
基于PID控制的内燃机电磁阀控制仿真研究
2018-08-03 03:08
汽车文摘 2018年8期
带有可变提升阀定时系统的发动机是降低发动机排放和提高效率的众多措施之一,这种控制机构可以提高发动机的容积效率,增加最大扭矩范围,从而降低燃料消耗,减少发动机排放。本文通过MATLAB软件研究了电磁阀控制系统的稳定性。首先设计了电磁阀系统内部的磁体和相互作用力,然后利用两自由度质量-弹簧系统作为系统中的力学模型,最后设计了一个PID控制器来保持系统的稳定性。电磁阀系统结构和模拟模型见文中的Fig.1和Fig.2。
研究结果表明,控制器各自将最大阀位移区域从2mm减小到0.001mm,将持续时间从0.1秒减小到0.022秒,提升阀的沉降速度为 0.0126,标准偏差为0.1304,电枢沉降速度为0.0184,标准偏差为0.1363。提升阀的平均位移为0.0011,标准偏差为 0.0003,电枢的平均位移为0.0015,标准偏差为0.0003。各阶段的传递介质为-37.5和-169,增益为10.3和-9.35。负增益余量意味着降低增益将导致稳定性降低,而正增益余量意味着增加增益会使稳定性降低。由此可见,如果阀门打开或关闭足够快时,电流极限将被去除,从而能够有效地提高发动机效率,因此当务之急通过控制器使得阀门达到最大升降速度。此外,电磁阀的延迟时间也会影响控制器的效果,从而影响系统的响应。未来研究工作将进一步优化PID控制器中的控制参数,以更好地保证系统的稳定性。

Fig.1.Electromagnetic poppet valve model diagram
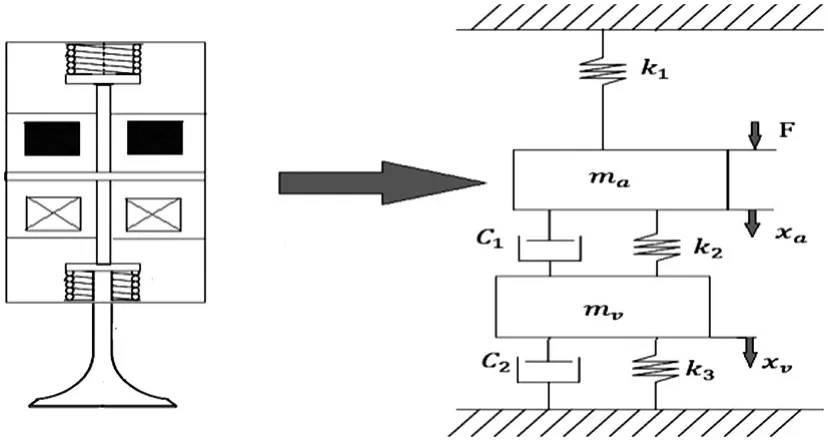
Fig.2.Modelling the system as a two degree of freedom system.
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
弹箭与制导学报(2020年1期)2020-07-09
汽车维修与保养(2019年7期)2020-01-06
弹箭与制导学报(2019年6期)2019-06-24
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
科学与财富(2017年9期)2017-06-09
科技创新与应用(2017年1期)2017-05-11
