
六连杆压力机的运动学研究
2018-07-23 06:21陈启升胡进芳潘国富别世清祁全新
锻压装备与制造技术 2018年3期
陈启升,胡进芳,潘国富,别世清,祁全新
(山东高密高锻机械有限公司,山东 高密 261500)
机构运动分析的任务是在给出已知机构尺寸参数及主动件运动规律的前提下,确定机构中其余构件上某些点的轨迹、位移、速度及加速度和构件的角位移、角速度及角加速度[1]。
六连杆压力机机构由于尺寸参数较多,运动要求复杂,传统的图解法虽然具有简捷直观的优点,但是精度较低,很难满足实际设计要求。而解析法虽然运算复杂,但是随着计算机技术的不断发展,特别是Matlab、Origin等数学软件的出现,使得解析法越来越受到人们的关注,我们有理由相信在不远的将来,解析法将逐步取代传统的图解法[2]。
1 六连杆机构的运动模型
机械式压力机的传动机构为曲柄滑块机构,首先曲柄在电机的带动下作旋转运动,然后经过曲柄滑块机构的传动,转换成滑块的上下往复运动,通过滑块机构对工件施压强大的压力来完成坯料的加工成形工艺[3],曲柄滑块机构工作原理如图1所示。
六连杆压力机又被称为肘杆压力机,其机身结构比较紧凑、刚性也较强,滑块下滑时速度较低且比较平稳,回程速度较快,具有慢进急回的特性,工作效率较高,其工作时的冲压力与工艺力较大,工作区域较长[4]。六连杆机构的压力机主要用于需要较大工艺力的板件的冲压工作,如较厚钢板的落料、成形、冲孔等。
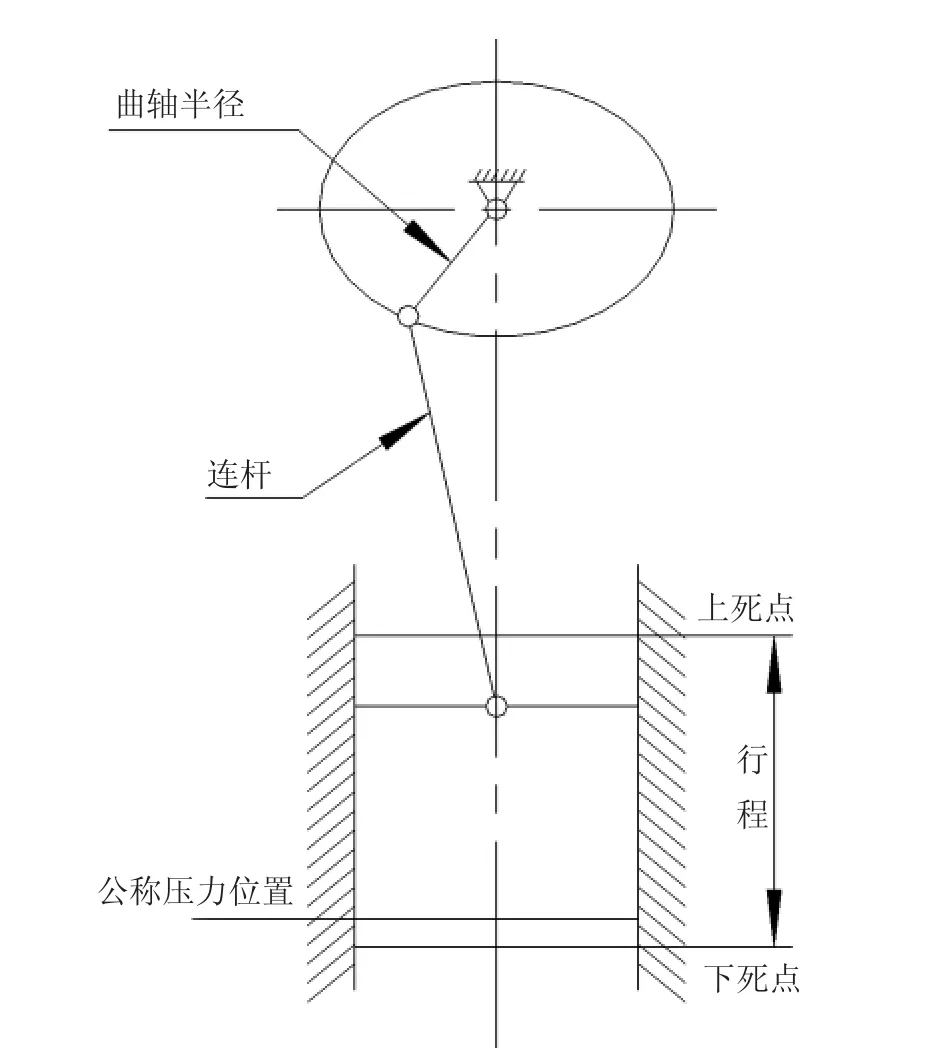
图1 曲柄滑块机构
六连杆机械式压力机的传动机构为六连杆机构,其结构简图如图2所示。
各符号的物理意义及数据如表1所示。
2 运动分析及基本关系式的建立
机构运动分析的任务是在已知机构尺寸及原动件运动规律的情况下,确定机构中其他构件上某些点的轨迹、位移、速度及加速度和构件的角位移、角速度及角加速度[5]。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械动力性能的必要前提。
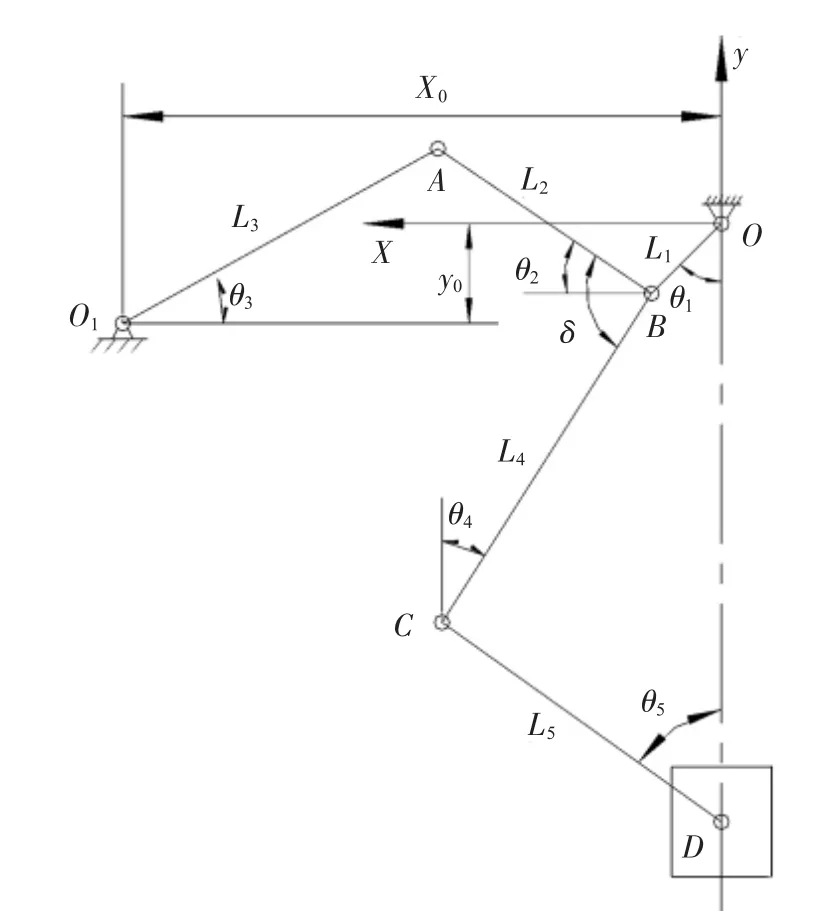
图2 六连杆机构简图

表1 符号的物理意义及数据
机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或者某几个位置的运动特性时,采用图解法会比较方便,而且精度也能满足实际问题的需要。而当需要精确知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可以获得很高的计算精度及一系列位置的分析结果,并能绘制出机构相应的运动曲线,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。由于对六连杆机构进行运动分析需要知道每个杆件在一系列位置的运动特性,因此,采用解析法对六连杆机构进行运动特性分析。
用解析法作机构的运动分析,应首先建立机构的位置方程式,然后将位置方程式对时间求一次和二次导数,即可求得机构的速度和加速度方程,进而解出所需位移、速度及加速度,完成机构的运动分析[6]。
由图1中几何关系可知:

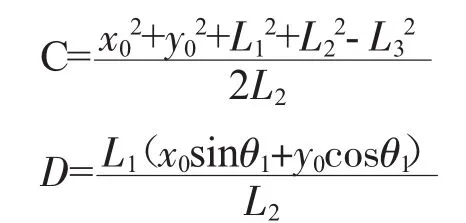
将 A、B代入式(1),整理得

式中:
将式(2)两端平方得

解得

根据机构的初始安装情况和机构运动的连续性来确定式中 号的选取。对于本机构而言,结果取正号。即

在图1中,有

由式(3)可得

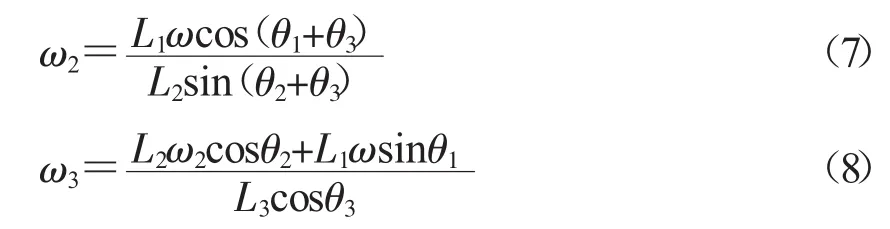
对式(3)、(4)进行求导,得

式中:ω、ω1、ω3分别为曲柄 L1、杆 L2、杆 L3的角速度,解得
对式(7)求导,得杆L2角加速度

对式(8)求导,得杆L3角加速度

由图1还可得出

对式(9)求导,得杆L5角速度

对式(10)求导,得杆L5角加速度

通过上述计算,建立了机构中各参数间的基本关系式,得到了各杆件的角位移、加速度以及角加速度。为下面求得滑块的位移、速度以及加速度做好了基础。当L1、L4、L5在一条直线上时,滑块处于下死点位置,此时滑块处于最远的极限位置[7],如图3所示。
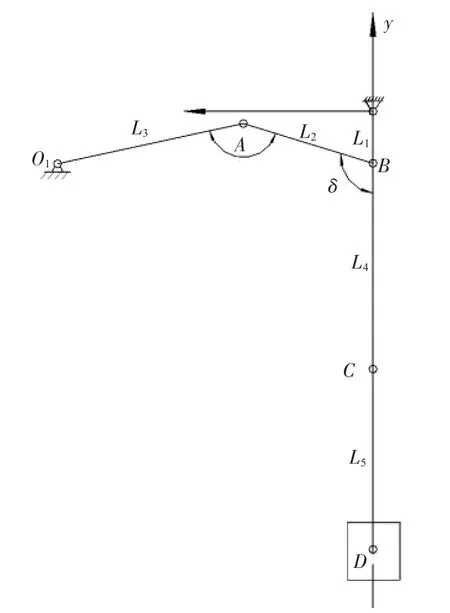
图3 六连杆机构下死点位置
取滑块在下死点位置为位移S的计算起点,则

将式(11)对时间求导,可得滑块的速度

将式(12)对时间求导,可得滑块的加速度

利用解析法求得六连杆机构的运动学方程,但由于方程比较复杂,里面的未知数有很多,所以对方程的求解很繁琐,要想直接得到求解结果非常困难,需要借助于Matlab等计算机求解软件来进行求解,而且建模求解的过程也非常繁琐[8]。所以后面继续借助计算机分析软件六连杆机构的运动进行直观分析。
3 结束语
本文主要对六连杆压力机的传动机构进行了运动分析,建立了六连杆机构的运动模型以及机构中各参数之间的基本关系式,得到各个杆件的角位移、加速度以及角加速度,并以此为基础,求出了滑块的位移、速度以及加速度。
猜你喜欢
贵州大学学报(自然科学版)(2022年6期)2022-12-26
南宁师范大学学报(自然科学版)(2022年1期)2022-05-10
锻压装备与制造技术(2021年2期)2021-07-19
锻压装备与制造技术(2021年2期)2021-07-19
液压与气动(2020年4期)2020-04-10
信阳师范学院学报(自然科学版)(2018年1期)2018-08-09
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
青年文学家(2017年35期)2017-12-26
设备管理与维修(2016年5期)2016-03-16
