基于Kimura振荡器和虚拟模型的气动肌肉四足机器人步态控制
2018-08-07 03:00张云郭振武陈迪剑王斌锐
兵工学报 2018年7期
张云, 郭振武, 陈迪剑, 王斌锐
(中国计量大学 机电工程学院, 浙江 杭州 310018)
0 引言
仿生四足机器人在复杂环境下的运动步态控制是研究难点[1]。中枢模式发生器(CPG)步态控制是将动物节律行为映射为机器人运动,仿生设计直观清晰,并具有以下特点:存在稳定极限环,所有轨迹都会接近该极限环,即使有扰动,系统也能回到稳定状态[2];经耦合振荡产生节律信号,可实现多足机器人步态协调控制[3];扩展性强,可根据需要添加振荡器和反射模块,通过改变参数可产生多种稳定连续的动态步态;通过节律运动和反射机制能够适应非预知环境[4]。现有的CPG模型中,Matsuoka振荡器在机器人控制领域中的应用最为广泛。Kimura等[3]和郑浩峻等[5]先后对Matsuoka 振荡器模型进行了修改和细化,得到了适用于四足机器人各关节运动控制的CPG. Fukuoka等[6]通过对Tekken四足机器人进行步态控制实验,证实了Kimura CPG模型的有效性和准确性。Wang等[7]提出了具有关节角速度反馈信号的Kimura CPG网络,实现了机器人稳定行走。应对复杂地形如沟壑、台阶时,CPG步态控制很难实现维持四足机器人平稳运行,需要其他控制算法的融入。虚拟模型控制(VMC)是一种生物启发式控制方法,适用于复杂地形步态控制。VMC的应用关键是确定系统需要控制的自由度,在该自由度上构建恰当的虚拟构件以产生合适的虚拟力,并通过Jacobian矩阵计算期望的关节力矩[8]。Ajallooeian等[9]提出CPG结合VMC的生物启发运动控制器,实现了四足机器人在仿真环境下的崎岖地面行走,但未在实物上得到验证且地形适应能力有限。Zhang等[10]设计一种基于虚拟模型的四足机器人对角小跑步态控制器,在仿真环境中展示了机器人的全方位移动能力、应对不平坦地形能力和抗冲击能力。Xie等[11]扩展了VMC,有效控制了围绕支撑对角线的身体旋转。Hunt等[12]提出了基于期望行为设置耦合神经系统参数值的方法,实现了气动肌肉驱动的四足机器人节律行走。
本文用Kimura振荡器构建互抑振荡器模型,组建膝髋关节的控制网络,实现仿生四足机器人的步态生成与运动控制。本文改进了Kimura振荡器的输出与关节角度的映射,充分利用振荡器有固定控制模型的特点,将Kimura振荡器的疲劳项组合作为膝关节的驱动信号;设计四足机器人的完整CPG运动控制模型;在CPG控制的基础上引入VMC,通过仿真和实验验证了沟壑地形下机器人的稳定行走。
1 四足机器人机构及步态分析
1.1 气动单腿运动学
气动肌肉四足机器人二维模型的单腿结构简图如图1所示。
单腿具有髋关节与膝关节两个旋转自由度,其转动角度分别为θh和θk,下标h、k分别表示髋关节和膝关节,大腿、小腿的长度分别为lh和lk. 坐标系HxHzH的原点固定在髋关节转轴中心,xH轴沿着机器人躯体指向前进方向,zH轴垂直于xH轴且正方向向上;坐标系KxKzK的原点固定在膝关节转轴中心,xK轴沿着小腿方向向下,zK轴垂直于xK轴向上;坐标系PxPzP原点固定在足端,xP轴沿着小腿方向向下,zP轴垂直于xP轴向上。利用机器人的Denavit-Hartenberg参数可以求得足端在髋关节下的转换矩阵为

(1)
进而可得足端P点在髋部HxHzH坐标系下的Jacobian矩阵为
(2)
1.2 CPG步态发生器
1.2.1 Kimura振荡器
CPG节律步态通过互相连接的多个非线性振荡器产生。Kimura振荡器产生的步态数据控制足式机器人行走更为流畅,且能更好地对外界的刺激做出响应。Kimura振荡器的数学模型为
(3)

(4)
四足机器人同腿膝关节和髋关节具有固定的相位关系,通常以振荡器的输出yih作为髋关节驱动信号,而膝关节驱动信号yik需要对yih做半波映射生成,计算复杂。
本文充分利用同腿膝关节和髋关节相位关系及多个CPG耦合生成节律步态信号,分别将振荡器的状态输出、疲劳输出线性合成作为髋关节、膝关节的驱动信号:
(5)
1.2.2 关节轨迹
图2(a)为Kimura振荡单元,由两个相互抑制的Matsuoka神经元构成。由4个Kimura振荡器相互耦合形成振荡器网络模型,以其输出作为四足机器人各关节的驱动信号,CPG步态拓扑结构如图2(b)所示。
本文采用对角步态验证步态的合理性,并为后续控制算法提供基础。根据四足机器人在不同步态下的相位特点,可以给出四足机器人在对角小跑下的连接权重矩阵:
(6)
CPG各参数取值如表1所示。
该参数下振荡器网络模型的输出如图3所示。由图3可知,对角步态的周期为0.80 s,各髋关节输出幅值为0.320 0 rad,各膝关节输出幅值为0.220 0 rad. 从图3中可以看出,对角步态下,左前腿和右后腿最终的关节角度保持一致,右前腿和左后腿的关节角度保持一致。

表1 CPG参数
2 VMC方法
2.1 虚拟模型
足式机器人运动控制最常用的虚拟构件有弹簧和阻尼器[13]。VMC本构方程为
(7)

由(7)式可见,通过虚拟模型,可将高层的控制决策(期望速度与位移)和虚拟力联系在一起,进而可通过规划期望速度和位移实现复杂的运动控制。
VMC方法属于机器人学领域的工作空间控制范畴,其本质上是 Jacobian 转置控制器[14],其控制框图如图4所示。通过将工作空间的控制误差δx乘以增益系数计算得到力向量F,并将该力施加到机器人足端,产生特定方向的推运动和拉运动,进而减小控制误差。
图4中:机器人的实际位置x可由关节角度q通过正运动学得到;通过(2)式、(7)式和(8)式可将F转化为等效的关节力矩τ,在τ驱动下各关节的控制误差逐渐减小。
τ=JTF.
(8)

(9)
综上所述可知,Jacobian转置控制器忽略了机器人的动力学因素,具有更简单并且直观的控制规则。
2.2 基于虚拟模型的跨沟壑步态
本文在设计四足机器人节律运动CPG模型的基础上,引入VMC,以适应存在沟壑、障碍物、斜坡等崎岖环境。单腿虚拟力在二维空间中可分解为沿x轴与z轴两个方向的弹簧- 阻尼构件,如图5所示。图5中,(xPd,zPd)为足端轨迹坐标,(xP0,zP0)为足端初始坐标点,(xPf,zPf)为足端末端坐标点,Δh为抬腿高度(可根据地形和障碍物高度设为常数),f′为施加在足端的虚拟力。
采用虚拟模型的力控制方法,四足机器人在崎岖地形环境下可生成顺应该地形环境的运动,从而提高自身的环境适应性[15]。本文在髋部坐标系HxHzH下,用摆线函数规划足端轨迹坐标(xPd,zPd)为
(10)
式中:s为跨步步幅;φ=2πt/Ts为周期角,t为摆动时间,Ts为摆动周期。进而可得施加在足端的虚拟构件产生的虚拟力:
(11)
式中:[k′x,k′z]和[b′x,b′z]分别为虚拟构件的刚度系
2.3 控制器设计
气动肌肉四足机器人的控制框图如图6所示。主要包括CPG结合PID控制器、VMC及状态机3部分。
CPG结合PID控制器用于控制机器人在平地及小幅波动的地面行走。Tr、Ta、α、β、c为Kimura振荡器的输入参数,θd为规划的关节角度,θ为实际机器人的关节角度,偏置气压Δp由PID控制器对关节角度进行闭环控制得到。综合考虑气动肌肉的耐压范围和肌肉模型的准确度,将初始气压p0设置为0.40×[1 1 1 1 1 1 1 1]T.p1、p2为单关节两侧拮抗式肌肉的输入气压,本文中所涉及气动肌肉四足机器人总共有8个关节、16根气动肌肉需要控制。
图6中:VMC控制器用于控制机器人在波动较大的地面行走,如沟壑、幅度较大的台阶等;s、Δh、Ts为足端轨迹规划输入参数,Pd为规划的足端轨迹坐标,P为实际机器人的足端坐标值,虚拟力模型由(11)式确定,Δp由关节偏置气压模型[16-20]得到,初始气压p′0设置为0.40×[1 1]T. 本文在步态控制器中引入关节摆动相位和触地状态的步态切换机制,如图6中所示的状态机。平坦路况下,机器人以CPG结合PID控制器作为执行器,当遇到沟壑或幅度较大的台阶时,通过触地相位和俯仰角的反馈触发VMC,当行走恢复到平地时切换至CPG结合PID控制。
3 仿真与实验
本文所涉及四足机器人的机构参数可参照文献[16],根据2.3节所述在MATLAB软件中搭建Simulink-Adams联合仿真平台,对四足机器人应对沟壑地形进行仿真实验。
假设四足机器人以对角步态跨过一条宽度为50 mm(机器人足端宽度的2.50倍)、深度为80 mm的沟壑,实时计算摆动腿的相位及摆动腿足端的触地力,进而判断该腿是否踏空。当发生踏空事件时,计算摆动腿在规定的触地时间内未检测到其足端有接触力,此时对踏空腿施加VMC(其余腿保持原步态不变),以引导踏空腿跨过沟壑。
仿真结果分别如图7和图8所示。由图7和图8可知1.00 s后机器人开始起步,3.16 s时,左前腿(红色)足端在相应的时间内应触地且有力的输出,但此时检测到输出力为0 N,表明已发生踏空事件,此时在踏空腿上引入VMC,引导踏空腿快速跨过沟壑,处于摆动相的右前腿(黄色)在进一步摆腿迈步的过程中寻找地面落足。由于在跨越沟壑的过程中,左前腿和右前腿同时处于摆动状态,在左前腿快速跨过沟壑时,落地产生较大的接触力。踏空腿在VMC作用下运行一个周期使踏空腿越过沟壑,接着在状态机的作用下过渡到CPG步态,从足端接触力可以看出踏空腿过渡到CPG步态后动作趋于稳定。
质心位移和俯仰角变化如图9所示。由图9可见,在t=3.20 s时发生踏空事件,跨越沟壑过程中躯体先微抬后俯冲,俯仰角先增大后减小而后稳定在0.026 5 rad左右。
系统硬件主要包括上位机、数据采集卡、电磁比例阀、角度传感器、压力传感器和机构本体。四足机器人每条腿包括髋、膝2个关节,每个关节由2根拮抗式安装的气动肌肉进行驱动,整个系统共8个关节。通过采集卡获得关节角度位移信号,并将关节角度输送给上位机,通过前述控制算法运算得到机器人运动过程中的控制律并传送给采集卡,变换后的控制信号经采集卡输出给电磁比例阀,改变比例阀的输出气压,可以实时调节关节两侧气动肌肉的长度,实现关节的角度跟踪。经过调试,选取的实验参数如表2所示。
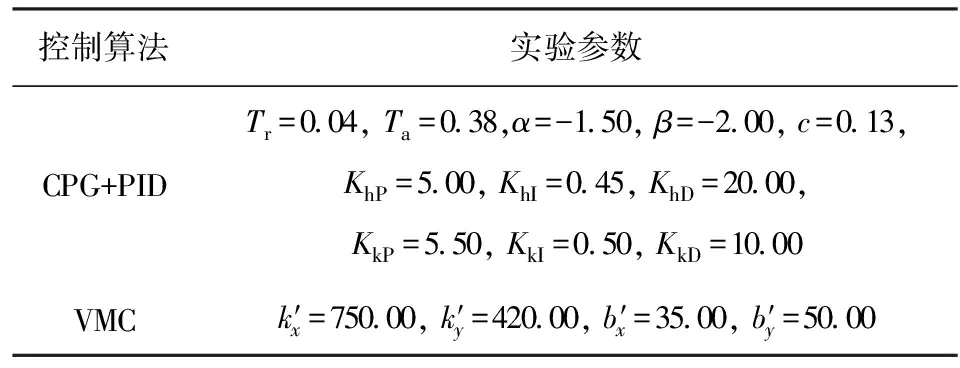
表2 实验参数
表2中下标P、I、D表示实验PID参数,图10为气动肌肉四足机器人跨沟壑行走实验。实验中根据机器人的实际步长设置沟壑宽度为50 mm,开始运行1.20 s后,左前腿发生踏空事件,触发VMC控制器,引导左前腿继续迈步,右前腿在进一步摆腿过程中寻找落足点,实现了跨越沟壑的动作。图11为行走过程中踏空腿关节角度变化曲线,实验结果表明,机器人运动平稳,步态协调。
4 结论
本文设计了一种基于Kimura振荡器和VMC的四足机器人步态控制系统,从一个更直观的角度来描述复杂环境下机器人的行为控制。仿真和实验结果表明:
1)采用Kimura CPG振荡器作为机器人的节律步态发生器,并实现了对气动肌肉驱动的四足机器人节律运动设计。
2)改进CPG输出与关节角度之间的映射关系,简化CPG耦合网络模型,关节运动之间的相位关系合理。
3)建立沟壑地形自适应步态控制器,可引导机器人跨越宽度为机器人足端宽度2.50倍的沟壑地形。
由于本文所涉及气动四足单腿关节仅有两个俯仰关节,行走过程中会有偏航位移产生,后续工作将通过添加脊柱矫正偏航位移,使机器人在跨越障碍物时足端与地面的接触更加柔顺。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
天然气与石油(2022年4期)2022-09-21
包装工程(2022年10期)2022-05-27
中国宝玉石(2021年5期)2021-11-18
北京航空航天大学学报(2021年6期)2021-07-20
文萃报·周五版(2020年15期)2020-04-22
学生天地(2019年4期)2019-02-25
疯狂英语·新读写(2018年5期)2018-11-29
科学之谜(2018年4期)2018-09-17
劳动保护(2018年5期)2018-06-05