
基于全站仪及Lensphoto系统复杂地形影像图测绘研究
2018-08-08 01:47刘帅兵景海涛
测绘工程 2018年9期
刘帅兵,景海涛
(河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
近景摄影测量作为测绘学的分支,在一些传统测绘工作辅助测量方面发挥着作用。非接触性的近景摄影与传统测量工作相比,只需要少量的控制点即可进行数据采集处理工作,可以在短时间内获取目标地物大量的几何信息与物理信息,给测绘工作带来新的测量方法。随着多基线近景摄影测量的研究深入,使得非量测数码相机在近景摄影测量中实现了越来越广的应用,测量成本逐步降低、自动化程度提升明显、工作效率大大提高。多基线近景摄影测量可获取高精度的影像,弥补传统航测的缺陷,减少成本缩短作业周期,可以实现更高效的摄影测量[1]。多基线数字近景摄影测量技术很大程度上改变了传统近景摄影手工测量的方式,使近景摄影测量技术产生了质的飞跃,是一项应用前景广阔的测量新技术[2]。
本研究区别于传统多基线近景摄影测量,如袁清洌、吴学群[1]等学者的研究,依靠远小于传统测绘所需要的测量控制点,布设三等测量控制网,采用高精度控制测量的方式进行量测,将影像控制点的精度误差控制在毫米级。利用多基线数字摄影测量的方法,生成测区数字模型如点云数据及三维景观图,成图效率较高、精度可靠。依靠多基线数字近景摄影测量自动化系统Lensphoto,可在短时间内对普通数码相机进行标定,降低了摄影对于硬件的需求,同时由于所需控制点的减少,所需要的摄站数也随之减少。在一些诸如悬崖等垂直角大,测绘人员难以企及的特殊测区,可以只对一些影像上的特征地物进行特征点的标定,提高了工作的效率,实现快速成图、简单拍摄、全自动化内业处理,在极短时间内得到所需要的生产成果。
1 Lensphoto系统测绘原理
1.1 Lensphoto系统简介
Lensphoto系统的原理是利用计算机多目视觉来代替人眼的双目视觉以测定影像的同名像点,通过影像间同名点进行匹配的,并利用少量外业测量的影像控制点进行航带的绝对定向,在重叠影像之间通过前方交会求解待定点的坐标,有利于提高影像解算的精度和可靠性,相对于传统双目视觉中物点由两条光线交会扩展到多条光束交会,增加多余观测次数,消除了单基线立体像对重建三维空间的问题[3]。短基线、大影像重叠度相邻光束所构成的交会角较小,有利于提高自动匹配的精度,首尾光束构成的交会角有利于提高物点的解算精度[4]。
Lensphoto系统利用非量测数码相机来获取多基线影像,然后利用近景多片影像匹配算法的原理,获取大量的同名特征点,完成从自动空三测量到测绘各种不同比例尺的线划地形图的生产,以及对普通数码相机采集的影像资料进行快速精密三维重建[5]。通过拍摄多组相片,应用Lensphoto系统按多基线近景摄影测量的方法解算,可以进行小区域大比例尺测图,得到点云图、数字线划图等成果[1]。Lensphoto系统在技术上与传统近景摄影测量相比较有很多技术创新点。它把多基线摄影方法引入到了近景摄影测量中,同时引入了新的旋转多基线摄影方法获取影像数据,并且还引入了全新的影像匹配的算法,有效地解决了被摄地物在空间位置分布不连续或有断裂和遮挡的复杂影像,实现了从传统的依靠人眼视觉转到真正依靠计算机视觉自动化处理的跨越。它还将自动空中三角测量与区域网平差引入到近景摄影测量,使得多基线近景摄影测量有了很高的精度以及自动化程度,使近景摄影测量发生了飞跃式发展[6-7]。
1.2 多基线平行摄影与多基线匹配
近景摄影测量中基本摄影方式有正直摄影方式和交向摄影方式,本次试验采用交向摄影的方式。在摄影时,像片对两像片的主光轴大体位于同一平面但彼此不平行,且不垂直于摄影基线,在特定的安排下,两主光轴可以相交于一点,其角度成为交向摄影的交汇角。用点投影系数方法计算像点的物方空间坐标[8-9]。接着利用光束法前方交会把待定点的像点坐标作为观测值进行求解,并挨个逐点通过迭代解算最终可以求得待定点的物方空间坐标值[10-11]。
平行多基线摄影测量与传统近景摄影测量的方法一致,在摄影时保证各个影像相片的主光轴彼此平行,基于此种方式,可以较为简单的进行测区的拍摄以及航带的布置。在进行平行多基线摄影时候,要保证影像之间的重叠度至少在2/3以上,并且同一摄站的影像也最好不要超过9张。在遇到一些测区较大的情况时,利用平行摄影的方式可以较为方便的对整个测区进行测量工作, 拍摄以及航带的布置如图1所示。
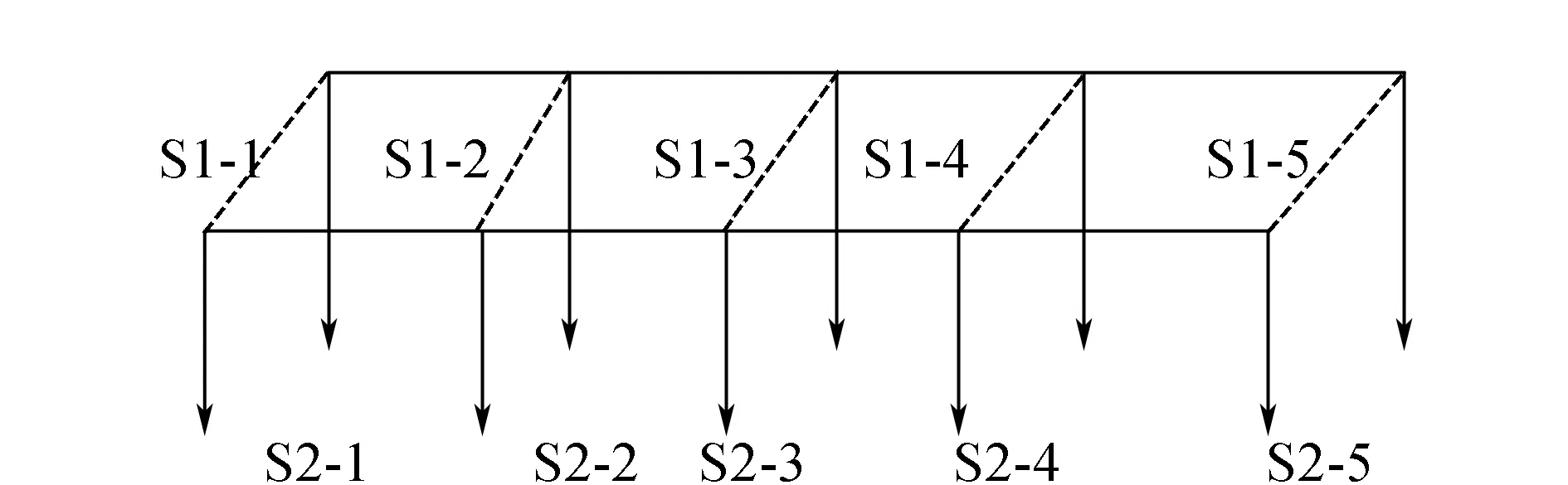
图1 “航带网”摄影的方式
1.3 多基线旋转摄影与多基线匹配
旋转多基线数字近景摄影测量将区域网三角测量应用在近景摄影测量上,通过旋转多基线摄影方式提高了近景摄影测量交会精度,解决在近景测量中遇到大交会角时,自动化匹配难以实现的问题,突破了单模型和非量测数码相机进行直接线性变换求解影像的外方位元素的工作技术流程。
旋转多基线近景摄影测量所用相机一般为非量测单反数码相机,像幅都很小,摄影原理如图2所示。通过增加摄影的基线长度,保证影像之间有3°以上的重叠,确保测区自由网能够顺利建立。但随着摄影基线及交会角的情况增加,使得所拍影像间的变形明显,降低影像匹配的正确率、可靠性,甚至会导致影像的匹配失败的解惑[12]。因此,制定测区摄影测量方案,设计合理的摄影角度以及摄站位置的选取尤其重要。
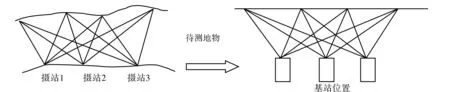
图2 旋转摄影拍摄原理
2 数据采集与处理
2.1 数据采集
数据采集方法上,相较于袁清冽,吴学群[1]学者影像控制点布设方式数量少(14个),测区范围大(30张影像),本研究采用全站仪实行控制测量,快速采集高精度的测量控制点(40个),采用旋转摄影的方式摄影(5张影像),在小型区域进行TIN模型的建立,影像匹配重叠度高(4°重叠度),提高了内业影像匹配的精度。
以某人工湖泊为实验区,利用城镇一级导线点,布设三等测量控制网,采用ES-600G型全站仪进行测区控制点的量测,导线闭合差为(+0.003,-0.002)符合测量精度要求。采用数码相机Canon 450D进行测区影像控制点的采集,在测量控制网的基础上布设了40个影像控制点,提高内业影像匹配精度采用手持棱镜碎部测量的方式进行量测。
进行摄影前,在像控点上设置A4纸打印的摄影人工标志,人工标志见图3,内业数据处理时见图4,影像控制点的实际效果图。实验采用多基线旋转摄影的方式进行地物信息的采集,在测区对面4层建筑平台,设立单基站进行地物信息的采集。
图3 纸质A4人工绘制

图4 影像上的实际效果
2.2 内业数据处理
1)相机检校:预设的格网影像保存,以*.GrdInfo的格式输出,利用Lensphoto系统自带的相机检校模块进行自动处理。相机焦距为无限远,模式为手动变焦,计算机液晶显示屏调整为出厂分辨率,设置格网大小,手持相机在计算机屏幕前方空间的五个方向交向摄影五幅格网影像数据进行相机校准,得到相机参数文件,图5为相机检校影像。

图5 相机检校图
2)空三匹配:添加一个航带(见图6),将含有测区信息的航片信息数据以及相机参数导入到lensphoto系统之中,进行影像畸变改正、基础空三匹配,在相邻的两张影像上,进行同名像点的选取,经过各个模型的检查与校准,最后完成全自动匹配。
由于测量数据是在全站仪中得到的,无法获取 *.ctl (Lensphoto软件可以识别的控制点文件)文件,可以将全站仪中的数据导出之后进行数据格式转换。
3)空三交互:空三交互的主要功能在于对控制点的量测以及对空三匹配结果的编辑修改等。在实验中系统会自动进行金字塔影像的生成,之后加载匹配结果,影像匹配图中可以清晰地看到连接点的分布图见图7,接着进行测区控制点影像匹配。

图6 新建航带模型
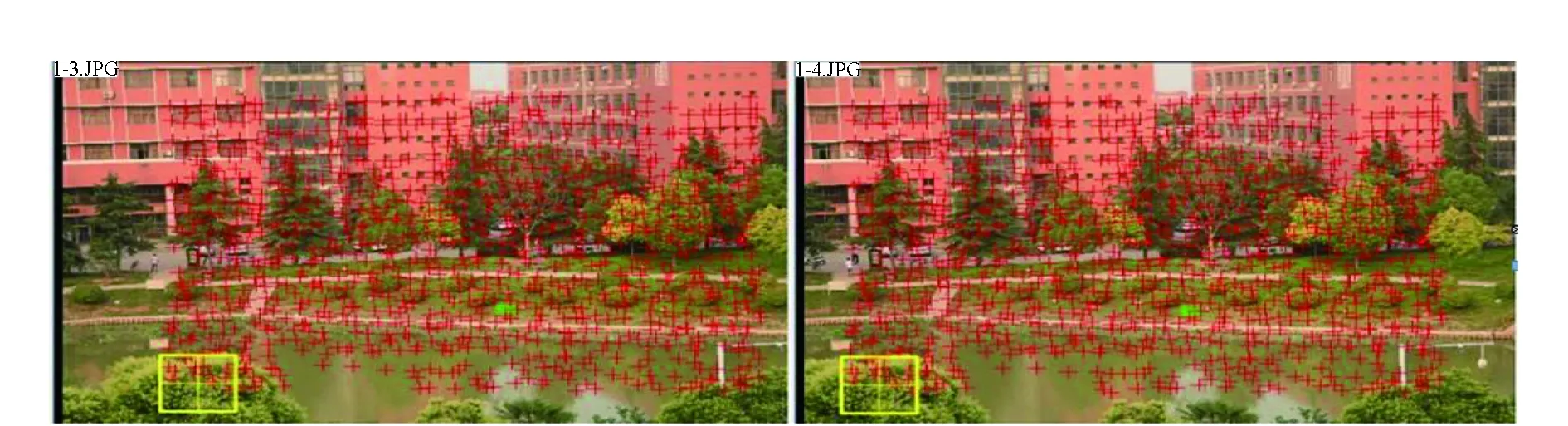
图7 空三匹配后显示立体像对间匹配的同名像点
4)光束法平差:利用光束平差的原理,精确解算模型点空间坐标以及测区内所有影像外方位元素,同时进行自检校,内业处理时,相同影像重叠度同名像点的影像匹配过程见图8。

图8 测区控制点影像匹配
5)加密匹配生成点云图:加密匹配只有在整体平差成功后进行,基本操作与空三匹配相同,整个流程皆为软件自行处理,地形的点云模型见图9。
从图9中,可以明显的看到测区地貌的大致轮廓,这可进行后续处理,为成像覆盖等提供数据基础。处理数据的过程中,会出现无效区域点云数据,需要在点云编辑界面进行点云数据的删减,最终通过影像覆盖,得到TIN景观图,如图10所示。
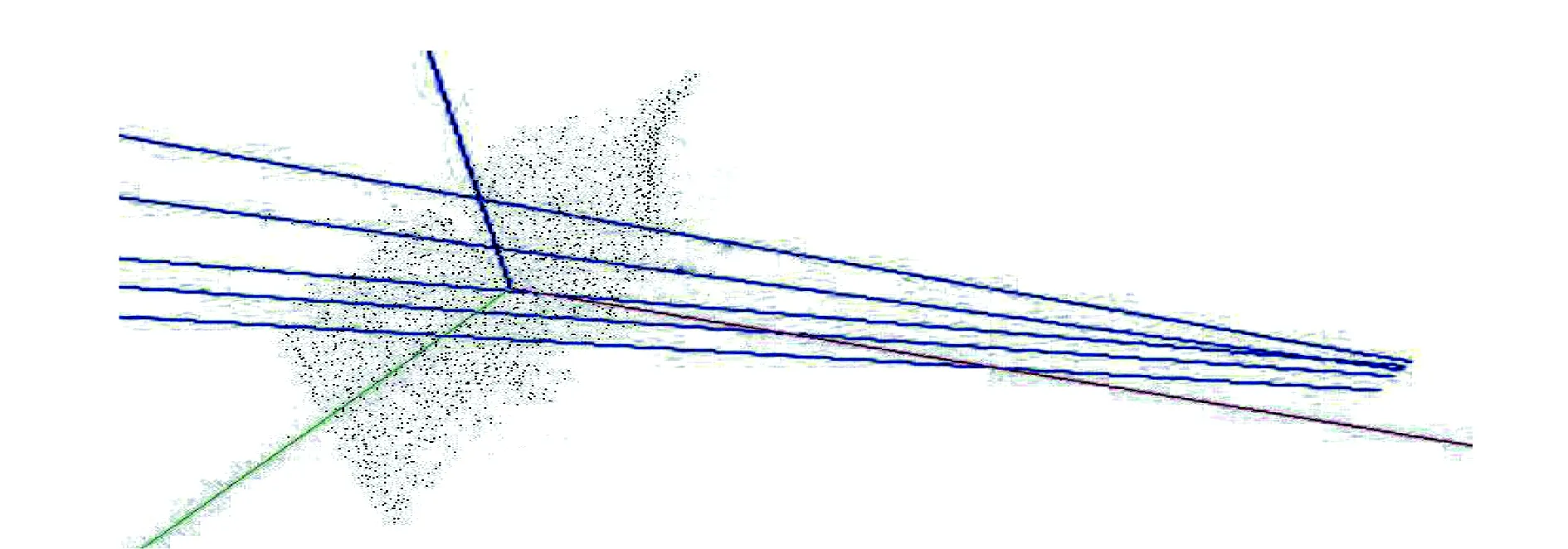
图9 地形点云图

图10 TIN景观图
3 精度分析
3.1 分析结果
测区影像控制点采用《GB/T 7930-2008 1∶500航空摄影测量内业规范评定标准》,影像控制点的平面中误差与高程中误差都不应大于表1中所显示的各地形等级下的测量规范。

表1 高程注记点和等高线的高程中误差 m
注:隐蔽和困难的测区,可以将上表的规定放宽到1.5倍。
相对于基础控制点的实际位置,像控点的中误差不应大于0.2 m;像控点的高程中误差不应像控点高程中误差规范(见表2)。

表2 像控点的高程中误差 m
实验所得部分影像控制点平差后的精度,平差过后的精度统计如表3所示。
对平差报告文件进行分析之后,平面中误差:RMSxy=0.028 8 m,高程中误差:RMSz=0.023 1 m,可以满足三等地形的测量规范精度要求。
3.2 精度探究
本研究利用城镇一级导线点,采用高精度控制测量的方式进行影像控制点与连接点的选取,使得控制点与连接点的坐标误差控制在毫米级,增加了影像匹配精度。结合测区表面概况,对点云数据进行一步步的剔除, 使得点云模型表面尽可能的光滑平整。相较与袁清洌,吴学群[4]等学者的研究,本研究测区范围偏小(30 m×10 m),影像布设的控制点数量多(40个点),分布密集,大大提高了影像匹配的精度。同时将影像重叠度控制在60%以上,在一些重叠度高的区域有4张影像的重叠,进一步提高了影像配准的精度,得到了高精度的TIN景观图。
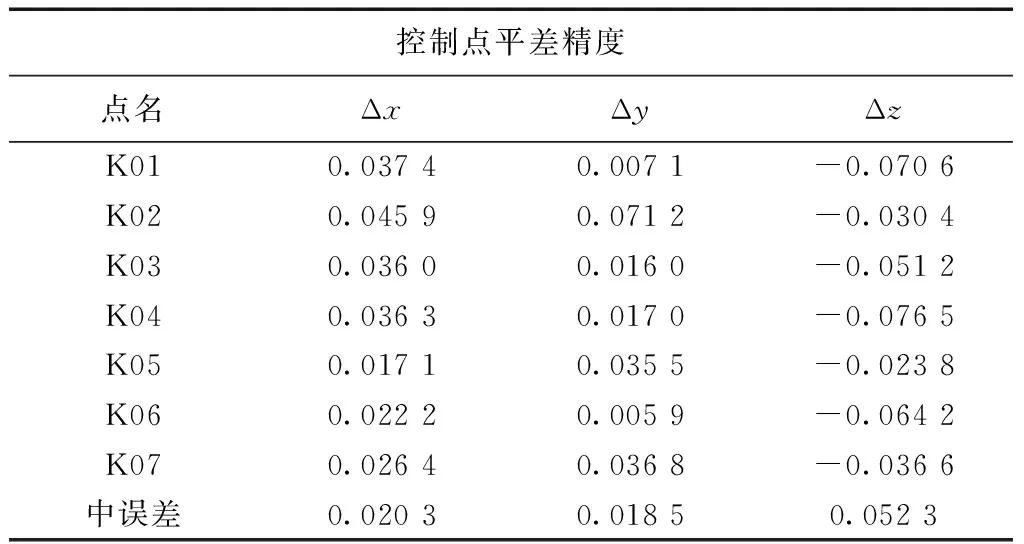
表3 控制点平差精度表 m
4 结 论
本研究采用数字近景摄影测量的方式进行地形测量,在外业中布设三等测量控制网,利用人工标示,在测区布设了影像控制点,采用数码相机进行量测,通过Lensphoto系统实现数据自动化处理,最终实验区地形测量大比例尺地形图与DEM(Digital Elevation Model)模型制作的应用研究成果达到预期效果。
本研究采用多基线平行摄影与旋转摄影两种方式进行,平行摄影选取5个摄影基站,摄取5张像片,精度分析显示平行摄影方式采集的数据处理结果,在竖直方向上的变形要大于旋转摄影的数据采集方式。因此,旋转摄影方式在小区域性研究时更有利于满足快速生产的需要。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
科学与生活(2021年19期)2021-10-30
青年文学家(2021年1期)2021-03-24
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
工程与建设(2019年2期)2019-09-02
测绘通报(2018年10期)2018-11-02
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
