
直圆型柔性铰链机构变形量计算与仿真分析
2018-08-02 06:19杨小光尚守锋
时代农机 2018年5期
彭 杰,杨小光,尚守锋
(中国电子科技集团公司第四十一研究所,安徽 蚌埠 233010)
柔性铰链机构是实现微位移技术的关键机构,由于其体积小、无间隙、无机械摩擦、运动平滑、精度高,被广泛应用于微动机器人、陀螺仪、加速度计、精密天平等仪器设备中。对柔性铰链机构的变形量进行计算是设计这些精密仪器设备的基础。本文只对直圆型柔性铰链机构的变形量进行理论计算与仿真分析。
1 理论计算
1.1 单个铰链的转动刚度计算
直圆型柔性铰链的几何结构见图1,图中t为柔性铰链的最小厚度,R为柔性铰链的切割半径,b为柔性铰链的宽度,h为柔性铰链的高度。
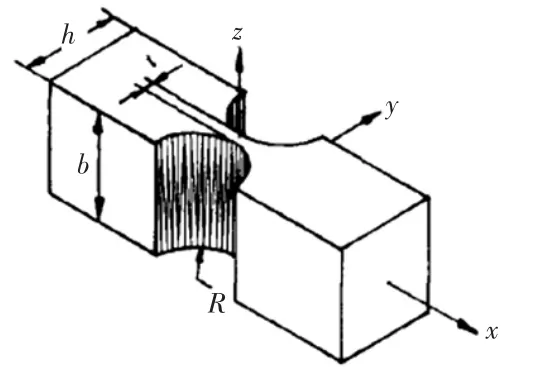
图1 直圆型柔性铰链示意图
柔性铰链的中部尺寸较小,结构较为脆弱,能够在力矩的作用下产生较大的角变形。为了便于分析,在圆心角θ处取微元对其进行受力分析,如图2所示。

图2 微元体划分示意图
微元体的高度:a=t+2R(1-cosθ)
微元体的厚度:du=d(Rsinθ)=Rcosθdθ
由于柔性铰链切口尺寸较结构的其他尺寸小的多,可以认为弯矩变化很小;此外,由于柔性铰链的变形很小,挠曲线非常平坦,根据材料力学,可得出以下公式:

式中,E为材料的弹性模量,M(x)为作用于微小段dx的弯矩,I(x)为微小段dx的截面对中心的惯性矩。
则柔性铰链的转角:

则有转动刚度:
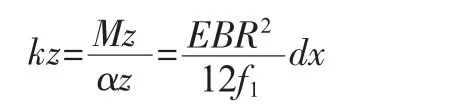
其中中间变量f1计算如下:
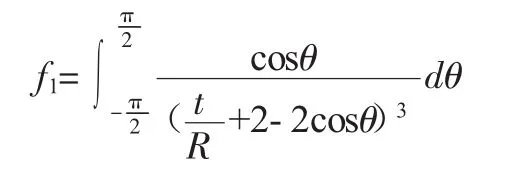
具体的参数如下:弹性模量E=200GPa,最小厚度t=0.4mm,切割半径R=2mm,宽度b=4mm。通过matlab编程计算,f1=64.1665。
计算得出,柔性铰链的转动刚度kz=4.1559Nm/rad。
1.2 铰链机构的等效刚度计算
只考虑柔性铰链的弯曲变形,把柔性铰链视为理想的转动副,根据能量守恒求解其等效刚度。根据参考文献2,可知单平行四杆铰链机构的等效刚度
式中,d为柔性铰链机构的曲柄长度。
具体参数为:曲柄长度d=18mm。
计算得出柔性铰链机构的等效刚度keq=5.13×104N/m。
1.3 铰链机构的变形计算
2 有限元仿真分析
根据上述参数,首先在Pro/E三维绘图软件中对柔性铰链机构进行三维建模,保存为stp格式后,导入ANSYS Workbench软件中。模型的加载条件为:底面施加固定约束条件,受力面施加1N力的约束。对模型加载后,求解得出柔性铰链机构的变形图如图3所示。
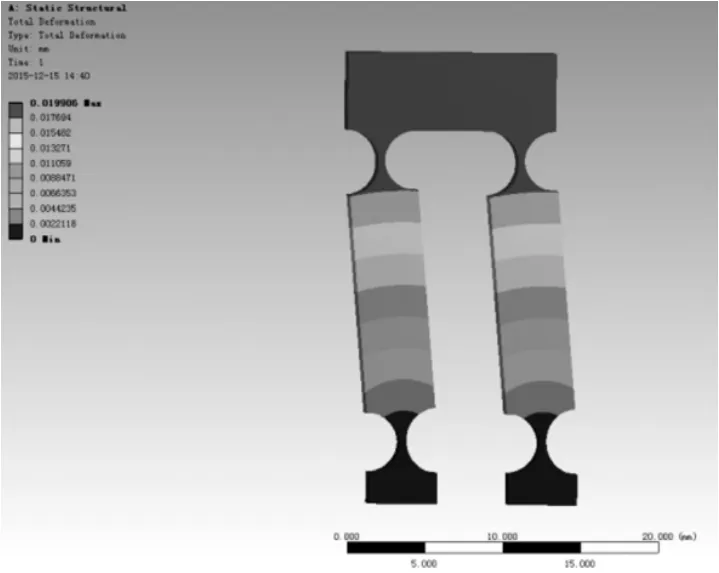
图3 柔性铰链机构的变形图
从图2可看出,柔性铰链机构的变形量从底部到上部依次增加,上部变形量19.9 μm,与理论计算结果19.49μm的误差为2.06%,本文的理论计算方法是行之有效的。
3 结语
对直圆型柔性铰链机构的变形量进行了理论计算与仿真分析得出:(1)柔性铰链机构的变形量从底部到上部依次增加;(2)理论计算结果与有限元仿真结果误差为2.06%,证明本文的理论计算方法是行之有效的。
此外,本文在计算柔性铰链机构的等效刚度时,只考虑了柔性铰链的弯曲变形,未考虑拉伸变形,如需得出更加精确的结果还需要考虑拉伸变形的影响。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
河北工业大学学报(2016年4期)2017-01-07
广西科技大学学报(2016年1期)2016-06-22
山东工业技术(2016年12期)2016-06-13
工程建设与设计(2016年8期)2016-03-11
