
迎面会车二维气动仿真模拟研究
2018-08-22 02:14:10唐洪涛苗秀奇陈广厚董林源
天津科技大学学报 2018年4期
唐洪涛,苗秀奇,陈广厚,董林源
(天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津科技大学机械工程学院,天津 300222)
在两条相邻车道上相反方向行驶的汽车会发生交汇,尤其是在公路车道之间没有隔离带、行车速度较快的一级公路或者是在车速较慢、车道间距较小的三级公路,会车时车身周围的压力场会不断发生变化,可能会使得汽车发生偏转,对汽车的操作稳定性和安全性有着严重的影响.
汽车会车过程中,两车相对位置不断发生变化,会在车身周围形成不定常的涡流,从而导致汽车在会车时发生车头偏转.特别是两车之间的横向间距较小时,会使侧向力发生很大变化.
目前从空气动力学方向分析汽车高速、小间距会车过程的研究较少,多数是对单一运动或者是单一车辆的研究分析,或者是对不同工况下超车模型[1–2]的研究.傅立敏等[3]在轿车并列行驶湍流特性的数值模拟中得出:并列行驶的安全距离应该在单倍车宽与0.5倍车宽之间;张英朝等[4]在轿车会车时气动特性的数值模拟中指出:会车达到稳定时,车身表面压力分布和单车 SAE模型表面压力分布基本一致;张英朝等[5]还对简单外形汽车隧道中会车过程中瞬态空气动力学数值模拟,得出会车过程中气动力系数有类似正弦函数的变化曲线;在国内外研究的基础上,徐国英等[6]在基于 CFD的汽车迎面会车过程气动干扰特性仿真研究中得出:侧向力和横摆力矩的变化趋势基本相同;谷正气等[7]在会车瞬态气动特性分析与研究中表明,两轿车会车时的气动阻力系数为负正弦函数变化,且与侧向力的变化不同步;杨敏[8]进行车辆会车动态模拟,表明二维动态会车过程中使棱角结构光顺及减小会车速度可削弱压力波,促进行车安全.
上述研究成果中的变量大多数都是单一的,但通常来说,汽车会车是一个间距和速度共同影响下的过程,而且对于会车网格选择,动网格技术比滑移网格更加适用,同时随着行车速度不断提高,超速会车开始增多.因此,本文在上述研究的基础上,采用动网格技术,对不同速度、不同间距、不同车型以及超速下的会车过程进行数值模拟,选取几个会车过程的离散位置作为研究对象,结合瞬态压力云图、速度矢量图和气动力变化曲线,重点分析会车过程中的气动力变化、流场变化,从中得出相关规律.
1 数值模拟
1.1 基本控制方程
本文选用的汽车行驶速度不超过 100,km/h,马赫数约为 0.081,7,小于 0.3,因此可以认为此时气体是不可压缩的[9].其基本控制方程为
当控制方程为x方向动量方程时,可以变换为
当控制方程为y方向动量方程时,可以变换为
当控制方程为能量方程时,可以变换为
式中:ρ为空气密度,取值为 1.184,15,kg/m3;u、v分别为 x和 y方向的速度矢量;p为压力;µ为动力黏度系数,取值为 1.789,4×10–5,kg/(m·s);k为常数.
1.2 原始模型
选用国产某款运动型多用途汽车(SUV),该款车的外形尺寸为:长 4,325,mm,宽 1,765,mm,高1,625,mm.基于模型尺寸选用计算域尺寸为:长60,m,宽 20,m.把该款 SUV 简化成二维模型,车头棱角作平滑处理.如图1所示.
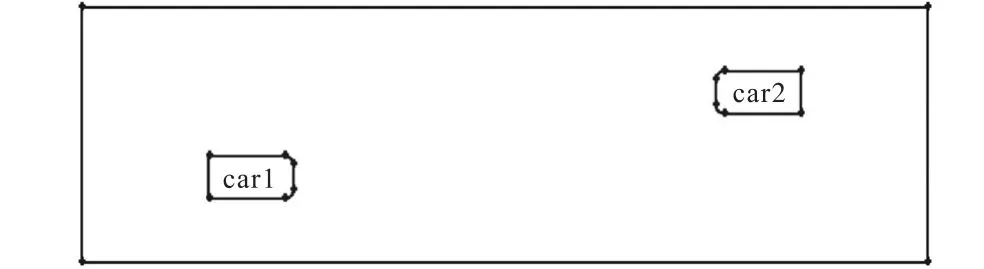
图1 计算域Fig. 1 Computational area of the model
1.3 网格划分
模型采用三角形非结构网格,由于是二维会车分析,故把两车简化为近似小矩形块,分别命名为 car1和 car2(左下角为 car1,右上角为 car2),面网格尺寸设为0.5,计算域网格尺寸设为2,如图2所示.
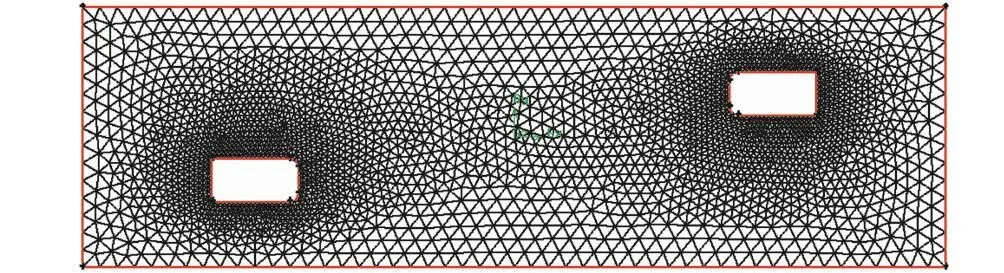
图2 网格模型Fig. 2 Mesh model
1.4 边界条件
计算域左侧设置为压力入口,右侧设置为压力出口,两车壁面条件设置为wall,计算采用K-epsilon湍流模型,求解器选用非定常求解器,动网格参数Mesh Methods选用Smoothing和Remeshing,Smoothing中Spring Constant Factor(刚度系数)设置为 0.05,Remeshing中选用Size Function(尺寸函数)和 Must Improve Skewness(必须改善畸变率)[10],该设置的目的是为了得到较好的网格更新,在保证原来尺寸不变的前提下,使局部网格重新划分.
2 会车方案设计
根据2014年9月20日发布的新版公路工程技术标准[11]:一级公路在不受限制的情况下,可不设中间隔离带,在设计速度100,km/h的路段,车道宽度为3.75,m,两车处于车道正中间会车时,两车之间的距离约为 2,m;三级公路在设计车速为 40,km/h的路段,车道宽度为 3.25,m,两车在车道正中间会车时,两车间距约为1.5,m.
设置两车以相同速度向相反的方向行驶,最大行车速度选用一级公路和三级公路的设计速度上限,并在速度上限下调20,km/h的范围内变化,即一级公路的行车速度范围为 80~100,km/h,三级公路的行车速度为 20~40,km/h.设置一级公路的会车间距为1.5~2,m;三级公路的会车间距为 1~1.5,m.方案见表 1.
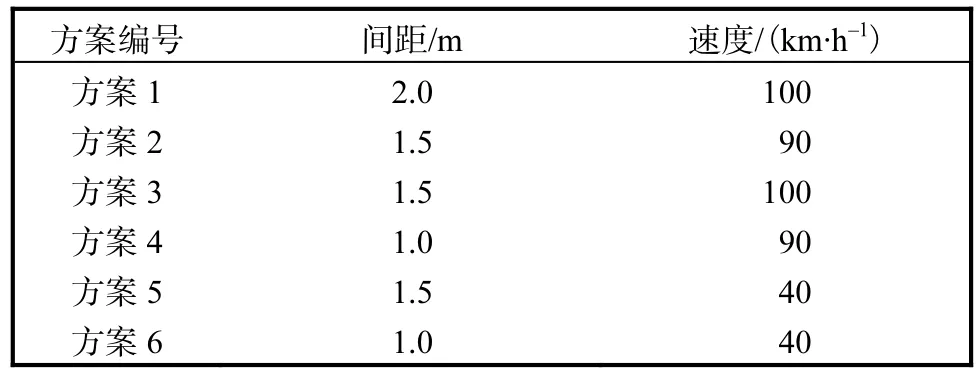
表1 设计方案Tab. 1 Design proposals
3 结果分析
3.1 压力云图
因为两车模型选取相同,且会车速度相同,因此车身周围的压力分布相同.设 D为两车头之间在行驶方向的距离,L为车身长度,D/L描述了不同会车状态.以方案 3为例,分析会车过程中两车外流场之间的相互干扰特性和气动特性随两车相对位置 D/L的变化,结果见图3.
由图3可以看出:在两车开始相会(图3(a)),即D/L=-1时,car1的高压区逐渐向 car2靠近并交汇,开始互相影响,car2靠近car1一侧的压力明显高于远离 car1的一侧(开放侧),car2车头部会产生远离car1车头的侧向力,并且侧向力逐渐增大,增大到最大时可能会使车体偏离行驶方向,对汽车的稳定性造成影响.
当两车车头平齐(图 3(b)),即 D/L=0时,由于车头高压区的相互作用产生侧向作用力,此时负向侧向力会达到最大.
当两车处于并列平行状态(图 3(c)),即 D/L=1时,由于两车之间的间距面积变得很窄,所以气流流动速度迅速增大,在两车之间形成很高的负压区,借助负压区的作用使两车有着相互吸引的趋势,正向侧向力会达到最大,此时发生交通事故的概率最大.
当两车开始脱离对方(图 3(d)),即 D/L=2时,两车逐渐开始进入对方的尾涡区,由于空气介质具有黏性,所以会利用空气的这种性质互相带动尾部的气流流动,从而使流速加快,气体压力下降[12].
当两车即将完全脱离对方尾涡区(图 3(e)),即D/L=3时,两车相互作用开始减弱,两车侧向力也逐渐减弱,直至减为0.
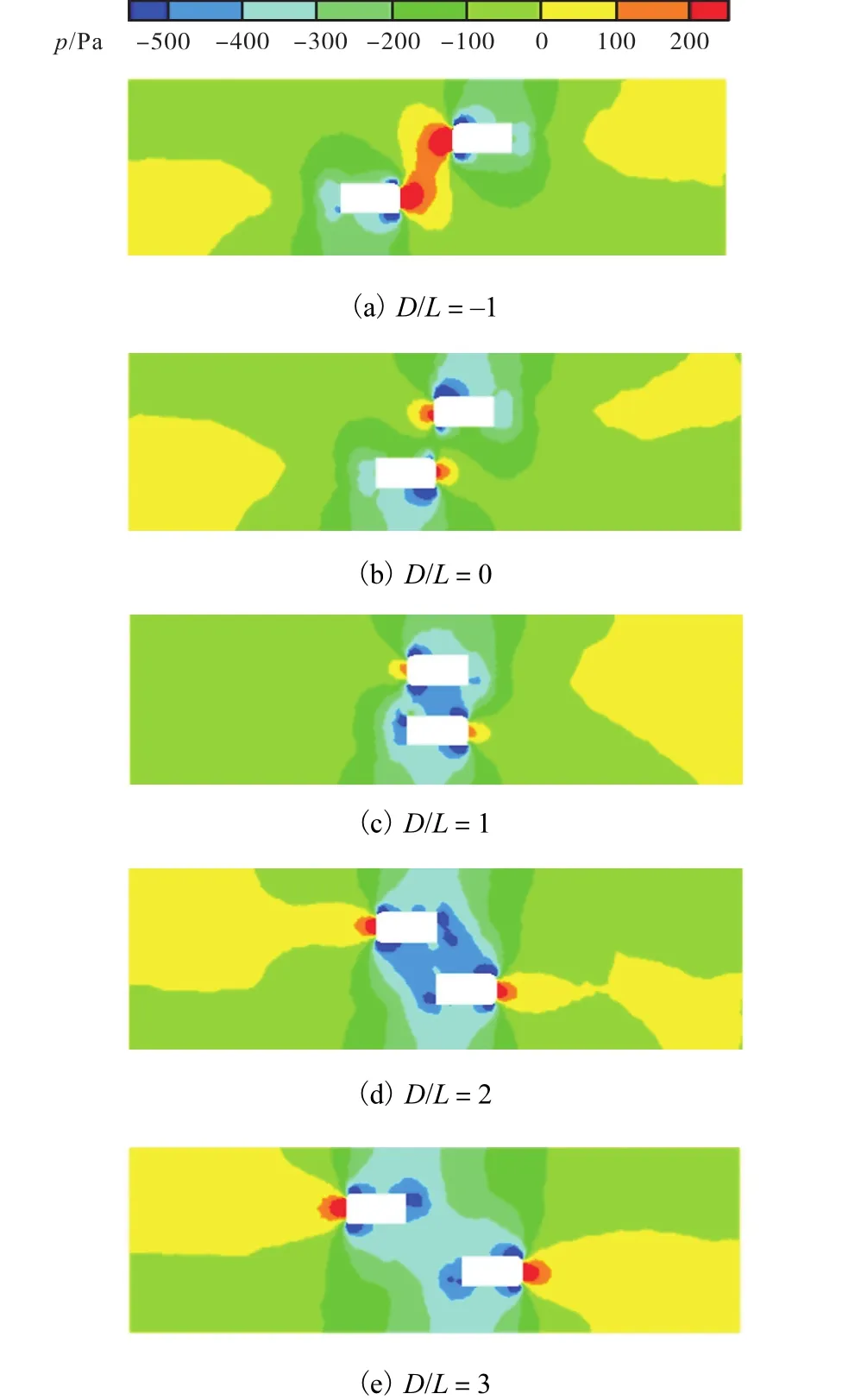
图3 相对位置变化时的压力云图Fig. 3 Pressure contours of different positions
3.2 速度矢量图
运动中的车辆带动周围空气流动,在两车周围形成一个运动流场区域,这些流场区域不断导致汽车的气动力变化,速度矢量图见图4.
会车前(图 4(a)),两车的流场彼此独立,car1和car2近壁面两侧分别存在旋涡,且两侧的旋涡是对称分布的,故两车的行驶是平稳的.
当两车车头平齐时(图 4(b)),car1干扰侧流场和 car2干扰侧流场开始交汇,car1干扰侧涡流方向为逆时针,car2干扰侧涡流方向也为逆时针,方向相同的涡流相互作用产生排斥力,使得干扰侧作用力增强,两车有偏离彼此的倾向.
当两车平行对齐时(图 4(c)),干扰侧的涡流位置、个数以及涡流强度都发生了变化,从而改变了两车间隙处的流场.car1干扰侧产生的涡流和 car2干扰侧产生的涡流相互融合,使两车之间形成低速旋涡区,涡流集中的地方能量消耗大,同时根据伯努利方程得出,此旋涡区也属于低压区[13],两车有相互吸引的趋势.
两车开始逐渐脱离对方时(图 4(d)),干扰侧交汇气流开始分离,涡的数量增加,位置也发生变化,并且速度梯度也有明显降低,使得相互吸引的作用力减弱.
通过对比图 4(a)和图 4(e)的会车状态发现:会车前和会车后有明显不同,会车后涡流的作用会延续很长一段距离,行车稳定性受到影响,此时也应该注意行车安全.
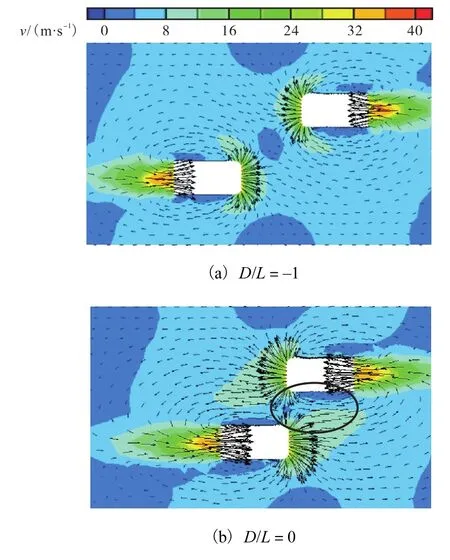

图4 相对位置变化时的速度矢量图Fig. 4 Velocity vector of different positions
3.3 侧向力
在没有其他因素的影响下,单一车辆行驶时,所受的侧向力几乎为 0,但是在两车会车时,由于两车互相影响,侧向力有明显变化,当相互作用达到一定程度时,两车行驶方向将会发生偏移,从而会引发交通事故.以car1作为研究对象,采用6种方案进行仿真计算,侧向力随着不同会车状态变化情况见图 5,最大值见表2.

图5 car1的侧向力瞬态变化Fig. 5 Transient changes of lateral force
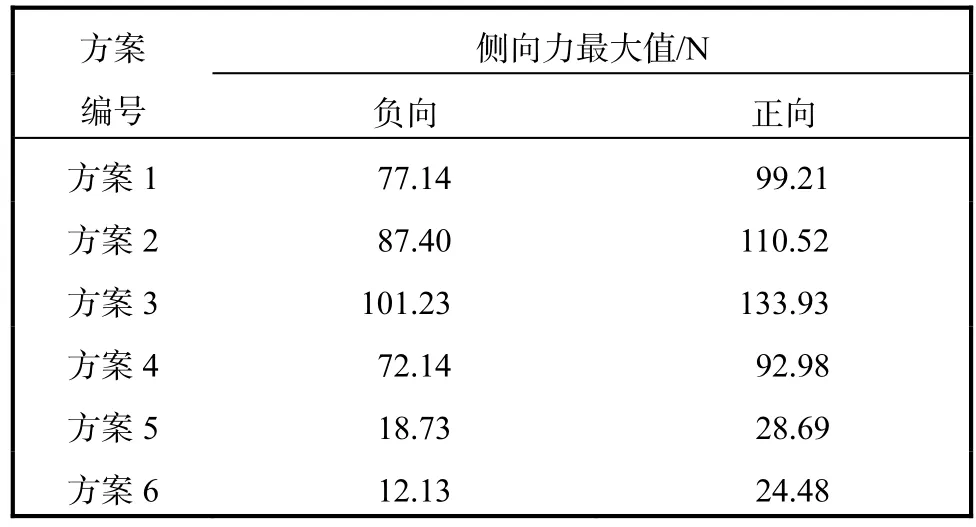
表2 侧向力最大值Tab. 2 Maximum of lateral force
从表2可以看出,所有方案的侧向力数值都比较小.仿真中的行车速度已选用了标准允许的设计速度上限,如果车辆按照新版公路工程技术标准规定速度行驶,行车是安全的.
将方案1与方案3、方案2与方案4进行对比,可以直观地分析间距对侧向力的影响.方案 1的间距比方案 3大 33%,方案 3的负向侧向力和正向侧向力的最大值比方案1分别大31%,和35%.方案2的间距比方案 4的间距大 50%,方案 4的负向侧向力和正向侧向力的最大值比方案 2分别大 21%和20%.这说明小间距高速会车,间距的小范围改变,会使侧向力发生较大变化.
将方案3和方案5进行对比,可以直观地分析速度对侧向力的影响.方案 3的速度比方案 5大 1.5倍,方案3的负向侧向力和正向侧向力的最大值比方案 5分别大 4.4倍和 3.7倍.这说明等间距会车时,高速会车比低速会车使汽车摆动的更加剧烈.
3.4 不同车型会车
选用不同尺寸的会车模型,同样设置两车行驶速度相同,并匀速行驶.左下角命名为 car1;右上角命名为 car2,car1保持原始尺寸,car2尺寸比原始尺寸增大1.5倍.为了便于对比,选择表1中方案3作为会车方案进行分析,分析会车过程中两车外流场之间的相互干扰特性和气动特性随两车相对位置的变化.会车过程的压力云图见图6.
对比图6(a)和图3(b)相同会车状态下的压力云图发现:不同车型会车时两车正压区是不对称的,大车正压区影响范围扩大,说明大车对小车的排斥力增强,由于尺寸、质量都不同,故此时小车会有远离大车的趋势.
对比图6(b)和图3(c)相同会车状态下的压力云图发现:大车和小车平行会车时,两车之间同样也出现很强的负压区,此时的负压区较之前更强,说明两车相互吸引的作用力也得到加强,由于尺寸、质量不同,该作用力对于小车比较明显,小车会在很短的时间内不断靠近大车,很可能直接撞到大车侧面,此时的事故率也最大.
对比图6(c)和图3(d)相同会车状态下的压力云图发现:两车开始脱离对方的影响,带动彼此尾部气流流动,流速不断加快,使得气压下降速度也加快.小车气压下降速度比大车气压下降速度更快,气流分离,使两车之间产生排斥力.
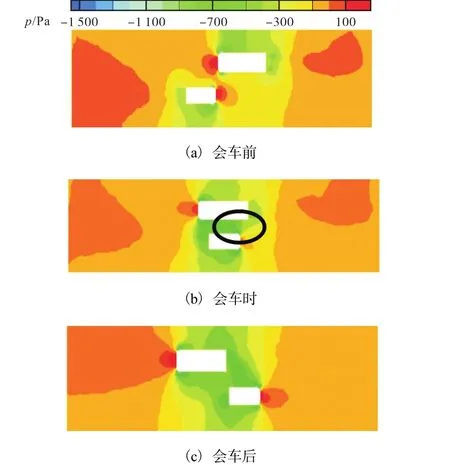
图6 会车过程中的压力云图Fig. 6 Pressure contours of meeting cars
由图7会车过程中的速度矢量图可以看出:此过程中两车也经历排斥、吸引、排斥,不同的是两车的作用力大小不同,速度矢量图的变化和前面分析一致,不再赘述.
不同车型会车采用表 1方案 3,小车(car1)的侧向力瞬态变化曲线见图8.
对比图8和图5中方案3的侧向力变化可知:原方案的同车型会车时,car1的负向侧向力最大值为101.23,N,正向侧向力最大值为 133.93,N,不同车型会车时,car1的负向侧向力最大值为 158.71,N,正向侧向力最大值为 217.03,N,分别增大了 56.8%,和62.0%,.可见,侧向力在不同车型会车时的变化曲线呈现不稳定波动;随着车型尺寸的变化,侧向力也会有相对应的变化,此时更应该注意行车速度和间距,以免出现交通事故.
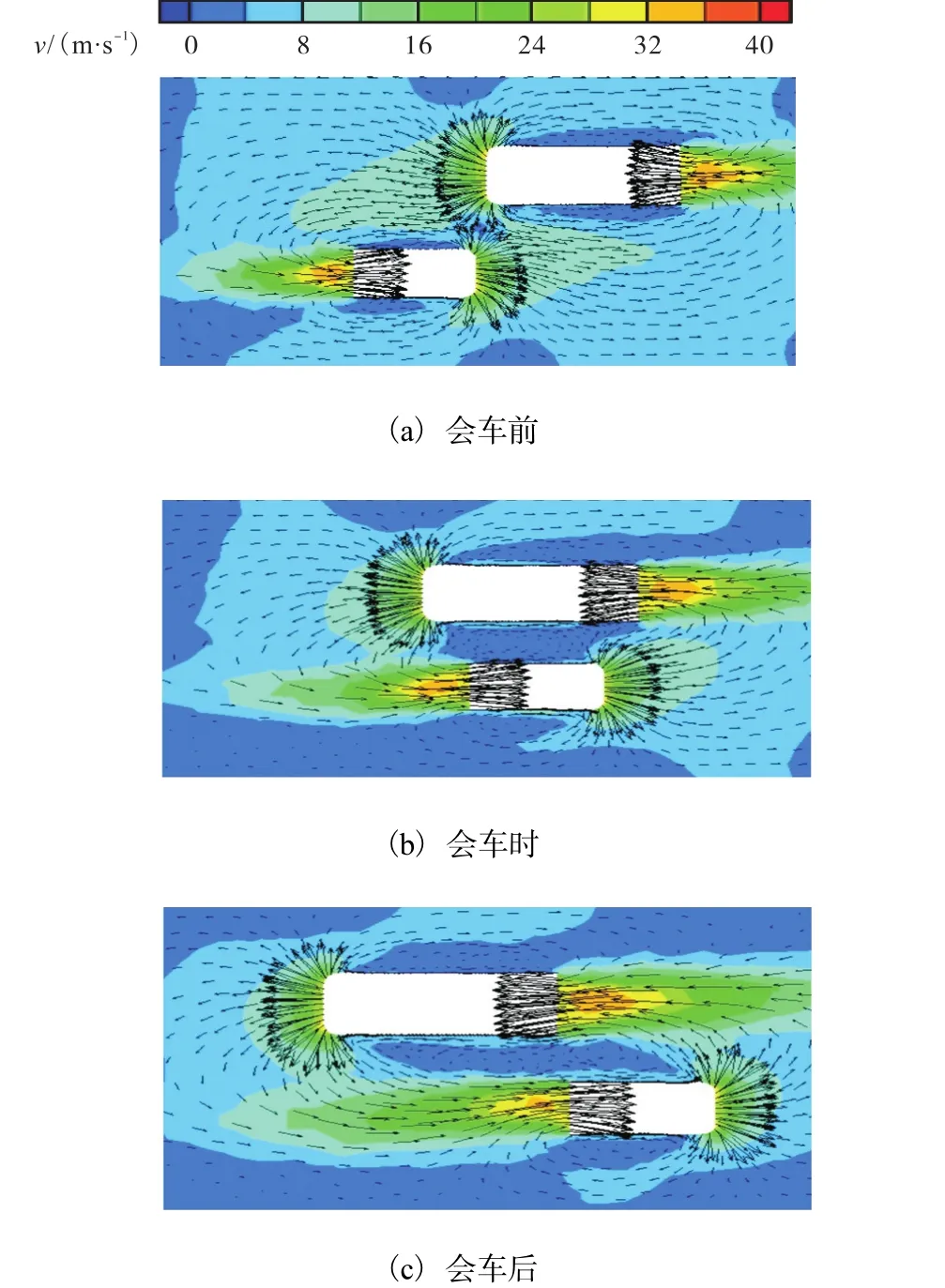
图7 不同车型会车过程中的速度矢量图Fig. 7 Velocity vector of meeting cars
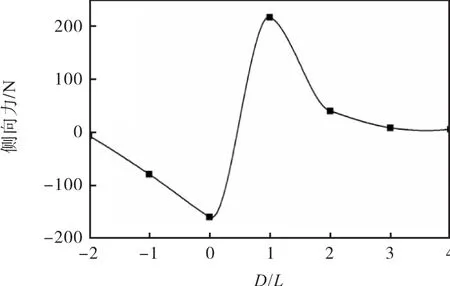
图8 car1侧向力瞬态变化曲线Fig. 8 Transient changing of lateral force of car1
3.5 超速会车
虽然在公路工程技术标准中规定一级公路的最高时速为 100,km/h,但也会出现超速会车情况.本文选用 130,km/h作为会车速度,通过压力云图和速度矢量图分了同车型超速会车情况,仿真模拟结果见图9和图10.
由图9可以看出:会车速度达到130,km/h时,两车之间的负压区更大,两车之间相互影响也越来越大,周围的流场更加复杂,两车在会车瞬间吸引力更大,说明超速会车危险系数大.
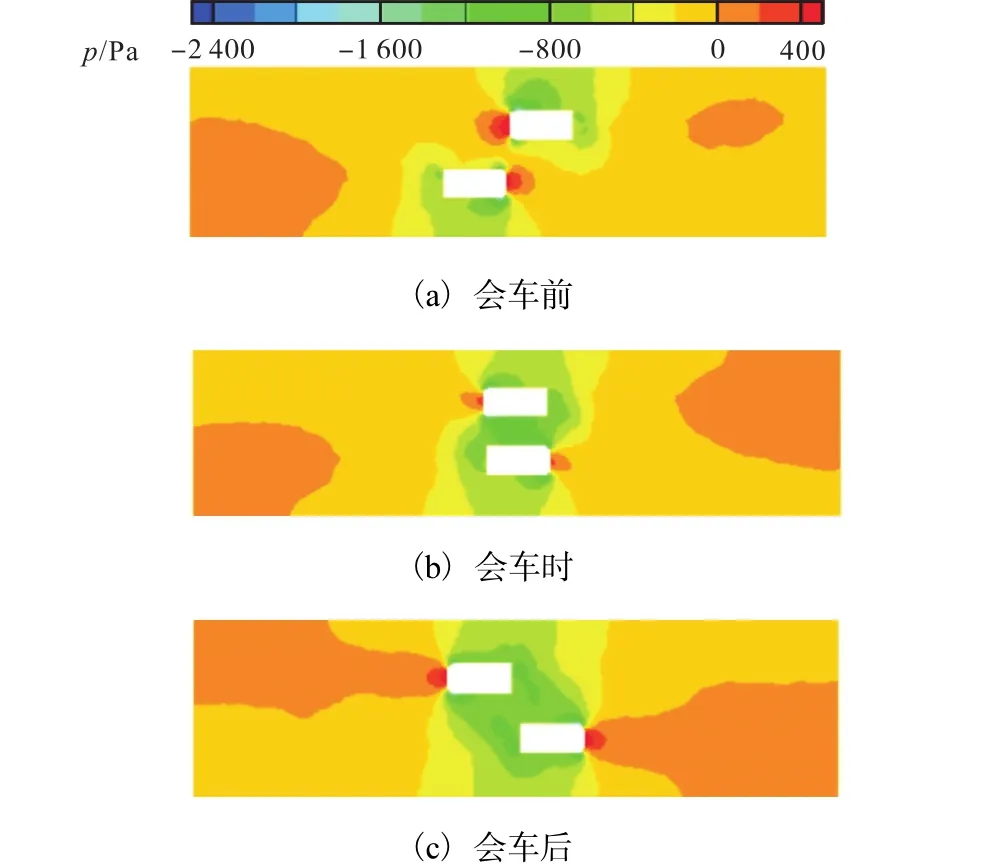
图9 超速会车过程中的压力云图Fig. 9 Pressure contours of overspeed meeting
由图 10可以看出:两车之间形成超低速旋涡区,由于涡流越集中的地方能量消耗越大,故借助超低速旋涡区,两车相互吸引的作用力会变得非常大,car1最大侧向力达到 464.5,N,比相同间距、会车速度为 100,km/h时的最大侧向力(133.93,N)增大了2.47倍,发生交通事故的概率大大增加.
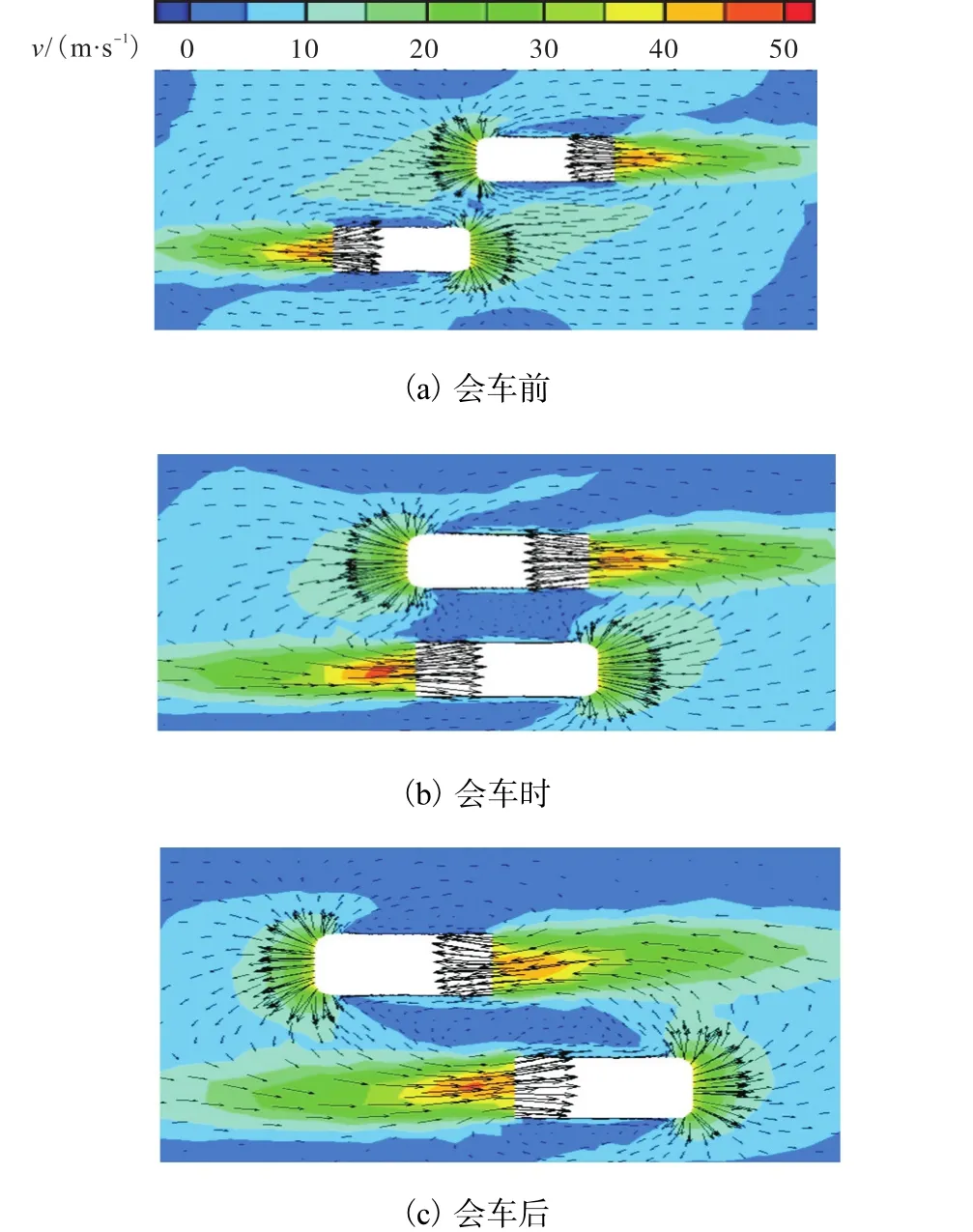
图10 超速会车过程中的速度矢量图Fig. 10 Velocity vector of overspeed meeting
4 结 论
(1)会车过程中压力场和侧向力随着两车的位置发生变化,侧向力在会车前后会呈现不稳定波动变化,改变速度和间距,侧向力变化趋势基本相同.
(2)在会车过程中,侧向力会发生正负变化,同时伴有极值出现,侧向力正向最大值出现在两车身平行时,负向最大值出现在两车头平齐时,导致两车左右摇摆,行车安全受到威胁.
(3)不同车型会车时,侧向力会随着车型的改变而发生改变,变化和车型尺寸存在一定关系.在行车过程中,当两相同车型或者不同车型会车时,为了提高行车安全,会车速度应该减小.
(4)当会车速度达到一定程度后,继续增大车速度会导致侧向力急剧增大,超速会车危险系数急剧升高.
猜你喜欢
长江大学学报(自科版)(2022年1期)2022-02-25 03:24:24
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
装备制造技术(2020年11期)2021-01-26 00:39:12
通信电源技术(2018年5期)2018-08-23 01:16:00
教育教学论坛(2017年34期)2017-08-30 10:32:04
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
西北工业大学学报(2015年1期)2016-01-19 03:29:56
汽车科技(2014年6期)2014-03-11 17:46:08
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:09
