
基于改进决策树分类算法的遥感影像分类研究
2018-07-27 06:13,,
计算机测量与控制 2018年7期
,,
(大连科技学院 信息科学学院,辽宁 大连 116001)
0 引言
随着当今科技的发展,遥感影像技术在科研及社会生产中得到广泛的应用,如农业监测、地理情况分析、天气监测等,遥感影像分类更是其核心技术,多年来被研究人员重点研究与应用。遥感影像分类大多对遥感影像的光谱图提取出特征[2],对像元进行分类,常用算法有决策树算法[3]、K-Means[4]等。其中,决策树算法属于分类预测,通过多预先收集的样本数据分析,构造决策树用于特征分类。因为遥感图像的特征多样性,光谱特征不能将遥感图像特征很好的描述出来,所以需要对遥感图像特征进行运算处理,来有效的描述特征空间,再用来分类。常用的特征运算有K-T变换[5]、比值变换[6]以及差值变换[7]等等。随着研究者的深入研究,后来产生了面向对象的分类方法,即先分割,再分类。传统的遥感影像特征提取只能在单个像素上进行依靠光谱信息的特征提取,高分辨率的遥感影像由于波段较少,光谱分辨率不高,如果只提取光谱特征而忽略其他特征信息,则会降低分类精度,影像实验结果[8]。所以,当对较高分辨率的遥感影像进行分类时,宜采用面向对象的遥感影像分类。
遥感影像的光谱特征极其复杂,经常会出现两个不同的地物有同一光谱,或者两个不同地物却有着相同的光谱。仅依靠遥感图像的光谱特征与纹理特征分类是不能保证分类效率与精度完全准确的,所以本文需要进行整合,共有三种整合方式:(1)分类前,对训练元组进行人为地补充,使其更完善;(2)分类中,辅助数据参与分类;(3)分类后,改正分类结果中不正确的分类。在第二种整合中,辅助数据需要进行量化处理,以便用于分类实验中新增波段参与分类,本文可以将它当做一个独立的数据。
本文将分形和决策树分类算法相结合,采用分形数学描述地物的纹理特征,将多光谱影像和纹理图像结合,以改进决策树分类器开展遥感影像分类研究。
1 遥感影像分形维数计算
目前,应用分形理论进行遥感影像分类的研究也有很多,主要集中在分形维数计算方法以及基于分形维数的遥感影像分割等方面[9]。分形理论在纹理分析的应用中,通常采用分形维数来描述纹理[10]。分形维数用来表示自然界中地物的不规则程度,其并不一定是整数,分形维数也可以用分数来表示,与欧氏几何中的整数维有明显的差别。分形维数最大的特点是其与人的视觉感受相互一致,即影像表面越粗糙,分形维数越大。而且分形维数在多尺度,即多种空间分辨率上具有不变性。因此使用分形维数能够很好地描述遥感影像的纹理特征。
分形维数的计算方法有差分盒维数法[11]、基于灰度插值法[12]、基于分型布朗运动自相似模型[13]的方法、以及毯覆盖模型[14]等方法。
本文采用Peleg提出的计算灰度图像分形维数的毯覆盖模型来计算遥感影像的分形维数。毯覆盖法将图像视为有一定高度的山体,高度为图像的灰度值。在距离山体表面ε的上下方铺盖厚度为2ε的毯子。设遥感影像的灰度值为g(i,j),毯子的上表面用aε表示,下表面用bε表示,公式(1)表示初始条件,上下表面的生长原则分别为公式(2)、(3),其中d表示(m,n)和(i,j)两点之间的距离。
g(i,j)=a0(i,j)=b0(i,j)
(1)
aε(i,j)={max{aε(i,j)+1,maxaε(m,n),
d(i,j,m,n)≤1,ε=1,2,...}
(2)
bε(i,j)={min{bε-1(i,j)-1,minbε-1(m,n),
d(i,j,m,n)≤1,ε=1,2,...}
(3)
因此毯子的容积为:
Vε=∑i,j(aε(i,j)-bε(m,n))
(4)
表面积为:
(5)
分形表面积符合关系式A(ε)=Fε2-D,所以
logA(ε)=c1logε+c0
(6)
其中,c1=2-D为拟合的直线的斜率,通过改变尺度ε的大小,可以求出不同的c1,从而可以求出分形维数D。
2 特征提取
特征提取是基于像元遥感影像分类中的最重要步骤之一,遥感影像的光谱特征与空间特征有很多,但是不是所有特征都可用于遥感影像分类。所以要从众多的特征中选择出可用于遥感影像分类的特征。之后还要进行提取,才能进行分类。常用的提取方法如下:
2.1 缨帽变换
缨帽变换也成为K-T变换,即将一幅遥感影像解译出几个数据,湿度指数、绿度指数和亮度指数等[15],如公式(7)所示:
Y=RTx+r
(7)
其中,R为缨帽变换系数,r为常数偏移量。X和Y分别为变换前后多光谱空间的像元矢量。对遥感影像光谱图的1~5波段和7波段进行缨帽变换,R如公式(8)。
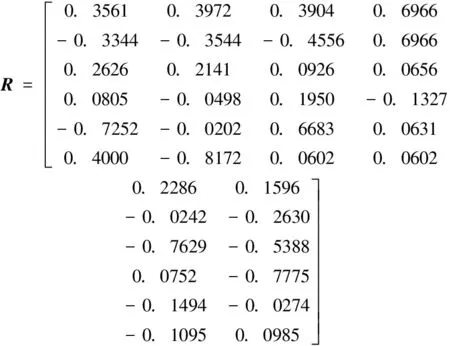
(8)
2.2 植被指数
对遥感影像进行植被生长情况分析会用到植被指数,利用遥感影像光谱图近红外波段与红外波段反射值之差与之和的比值可以反映植被特征[16]。依据植被指数就可以对一幅遥感影像中的植被进行分类。常用的植被指数有归一化植被指数(NDVI)。可由公式(9)得出:
(9)
其中,Pnir和Pred分别为遥感多波段影像中的近红外波段和红波段的反射值;如果得到的数值处于0.3-0.7之间都代表植被特征,可以用于分类。
2.3 纹理变换
不是所有的影像都在很小区域能呈现规则性,但是大范围的整体却能体现出规则这就是纹理特性。在遥感影像分类中,将纹理特征作为辅助特征进行分类,可提高分类的正确率。本文知道纹理特征需要对像元集进行处理,需要特定的测试算法可以采用统计量算法[17],需要用到的统计量有均值(10)、方差(11)和熵(12),其计算需要用到总像元数目,记为w,第i级灰度概率fi,以及第k波段的量化等级,记为quantk。
(10)
(11)
(12)
3 Landsat7 ETM+影像的特征提取
由于遥感影像的特征提取过于繁琐,不在本文的研究范围内,所以在前文介绍了原理,实践操作需借助第三方软件ENVI 5.1来实现。本文采用的遥感影像为Landsat7 ETM+遥感影像,其数据波段的第六波段是热红外,不能有效反应不同地物的特征,对于分类无实际意义,所以不采用。第一至第五以及第七波段中有RGB可见光波段,包括一个B4近红外,区分地物类型。
下面应用ENVI5.1软件,介绍变换提取Landsat7 ETM+遥感影像特征数据过程。
(1)打开一个Landsat7 ETM+数据。
(2)Toolbox中,选择/Radiometric Correction /Radiometric Calibration,选LC8多光谱数据。
(3)校准类型:点击Reflectnace,指定输出文件的路径和文件名称执行即可
(4)在主界面中,选择File->Save as,选择LC8大气表观反射率定标结果,再点击Spectral Subset按钮,选择后面6个波段。
(5)在Toolbox中,选择Transform/Tasseled Cap。在文件对话框中选择上一步得到的数据文件。
(6)在Tasseled Cap Transform Parameters面板中,传感器类型选择Landsat7 ETM。
(7)选择输出路径和文件名
4 实验结果分析
4.1 光谱特征数据准备
实验选择预处理后的2015年夏季北京市landsat 7多光谱遥感影像,裁剪得到北京市五环内区域。为了进一步去除影像中的噪声和干扰,对影像进行主成分变换。
首先进行主成分正变换,发现前三个主成分已经占据了原始影像中的绝大多数信息,而且自第4主成分起,图像中出现了明显的噪声,所以选取前三个主成分进行主成分逆变换,得到北京市五环内变换后遥感影像,如图1所示。
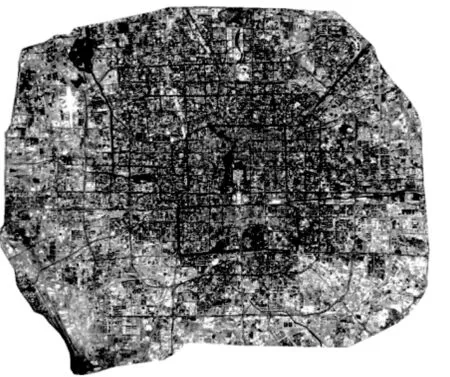
图1 主成分变换影像
通过资料搜集以及观察变换后图像可以发现,研究区域内的主要地物类型有建筑物、植被、道路以及水体,几乎没有裸地,故而分类时将区域内的地物类型区分为建筑物、植被、道路、水体四类。为了最大程度利用影像的信息,选取了信息量最大的第一主成分灰度图像来计算分形维数,如图2所示。
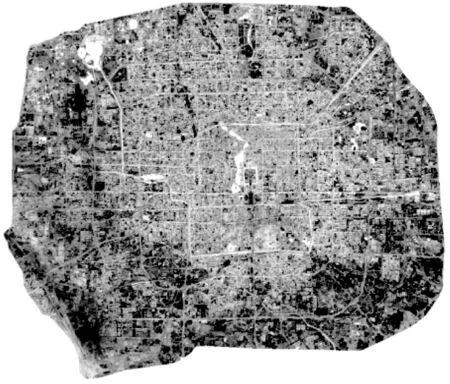
图2 第一主成分
4.2 分形验证
在本实验过程中,试验了3×3,5×5,7×7的窗口以及不同的毯子覆盖的尺度范围,提取纹理特征图像。分析后发现使用5×5大小的窗口,且毯子覆盖的尺度的范围为50-100时提取的纹理最为丰富且最后参加分类得到的效果较好,如表1所示。
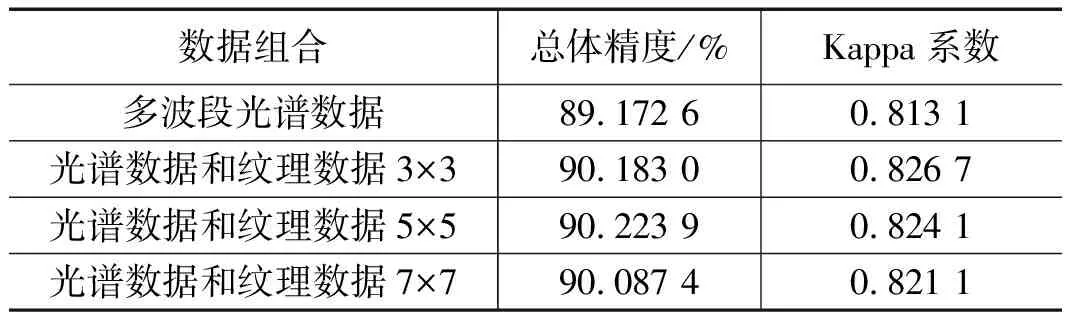
表1 分类精度
从表1可以发现,加入纹理特征后的分类总体精度和Kappa系数相比于纯光谱数据都有提高,总体精度提高了1.051 3%,Kappa系数提高了0.011。这说明了纹理特征与光谱特征结合可以改善分类的效果,基于分形理论的纹理特征有助于分类精度的提高。

图3 毯覆盖算法提取的纹理特征图像
观察图3纹理特征图像可以发现,建筑物密集分布的区域图像亮度较大,代表该区域的纹理复杂;而大面积的植被以及道路和水体等表面较光滑的区域图像亮度偏暗,代表这些区域的纹理复杂度小。这也表明了该图像能够反映出地物的纹理复杂程度。
4.3 分类结果
根据北京市五环内的地物特点,将土地类型分为建筑物、道路、植被、水体四种,并分别选取一定数量的样本。将计算得到的纹理特征与光谱特征结合,使用决策树分类器进行分类;使用相同的样本,使用决策树分类器只对光谱数据进行分类,对分类结果分析比较。分类器的各项参数采用默认值。分类结果如图4,图5。
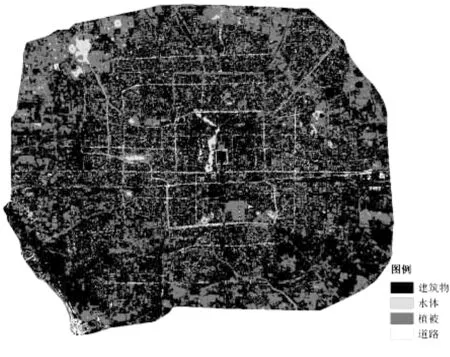
图4 光谱特征和纹理特征结合的分类结果
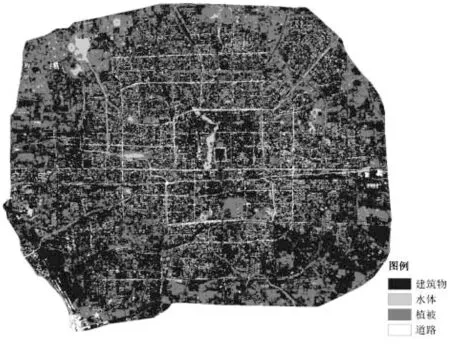
图5 仅利用光谱特征的分类结果
4.4 精度分析
表2和表3可以看出,加入纹理特征数据后,纹理特征明显的道路和植被的分类精度都有所提高。其中道路数据的用户精度提高幅度最大。
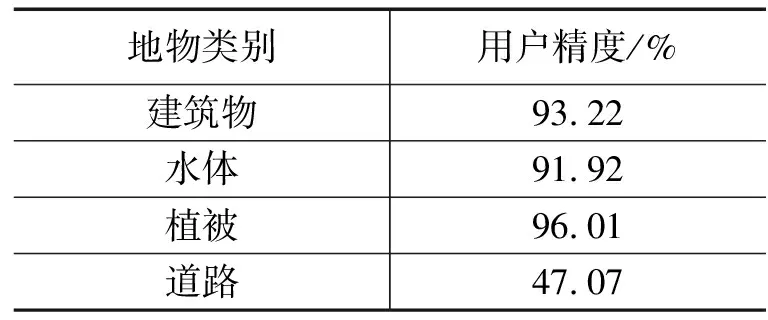
表2 基于光谱特征分类的用户精度
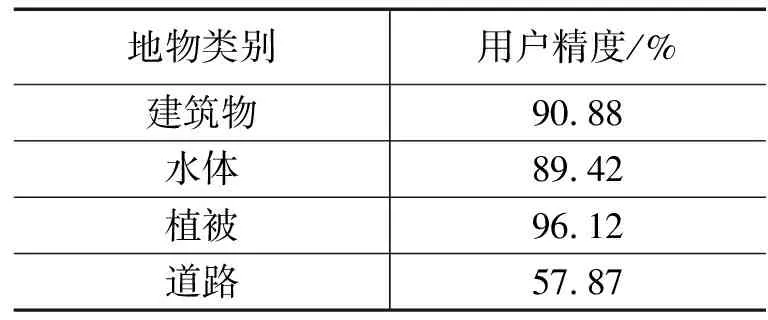
表3 基于光谱特征和纹理特征结合分类的用户精度

图6 纯光谱特征分类结果

图7 光谱特征和纹理特征结合的分类结果
图6和图7可以发现,加入纹理特征后,道路与建筑物的区分度得到较大的提高,部分错分为道路的建筑物重新划分为建筑物。这主要是因为landsat7遥感影像中,道路和建筑物的光谱特征非常接近,只利用光谱特征进行分类时,这两种地物类型容易混淆;但是这两种地物的纹理特征有较大的差别,建筑物的纹理是破碎的块状,而道路的纹理大多数为长条状,两者的纹理复杂度有较大的区别,所以根据纹理特征可以较好的将这两种地物区分开来。
4.5 算法比较
利用改进决策树分类,关于精度评价方面,本文随机采样对其进行精度评价,对于错误的分类借助GPS,实地考察进行纠正,利用了总体分类精度、Kappa系数和混淆矩阵。为了验证算法改进是否有效,对实验结果进行了横向对比,如表4所示。

表4 几种算法比较
由表4可以观察出,与传统Boost Tree分类算法相比,本文改进的组合决策树算法更优越;与C5.0相比,本文设计算法与其相比,分类精度也几乎一样。
5 结论
传统的分类方法局限于遥感影像的光谱特征,容易由于同物异谱、异物同谱等原因造成分类结果精度不高。本文研究表明,利用分形理论可以有效地描述遥感影像的纹理特征。相比于传统的只利用光谱特征改进决策树分类的方法,通过第三方软件ENVI对遥感影像进行了特征提取,融合光谱特征和分形纹理特征有助于决策树分类算法精度的提高,特别是对于纹理特征明显的地物的分类效果更佳。本实验的不足之处首先在于毯覆盖算法只计算出了特定尺度范围下的分形维数,其次是决策树分类算法计算所需时间较长。而当纹理结构不同时,应当选择不同的尺度,才能更好地描述分形特征。在后续的研究中,应当对算法进行改进,采用多尺度分维的方法估算分形维数,从而更好地反映分形特征。
猜你喜欢
闽南师范大学学报(自然科学版)(2022年3期)2022-12-06
湖北大学学报(自然科学版)(2022年3期)2022-12-01
辽宁丝绸(2022年1期)2022-03-29
延安大学学报(自然科学版)(2020年4期)2021-01-15
动漫星空(兴趣百科)(2020年11期)2020-11-09
大众投资指南(2019年20期)2019-12-20
科学Fans(2019年2期)2019-04-11
电子制作(2018年16期)2018-09-26
科学与财富(2016年32期)2017-03-04
电子制作(2017年24期)2017-02-02
