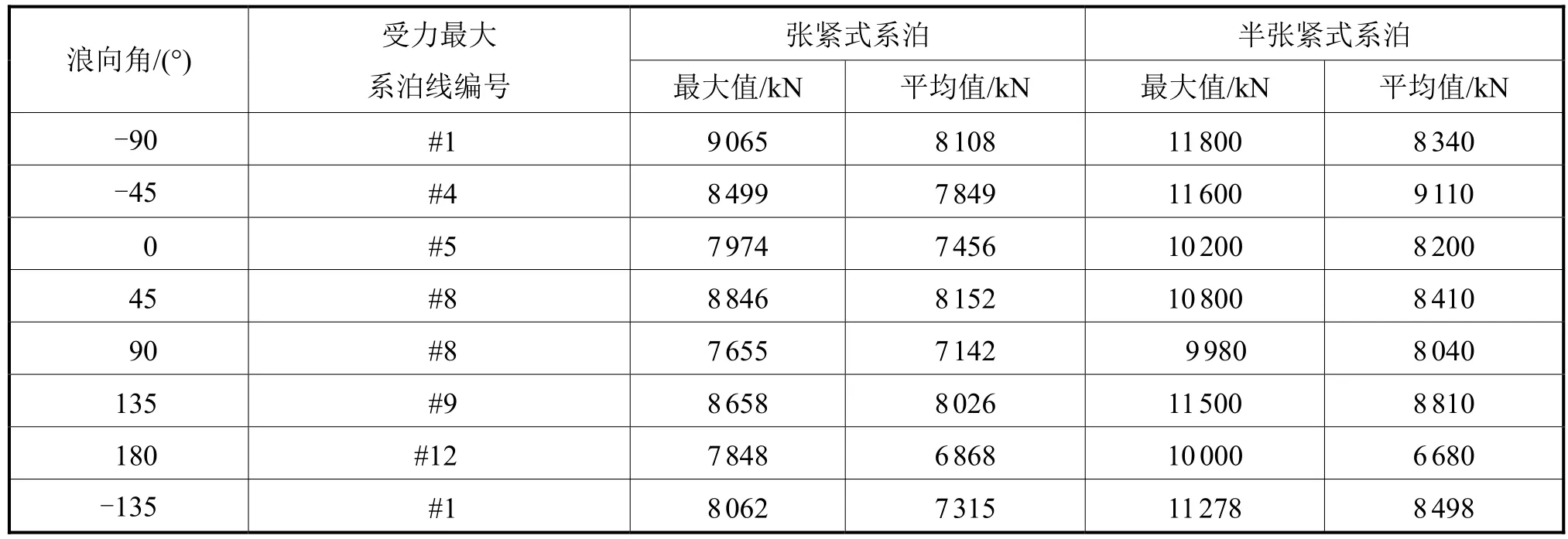
表6 2种系泊方式下不同浪向角对应的系泊线张力计算结果
由表6可知,半张紧式系泊系统系泊线的张力极值均大于对应的张紧式系泊系统系泊线的张力极值。
3.3 半张紧系泊系统和张紧式系泊系统运动情况
在完整系泊条件下,SPAR平台采用张紧式系泊系统和半张紧式系泊系统在2种海况中的水平运动轨迹见图8,其中:粗实线部分为采用张紧式系泊系统时在不同浪向下以平衡位置为初始位置稳定区域的3h的运动轨迹;其余线条所示为采用半张紧式系泊系统在不同浪向下以原点为初始位置3h的运动轨迹。
计算系泊系统在完整系泊、不同浪向角下2种系泊方式的水平位移情况,张紧式系泊系统的水平位移为30.04m,半张紧式系泊系统的水平位移最大值为73.71m,可见张紧式系泊系统的水平位移远小于半张紧式系泊系统,且张紧式系泊系统可有效减小平台水平位移半径极值50%以上。
SPAR平台采用张紧式系泊系统或半张紧式系泊系统其在稳定区域的轨迹均偏离环境载荷方向,采用半张紧式系泊系统时轨迹偏离的程度相比采用张紧式系泊系统时大得多,且均在一根系泊线失效的情况下偏离加大。这是由于系泊线在张紧条件下可较好地平衡风浪流载荷力矩,同时能更好地控制平台低频慢漂运动。
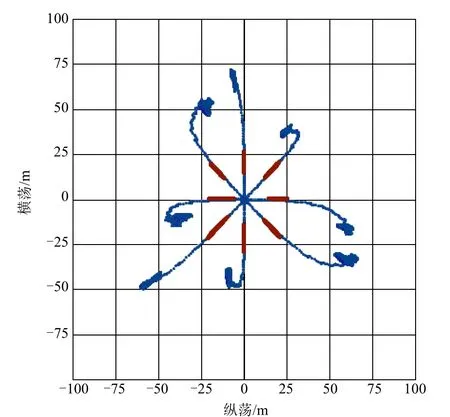
图8 平台3h水平运动轨迹图
4 结 语
本文采用百年一遇的南海海况计算得到作业水深为2000m的SPAR平台系泊系统的动力响应和平台运动响应结果,发现系泊系统受力呈明显的低频特性,波频分量基本上无变化。对采用2种系泊方式的SPAR平台水平位移轨迹进行叠加处理,在相同工况下对比平台的运动响应,结果表明,在各浪向下SPAR平台采用张紧式系泊系统的水平偏移远小于采用半张紧式系泊系统的相应值。张紧式系泊系统抵抗环境载荷的能力更强,能更好地控制SPAR平台的低频慢漂运动。
1) SPAR平台在2种系泊方式下横荡及纵荡运动过程中,其低频分量占主导地位。张紧式系泊系统对应的低频分量远小于半张紧式系泊系统。
2) 在南海百年一遇的海况下,在保证SPAR平台的初始垂向位置一致(即半张紧式系泊和张紧式系泊的垂向力相同)的情况下,半张紧式系泊系统的张力极值普遍大于对应的张紧式系泊系统的张力极值。
3) 在分析SPAR平台的位移情况时,由于张紧式系泊系统可在较好地平衡环境载荷力矩的同时更好地控制低频慢漂运动,因此张紧式系泊系统对应的轨迹偏离较半张紧式系泊系统小得多,且均在一根系泊线失效的情况下偏离加大。
4) 在不考虑系泊系统经济效益的情况下,合理的张紧式系泊系统更适用于在深水作业的SPAR平台。
猜你喜欢
中国德育(2022年12期)2022-08-22
上海理工大学学报(2022年3期)2022-07-13
少儿科技(2022年4期)2022-04-14
船海工程(2020年3期)2020-07-31
学生天地(2020年31期)2020-06-01
江苏船舶(2019年2期)2019-06-26
价值工程(2019年36期)2019-01-11
中华诗词(2018年4期)2018-08-17
水运管理(2017年11期)2018-01-02
科技经济市场(2017年2期)2017-05-22
