智能制造技术在汽车领域的应用
2018-08-03 03:07:52
汽车文摘 2018年8期
随着科学技术的进步,汽车制造业在新型工业背景下不断进行改造和升级,智能制造技术在汽车领域得到了越来越广泛的发展,智能技术产品的应用也将大大推动未来汽车发展的进程。
1 工业4.0背景下的智能制造技术[1]
工业4.0承诺提高制造灵活性,以及实现大规模定制,更好的质量和更高的生产率。智能制造在工业4.0中发挥着重要作用,将传统资源转换为智能对象,使其在智能环境中感知并工作。工业4.0旨在创建智能工厂,其中制造技术通过网络物理系统(CPS)、物联网(IoT)和云计算进行升级和转换。在工业4.0时代,制造系统能够监控物理过程,创建物理世界的所谓“数字双胞胎”(或“网络双胞胎”),并通过与人类的实时通信和合作做出明智的决策。将嵌入式生产系统技术与智能生产流程相结合,为从根本上改变行业价值链、生产价值链和商业模式的新技术时代铺平道路。
全面实施智能制造,客户越来越多的定制需求将增加制造成本,需应用诸如网络和物联网、虚拟化和服务技术以及智能对象/资产技术的平台技术,通过智能设计、生产、物流和供应链管理充分利用灵活和可重新配置的制造系统,从而降低成本。多路平台技术需要一个更开放的创新框架,因此,面向服务的智能制造概念将成为工业4.0的关键组成部分。图1显示了工业4.0 IMS(Industry Manufacturing System)框架,其中研究主题分为智能设计、智能机器、智能监控、智能控制和智能调度。

图1 工业4.0 IMS框架
智能制造在现代工业和经济发展中变得越来越重要,也将影响传统汽车制造业的工业转型,将尖端技术应用于制造和服务中的传统产品,为各种产品和系统提供附加价值。
2 从传统的自动化制造系统到整子(Holonic)智能系统[2]
在过去的50年中,自动化制造系统基于计算机集成制造(CIM)技术得到快速发展。CIM模型是为一步开发而设计的功能模型,但由于制造系统的环境极不稳定,商业市场的需求转变需要过程控制系统的全面转换,现有CIM系统的转换和扩展很困难,并且在异常情况下性能会显著下降,强烈分层和集中的系统通常具有刚性互连,导致通信渠道不灵活。因此,具有更快反应和适应技术,更灵活的操作和分布式结构的系统才能满足现有需求。
2.1 整子智能系统(Holonic Intelligent System)
整子智能系统(HIS)又称分布式智能系统。系统是完全分散的,所有单元都具有某种形式的智能,不需要中央处理单元。如图2和图3所示,系统单元(SE)使用定义良好的协议相互通信,这些单元可以直接相互寻址而无需中央处理单元的干预,中央处理单元将传输信息并包含用于系统操作的算法。这些算法根据任务(分布式智能)分布在各个单元中。SE具有自治性、协作性,用于转换、传输、存储和处理信息,系统的自主性确保所有智能单元能够运行,直到其本身或相邻单元决定它无法操作。该算法运用系统组决策而不是类似点的决策,故系统传感形式是区域的,而不是点状的。

图2 执行任务的临时组示意图
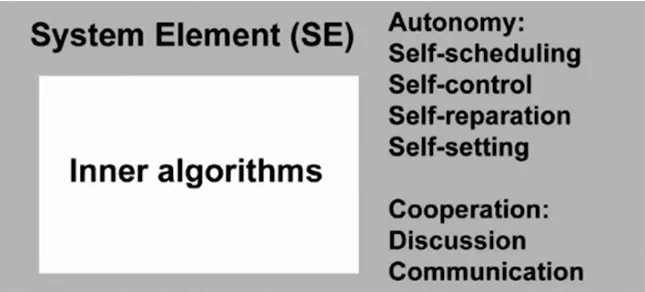
图3 内部功能分类
2.2 结论
考虑到本文中提到的相关研究成果,整子智能系统是替代传统集中型自动化制造系统的最合适的技术。该系统运用到汽车制造中,实现人机一体化科学管理,不会由于系统的复杂性而影响生产效率,对制造业的发展起着重要推动作用。
3 车联网的智能技术运用[3]
社会车联网(SIoV)是车载领域应用物联网(SIoT)的概念,通过增强现有的VANET(Vehicular Ad-hoc Networks,车载自组网络)技术的发展,彻底改变了现有的智能交通系统(ITS)。文中介绍了一种基于Restful Web技术的可扩展的SIoV架构,强调Web技术的重要性,以满足所需的互操作性并支持众多组合式服务。
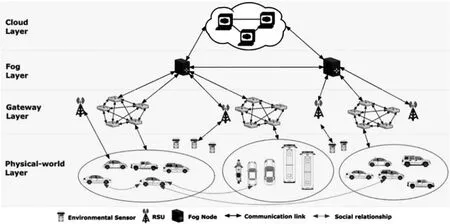
图4 SIoV的整体架构示意图
如图4所示,SIoV有物理世界层、网关层、雾层、云层四个部分,其中包括应用程序、用户、安全隐私、信任管理以及关系管理系统。
物理世界层处理车辆、环境传感器、驾驶员、乘客和行人等物理对象。核心功能是通过安装在车辆中的传感器以及驾驶员和乘客携带的设备来感测数据。网关层负责为物理世界层提供面向基于云的基础架构的门户。该层收集物理世界数据并将其传递给雾层。所有数据都通过车载网络使用蓝牙、BLE或Wi-Fi传送到智能车辆模块。智能车辆的特殊模块具有必要的通信协议栈,允许它们直接与雾层通信。另一方面,没有直接向雾层发送数据的传统车辆和环境传感器使用RSU或附近的智能车辆模块来完成。其中,云层利用云技术提供集中式后端服务,由高性能服务器和存储器来执行复杂的计算、存储大量数据并制定系统范围决策的位置,动态地调度和管理其资源以响应所设计的策略和系统的当前趋势。雾层由许多雾节点组成,可以是边缘路由器、智能手机和各种其他计算系统。通过在SIoV中提供基于雾的分散式架构,该层在确保所需的可扩展性方面发挥着至关重要的作用。
此外,所提出的SIoV架构可扩展集成并与名称数据网络(NDN)、信息中心网络(ICN)、软件定义网络(SDN)和网络功能虚拟化(NFV)协同使用。
4 新兴车辆通信技术的智能应用[4]
新兴通信技术在智能交通系统(ITS)领域开辟了新的管理可能性,特别是车辆到基础设施(V2I)和车辆到车辆(V2V)通信的技术应用。
在主动交通管理领域,配备车载通信系统的车辆能够与基础设施和其他车辆交换信息。本文提出了一种利用智能车辆通信能力且名为“合作合并助手”(CoopMA)的新型合并辅助策略,其控制需要在主要行车道上配备有装备的车辆,以便为交通信号灯释放的入口匝道车辆创造合并空隙,减少合并车辆对交通流量的干扰,实现V2I通信的智能车辆的合并辅助功能。

Fig.3.Representation of the communication request by the Cooperative MA system.The control centre estimates the traffic conditions on the on-ramp and main carriageway,releases the on-ramp vehicles using the traffic signal and slows down the cooperative vehicle on the main carriageway.
文中Fig.3中,CoopMA系统需要V2I和I2V信息交换,分别实现入口匝道和主要行车道车辆向控制中心提供交通状况信息、控制中心释放入站匝道车辆并使合作车辆周期性地减速。控制中心估计入口匝道和主要行车道的交通状况,使用交通信号释放入站匝道车辆,并减慢主要行车道上的合作车辆的速度。
由于以间接的方式实现,车辆到车辆(V2V)通信不是必需的。除了合作车辆和交通灯释放的第一辆车(均由CoopMA算法直接控制),其他车辆的运动受到正常车辆遵守规则的限制。因此,虽然任何类型的V2V通信都可以改善系统,但不需要V2V通信。从必要通信的描述中可以清楚地看出,CoopMA需要适度的先进技术,每个交通灯周期只需要一个智能车辆,由CoopMA计算的可以在间隙中合并的最大车辆数量可以由传统的RM控制策略用作确定目标入口匝道流量的进一步约束。
在不久的将来,交通将由装备和未装备的车辆组成,并且应该开发在这个过渡时期可用的管理系统。智能通信技术的创造和应用在汽车领域将得到更广泛的发展。
5 智能运输系统(ITS)中车载传感器的应用[5]
近年来,车载自组网络(VANETs)吸引了业界和学术研究界的兴趣,是未来加强运输安全和保障的最有效途径。智能传感器则将在系统中发挥至关重要的作用。本文设计、开发并实施了一种具有自主恢复程序的车载传感器诊断分析解决方案。基于人工智能技术用于监测、报告和自动恢复的车辆传感器,其算法不仅确定传感器的操作状态,还执行自主恢复的程序。

Fig.2.Proposed architecture of diagnosis expert system
Fig.2中系统包括以下六个部分:
1)用户显示:指示特定传感器的状态以获取驾驶员信息。在出现故障的情况下,系统执行传感器数据的分析,向驾驶员显示状态,恢复命令自动给予传感器。
2)专家知识库:从人类技术专家、专业书籍、技术手册和各种其他来源收集的信息以规则的形式保存的领域。
3)推理引擎:当任何传感器发生任何类型的故障时,推理引擎使用知识库分析存储在系统存储器中的数据,并根据知识推断规则是否满足。
4)系统内存:存储从信号代理应用程序接收的数据或存储日志文件。
5)信号代理:读取传感器信号的软件应用程序。日志文件中的传感器数据直接传送到主软件应用程序以进行决策。
6)传感器:为了安全起见,使用全球定位系统(GPS)、发动机和防撞雷达设计系统。
传感器的智能制造技术的发展丰富了智能车辆领域所需的控制策略,同时,通过具有车载自组织网络的路边单元连接的车辆可以提供更好的安全系统。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27 06:35:38
中国交通信息化(2020年4期)2021-01-14 01:31:16
铁道通信信号(2020年8期)2020-02-06 09:13:18
小太阳画报(2018年3期)2018-05-14 17:19:26
中国交通信息化(2018年11期)2018-03-01 05:43:42
中国公共安全(2017年11期)2017-02-06 05:28:09
阅读与作文(小学低年级版)(2016年12期)2016-12-22 19:35:04
少年博览·小学低年级(2016年9期)2016-11-24 06:21:37
汽车文摘(2015年11期)2015-12-02 03:02:53
电源技术(2015年2期)2015-08-22 11:28:14