地面运动目标的多UAV协同搜索方法
2018-06-28 09:08:42曾国奇丁文锐
系统工程与电子技术 2018年7期
曾国奇, 白 宇, 林 伟, 丁文锐
(1. 北京航空航天大学无人系统研究院, 北京 100191; 2. 北京航空航天大学电子信息工程学院, 北京 100191)
0 引 言
随着通信技术、自动控制和智能技术的迅速发展,无人机(unmanned aerial vehicle, UAV)己被广泛应用于搜索、侦察及监视等任务,其中对运动目标的搜索与追踪问题因其较高的实际应用价值而受到国内外学者的广泛关注[1-8]。
由于运动目标搜索问题的应用场景复杂多变,由此产生的搜索方案也种类多样。文献[1-3]根据地面公路网监视传感器提供的运动目标在各个节点的运动信息来预测目标的位置,从而制定搜索路径对目标进行搜索;文献[4]研究了在跟踪地面目标过程中丢失目标后对运动目标的重新搜索问题,根据目标已有运动信息如速度与丢失时间,对其位置进行预测并设计相应的路径进行搜索;而当被搜索目标的运动信息不足时,文献[5]建立了不确定运动目标模型来研究相应搜索方案;文献[6-7]建立了Markov运动目标模型来研究最优搜索者路径问题;而文献[8]则建立了基于优化的搜索分配博弈模型来求解对运动目标的最优搜索方案。
由于单UAV的搜索能力有限,运动目标的搜索问题的解决方案多采用多无人机(multi-unmanned aerial vehicle, multi-UAV)协同执行任务[9-12],在对multi-UAV协作问题的研究[13-18]与多目标任务问题的研究[19-20]基础上,multi-UAV对静态目标的搜索问题[21-26]及multi-UAV对运动目标的搜索问题[27-32]均被从不同角度研究。文献[9]预测目标出现的概率,使用multi-UAV协同对任务区域进行搜索,通过算法设计提高目标的发现概率,但其发现概率比较低。文献[11]则针对搜索区域中的运动目标提出了运动目标垂线搜索算法与运动目标斜线搜索算法,这2种算法使用multi-UAV协同搜索并设计出一定的重叠区域,利用重叠区域来防止运动目标逃离探测范围,当运动目标速度限定在一定范围内时,这两种方法可以使目标发现概率为1,但其探测重叠区域的设置固定,实现目标发现概率为1的目标速度上限也是固定的,不能根据实际情况调整且对速度较大的目标搜索能力不足。文献[12]在MTVL算法的基础上,提出了multi-UAV对角线斜阵排列进行搜索的方法,有效利用UAV的位置排列来减少搜索盲区,提高了使目标发现概率为1的运动目标速度上限,但其仍有重叠区域设置固定与对速度较大的目标搜索能力不足的缺点。
针对现有multi-UAV对运动目标搜索方法重叠区域设置固定而不能适应不同应用场景的缺点,建立了UAV对运动目标回寻式搜索的数学模型。该模型通过设置搜索回寻速度与搜索推进速度确定不同的搜索重叠区域来抵消目标的运动以减小搜索盲区。对运动目标的发现概率会随着重叠区域的增大而增大,但重叠区域的增大会导致搜索速率降低甚至搜索无效,如何根据实际应用需求设置合适的重叠区域成为关键问题。本文权衡目标发现概率与搜索速率两个重要指标,结合实际应用对指标的不同需求侧重得出搜索效果优化函数,以搜索回寻速度与搜索推进距离为参数对模型进行优化从而得到任务环境中的优化搜索方案。得到的搜索方案拥有在当前任务环境与应用需求条件下最优的搜索重叠区域,即在保证了任务需要的搜索速率的同时,最大限度地提高了运动目标的发现概率。同时为了解决单UAV搜索能力不足的问题,采用多架UAV并排回寻式搜索,可以进一步提高搜索效率。
因此,本文的多机并排回寻式搜索方法可以提高搜索效率,搜索模型可在不同环境条件下得出最优的搜索方案,提高了搜索方法对任务环境的适应性。
1 UAV搜索问题描述
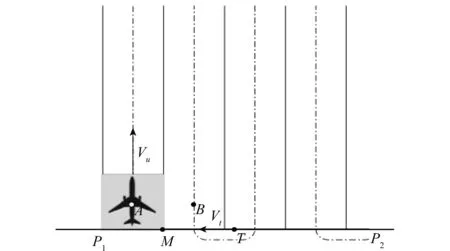
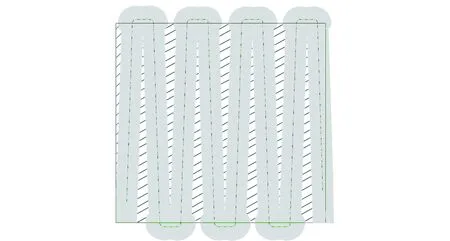
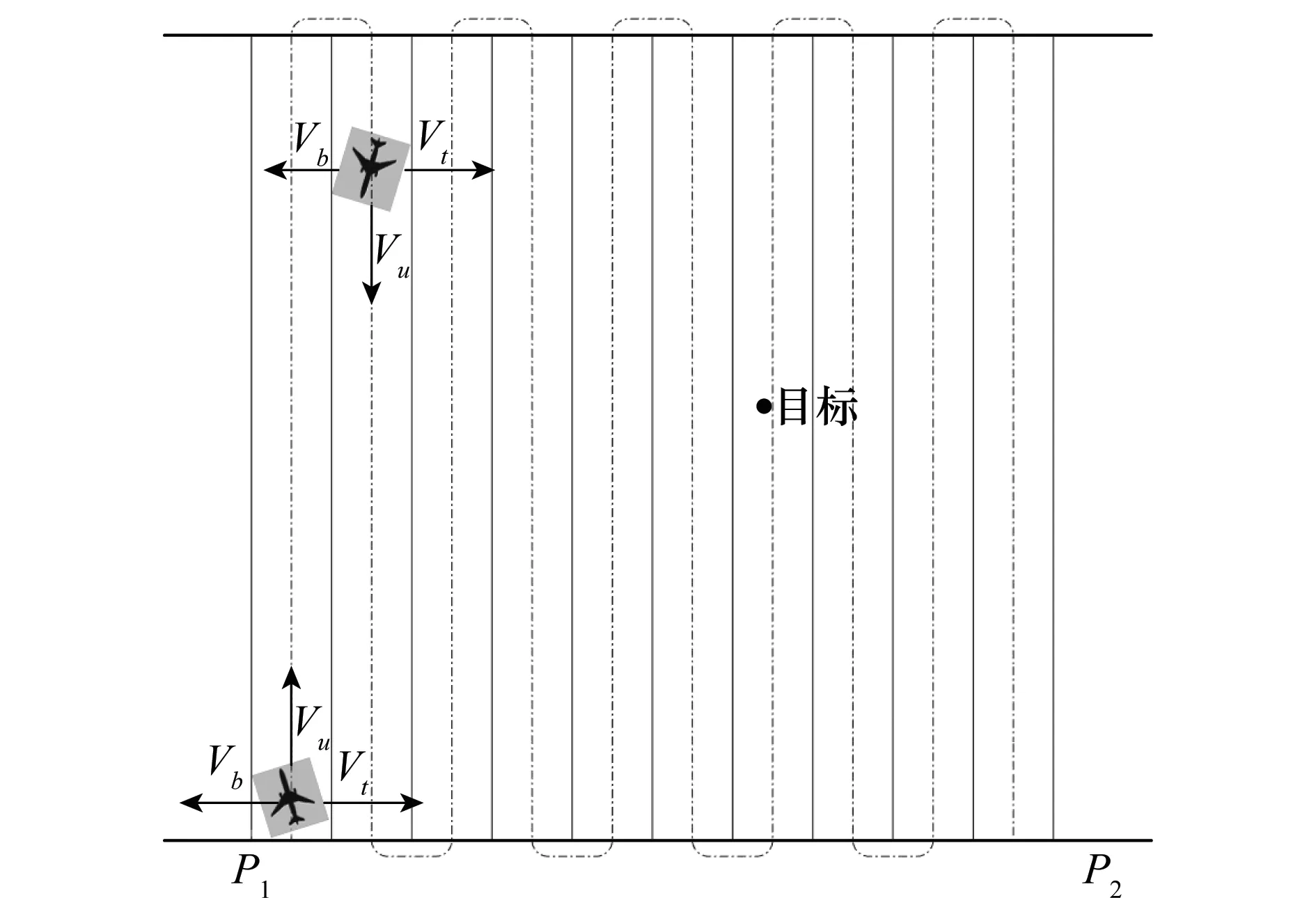
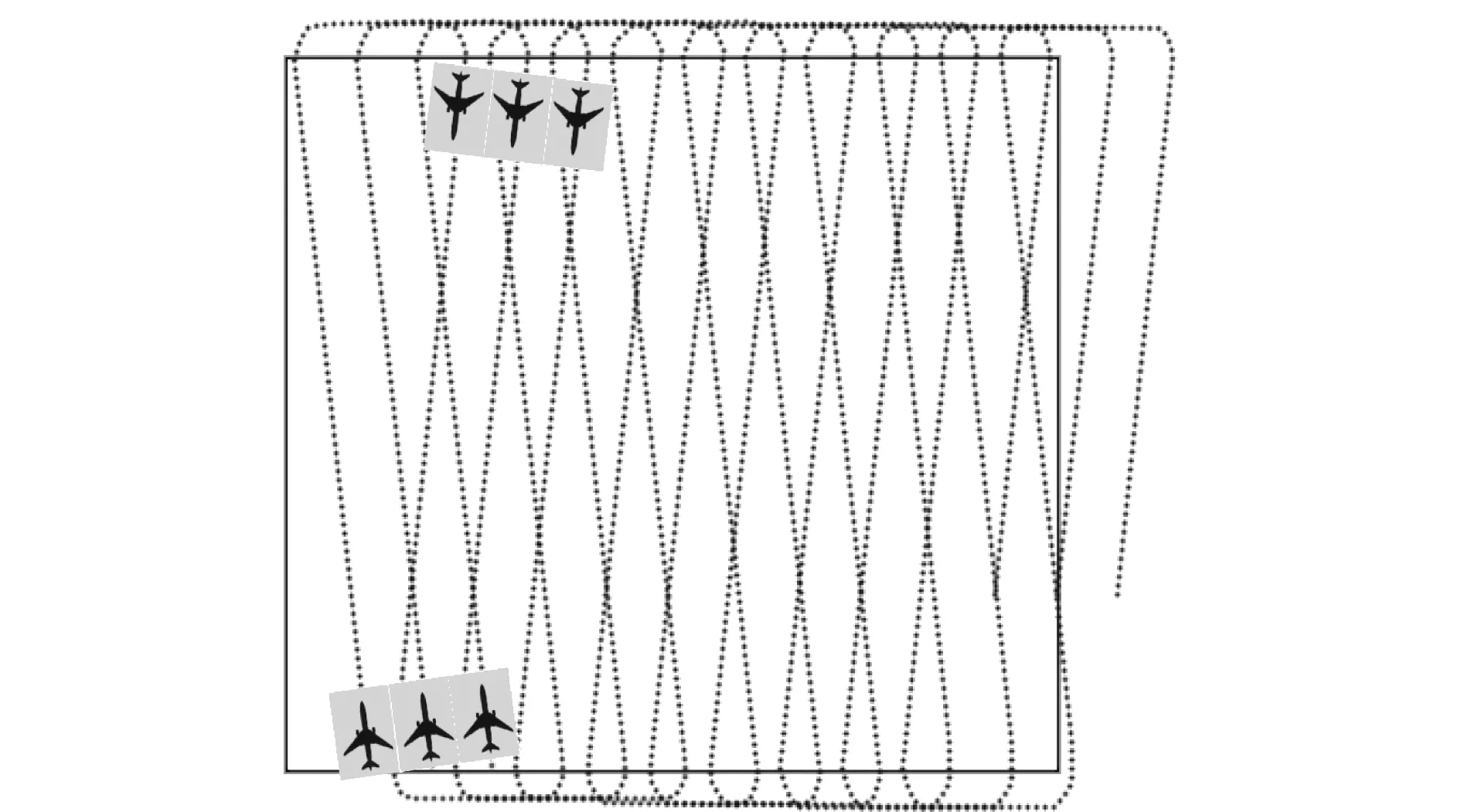
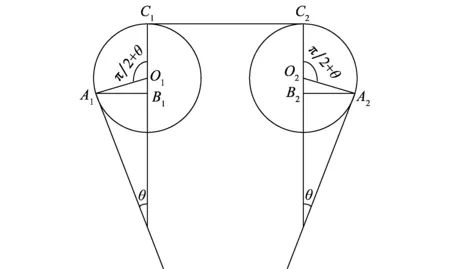
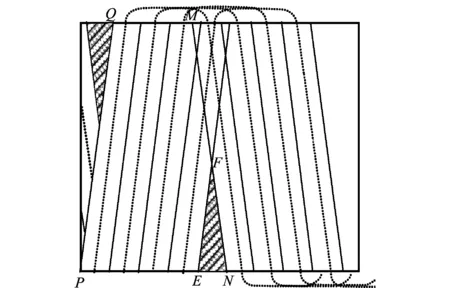
搜索任务区域S∈R2,如图1所示,区域S为2条间隔宽度为L的平行边界P1P2与Q1Q2组成的带状区域,P1Q1边界左侧为已经确定的无目标区域,即要搜索的运动目标只可能出现在P1Q1边界右侧。UAV的飞行速度为Vu,且UAV速度与飞行高度一直保持恒定值,UAV最小转弯半径为Ru,UAV探测载荷传感器的探测范围为一个Da×Db的矩形,其中Da为横向探测直径距离,Db为纵向探测直径距离,其对应的探测半径为Ra与Rb,该探测范围在UAV正下方。设区域S内有且仅有一个地面移动目标,目标在该区域内的初始位置为等概率均匀分布,其运动速度为Vt(Vt UAV在对区域S进行扫描搜索时,一般应遵循如下规则:从下边界(或上边界)进入搜索区域,沿最左边界开始飞行,到达上/下边界后按照UAV最小转弯半径转弯,层层向右扫描式搜索。 图1 UAV搜索运动目标Fig.1 UAV search for moving targets 由于目标在垂直方向的运动范围限制在区域S的两条平行边界内,其垂直方向的速度有限,根据UAV的层层扫描方法,目标在垂直方向的运动速度不会影响搜索结果,因此设定目标只有水平方向的速度。由于UAV由左向右层层扫描,当运动目标由右向左运动时才有可能逃离UAV的扫描范围,因此设定目标的运动速度Vt方向为水平向左。 此问题虽然以单一的运动目标作为搜索对象,当场景中有多个目标时,只要目标的水平运动速度小于Vt,同样能被搜索到,因此本搜索问题同样可以适应于多目标搜索问题。该问题模型可以应用于海面带状区域、河道漂流目标的巡逻搜索,边界防突防等搜索侦查任务。 为了防止运动目标逃进已经搜索过的区域而丢失目标,对运动目标的覆盖式搜索需要对已经搜索过的区域进行“复检”,通过设置不同的回寻速度可以实现不同程度的复检。回寻法是设置搜索重叠区域的方法之一,增大回寻速度可以增加搜索的重叠区域。 一般,静态目标区域覆盖搜索方法主要以扫描式搜索为主,如图1所示,图1中虚线部分为UAV搜索航迹。UAV从区域S的左下角出发垂直向上扫描,当扫描范围到达上边界时,以最小转弯半径Ru向右转,直线飞行一小段距离后,再以半径Ru向右转开始垂直向下进行扫描,以此类推,且相邻垂直扫描线之间的间隔为UAV横向探测直径距离Da。 使用此方法搜索区域内静止目标时,可以保证目标发现概率为1,而将此方法用于搜索运动目标时,如图2所示,假设UAV由A点出发,运动目标沿区域S的下边界P2P1由右向左以速度Vt运动,在UAV飞到B点之前,区域S的下边界P2P1完全处于UAV监控范围外,如果目标在UAV飞到B点之前已经到达M点,则运动目标“逃逸”成功,即UAV搜索任务失败。考虑最坏的情况,如果UAV从A点出发的同时,运动目标刚好到达M点,在这种情况下,无论UAV飞行速度有多快,搜索任务都会失败。 图2 运动目标“逃逸”图Fig.2 Sketch map of moving target escape 由此可见,由于该扫描方法没有设置搜索重叠区域,在搜索运动目标的过程中存在一定盲区,以运动目标为参考建立坐标系,则UAV相对于目标有向右的运动速度Vt,等效的搜索覆盖图如图3所示,斜线阴影部分为搜索盲区,当运动目标处于搜索盲区时,UAV将无法搜索到该目标。 图3 传统扫描搜索等效覆盖图Fig.3 Equivalent coverage graph for traditional search method 为了减小图3中的搜索盲区,以运动目标为参考建立坐标系,得到等效的搜索覆盖图如图4所示。在该坐标系中,目标相对静止,UAV相对于目标以水平向右的速度Vt运动,为了减小由速度Vt造成的搜索盲区,需要给UAV一个与Vt方向相反、大小相等的速度Vb来抵消Vt,使UAV在水平方向上相对于目标的运动速度为0。图4中虚线表示UAV相对于目标的扫描路径,可以看出此时目标发现概率为1。 图4 回寻搜索等效图Fig.4 Equivalent graph for searching back 将上述扫描路径转到以地面作为参照所建立的坐标系中,可得UAV实际飞行路径如图5所示,可见UAV偏向已经搜索过的区域进行复检,所以称之为“回寻式搜索”。UAV实际飞行速度由水平向左的速度Vb与垂直方向的速度Vu合成,此时UAV路径有一个向左的倾斜角θ,且tanθ=Vb/Vu。 图5 单UAV回寻式搜索路径Fig.5 Single UAV path for searching back 在回寻式搜索方法的基础上,建立统一multi-UAV并排回寻式搜索问题数学模型。该模型描述如下: 图6 multi-UAV回寻式搜索路径Fig.6 Multi-UAV path for searching back 步骤2当一架UAV到达上边界时,进入调头区域如图7所示,UAV到达A1点时,按最小转弯半径|A1O1|=Ru右转到方向水平向右的位置C1点,然后水平飞行一段距离lc到达C2点,再按最小转弯半径Ru右转到斜向左下方且与竖直方向夹角为θ的位置A2点,然后向下边界飞行,在整个调头过程中(从A1点飞行到A2点),飞行速度恒为Vu不变,2次转弯的飞行总路程为l1,转弯时间为t1,水平飞行阶段距离为lc,水平飞行时间为tc。 图7 调头区域Fig.7 U-turn area 步骤3当UAV到达下边界时,与步骤2类似进入调头区域,按最小转弯半径左转到水平向右的方向,水平飞行一段距离后,再按最小转弯半径左转到斜向左上方,然后向上边界飞行,进入步骤1,并依此规则循环。 由上述模型的描述可看出,搜索区UAV水平方向的回寻速度Vb与调头区水平飞行距离lc为决定搜索方案的主要参数,其中水平飞行距离lc的取值决定了UAV搜索推进速率。通过设置Vb与lc可以确定搜索重叠区域,且确定Vb与lc的取值可以唯一确定UAV的飞行路径,因此Vb与lc的取值决定了实际搜索效果。 基于以上飞行规则,可以建立以搜索区UAV水平方向的回寻速度Vb与调头区水平飞行距离lc为主要参数的multi-UAV对运动目标的搜索模型,并以运动目标的搜索效果——目标发现概率P与搜索速率Ve为主要指标,通过模型计算得出参数Vb、lc与指标P、Ve的关系。 在地面坐标系中可得到UAV与目标运动时间与路程的相关信息: UAV在搜索区域与调头区域各阶段飞行时间为 (1) (2) (3) 设UAV在调头区水平方向的推进距离|A1A2|为la,则有 la=2Rucosθ+lc (4) 由于在调头过程中没有为UAV设置回寻速度,为了使UAV在调头过程不产生额外的盲区,UAV水平推进距离la需要减去调头过程中目标的运动距离以消除调头过程中由目标运动产生的盲区,则la应满足的要求为 (5) 联立式(2)~式(5),可得lc,即 (6) 则由式(6)可知,lc主要由α、λ调节,则回寻式搜索模型的主要参数lc与Vb可变为以下参数:α、λ、Vb。 UAV搜索速率是搜索效果的重要指标之一,当模型设置的重叠区域过大时,UAV无法向右推进搜索,严重时会在原位置陷入“8字飞”状态。使用有效推进速率来表示UAV的搜索速率,半个搜索周期内(飞行时间t0+t1+tc所对应的飞行阶段),UAV在水平方向推进的距离为lh=la-Vbt0,则UAV的搜索有效推进速率为 (7) 若lh≤0则UAV无法向右推进搜索,搜索任务将无法执行,因此在设置Vb的取值时,应保证lh>0,即搜索速率指标对模型参数的限制条件 (8) multi-UAV对运动目标搜索效果的另一个主要指标为目标发现概率,此发现概率可以通过求解模型在参数条件下的搜索盲区来得到。 (9) (10) 运动目标等效搜索覆盖图如图8所示,图8中阴影部分为搜索盲区,设|EN|=len,|PN|=lpn,|PE|=lpe,设半个搜索周期内盲区面积为Sloss,总面积为Sall,则目标发现概率P为 (11) 其中,总面积为 (12) 图8 运动目标等效搜索覆盖图Fig.8 Equivalent coverage graph for moving target search (13) (14) (15) (1)当lpe≥lpn时,盲区底边|EN|不存在,则盲区面积Sloss=0; (2)当lpe (16) 综上所述,式(7)与式(11)即为回寻搜索模型的结果输出,式(7)表示搜索速率,式(11)表示目标发现概率。当参数设置使得搜索方案的重叠区域变大时(设置使Vb增大或lc减小可以增大重叠区域,减少搜索盲区),目标发现概率会增大,但搜索速率会降低;相反,当参数设置使得搜索方案的重叠区域减小时,目标发现概率会减小,而搜索速率会提高。值得注意的是,搜索速率决定了任务结束的时间与UAV的燃料消耗。因此,需要结合实际应用的需求与UAV资源来权衡搜索速率与目标发现概率指标,例如任务对发现概率要求严格,而对搜索速率要求不高,且UAV燃料充足,则可以将搜索效果的定义侧重于目标发现概率。 由第2.3节的搜索模型可看出,一个搜索方案的确定需要确定的参数有:UAV数目n,回寻速度Vb,重叠设置参数α,调头盲区消除参数λ。 (1)传统单UAV扫描方法参数对应为:n=1,α=0,λ=0,Vb=0,代入第2.3节模型,可得目标发现概率为 (17) 由式(17)可知,当搜索静态目标时,传统单UAV扫描法的目标发现概率为1,而当目标为运动目标时,随着运动目标的速度Vt提升,目标发现概率迅速下降,若在相同的Vt条件下,要提高目标发现概率,只能缩短扫描区域的宽度L,如将L平分,使用2架UAV对2个区域分别进行扫描搜索。 (2)单UAV回寻式搜索参数设置为:n=1,α=0,λ=1,0 (18) 由式(18)可知,在单UAV回寻式搜索过程中,当运动目标速度不大于UAV回寻速度时,目标发现概率为1,当运动目标速度大于UAV回寻速度时,才开始产生搜索盲区,Vt-Vb的值越大目标发现概率越小。则Vb的取值越大,目标发现概率P越大,使P=1的Vt取值上限越大,而UAV搜索有效推进速率Ve会减小,因此Vb的取值应综合考量P与Ve,二者均为搜索效果指标。 (3)文献[11]中multi-UAV垂线搜索算法的参数对应为:n>1,α=2,λ=0,Vb=0,代入第2.3节模型,可得目标发现概率为 (19) (20) 由式(19)和式(20)可知,在其他条件相同的情况下,若要提高目标发现概率,需要减小搜索区域宽度L,增大UAV数目n,提高UAV搜索速度Vu。由于没有回寻速度,使P=1的Vt取值上限由UAV飞行速度Vu与搜索区域宽度L决定,从第2.3节模型可以得出,此取值上限与搜索重叠参数α有关,为αRaVu/(2L),α取值越大,使P=1的Vt取值上限越大,而UAV搜索有效推进速率Ve会减小,因此α的取值应综合考量权衡P与Ve这2个搜索效果指标。 回寻搜索方法在搜索区域使用Vb抵消目标运动速度Vt产生的盲区,而在调头区域则使用调头盲区消除参数λ来抵消目标运动速度Vt产生的盲区,则在回寻方法中应取λ=1。 由第2.3节运动目标的搜索模型与第2.4节的几种搜索策略的参数取值可知,设置并增大回寻速度Vb与重叠设置参数α均可提高目标发现概率P,且可以提高使P=1的Vt取值上限Vtm,而二者的提高均会使UAV搜索有效推进速率Ve减小,因此Vb与α的取值应综合考量搜索效果指标P与Ve,当对目标发现概率要求严格时,则应将使P=1的Vt取值上限Vtm作为搜索效果指标代替目标发现概率指标考虑进来。 设参数w∈[0,1]是用来调节目标发现概率与搜索速率2个指标在搜索效果中所占的权重,其取值应根据实际应用场景情况进行赋值。极端情况下,若取w为0,则得出的搜索方案不考虑目标发现概率,只考虑搜索速率,这样的方案将不设任何重叠区域,即为传统的扫描搜索方法;若取w为1,则得出的搜索方案只考虑目标发现概率,而不考虑搜索速率,得出的方案将最大化重叠区域,导致搜索效率过低。因此,需要根据实际应用场景需求为w赋值。 引入权重调节参数w后,优化目标函数为 f(Vb,α)=wVtm+(1-w)Ve (21) (22) (23) 则最优化的参数为 (24) 式中,0 考虑实际应用场景:L=20 000 m,Ra=2 000 m,Rb=2 000 m,Ru=1 000 m,Vu=50 m/s,n=4,λ=1。 将上述实例取值代入搜索模型,并设置不同的权重参数w,通过参数扫描得出最优参数:以0.01为步长对参数Vb、α在其取值范围内进行扫描搜索,得到满足式(24)的参数即为最优参数。则w取不同值时,对应的优化参数如表1所示。 表1 优化参数列表 将multi-UAV垂线扫描搜索方法与本文优化策略在同种条件下进行实验与比较,即设基本环境条件为:L=20 000 m,Ra=2 000 m,Rb=2 000 m,Ru=1 000 m,Vu=50 m/s,n=4。 (1) multi-UAV MTVL算法的参数设置为:n=4,α=2,λ=0,Vb=0; (2) 当取w=0.8,即注重目标发现概率时,参数优化后的multi-UAV回寻搜索法的参数设置为:n=4,α=3.44,λ=1,Vb=7.05 m/s; (3) 当取w=0.2,即注重UAV推进速率时,参数优化后的multi-UAV回寻搜索法的参数设置为:n=4,α=0,λ=1,Vb=5.95 m/s。 则将以上参数分别代入第2.3节数学模型中,可得到3种方案目标发现概率与运动目标速度的关系如图9所示,搜索速率与运动目标速度的关系如图10所示。 图9 不同策略目标发现概率比较Fig.9 Comparison of different strategies for target discovery probability 图10 不同策略有效推进速率比较Fig.10 Comparison of different strategies for effective advance rate 由图9可知,3种搜索方案的目标发现概率都会随着目标运动速度的增大而减少,与垂线搜索方法相比,在相同运动目标速度下,基于本文的搜索方法,发现概率更大;在同等发现概率下,可以发现更大速度的运动目标。由图9和图10可知,本文方法是通过适当减小搜索速率来换取更好的搜索效果。 取w=0.2时的多机回寻法(注重UAV搜索有效推进速率的方案)与垂线搜索对比,在目标运动速度相同的情况下目标发现概率比较如表2所示。 表2 不同策略的发现概率 由表2可以看出,当目标运动速度增加时,多机回寻法与垂线搜索方法相比,发现概率的提高百分点越来越大,当目标速度达到40m/s时,多机回寻法比垂线搜索法的目标发现概率提高达15个百分点。 本文研究了multi-UAV对运动目标搜索问题,为了提升multi-UAV对运动目标的搜索效率,提出了multi-UAV并排回寻式搜索方法,并以回寻速度与推进距离为参数构建了协同搜索数学模型。通过对模型参数进行优化,可得出适用于不同应用场景的最优搜索方案。因此,本文主要成果为建立了适用于不同场景的multi-UAV对运动目标搜索的数学模型,可通过该模型获得具体应用任务的最优搜索方案,在提高搜索效果的同时,增强了搜索方法的环境适应性。 参考文献: [1] KRISHNAMOORTHY K, CASBEER D, PACHTER M. Minimum time UAV pursuit of a moving ground target using partial information[C]∥Proc.of the International Conference on Unmanned Aircraft System, 2015: 204-208. [2] CASBEER D, KRISHNAMOORTHY K, CHANDLER P, et al. Moving ground target isolation by a UAV using predicted observations[C]∥Proc.of the 53rd IEEE Conference on Decision and Control, 2014: 4284-4289. [3] KRISHNAMOORTHY K, CASBEER D, CHANDLER P, et al. UAV search & capture of a moving ground target under delayed information[C]∥Proc.of the 51st IEEE Conference on Decision and Control, 2012: 3092-3097. [4] ZHAO C C, ZHU M, LIANG H, et al. The sustainable tracking strategy of moving target by UAV in an uncertain environment[C]∥Proc.of the 35th Chinese Control Conference, 2016: 5641-5647. [5] BERTUCCELLI L F, HOW J P. UAV search for dynamic targets with uncertain motion models[C]∥Proc.of the 45th IEEE Conference on Decision and Control, 2006: 5941-5946. [6] 张献,任耀峰,沈静.连续时空最优搜索者路径问题的改进双链遗传算法[J].系统工程与电子技术,2015,37(5):1092-1098. ZHANG X, REN Y F, SHEN J. Improved double chains genetic algorithm for optimal searcher path problem in continuous time and space[J].System Engineering and Electronics,2015,37(5):1092-1098. [7] 张献, 任耀峰, 王润芃. 基于自适应遗传算法的连续时空最优搜索路径规划研究[J].兵工学报,2015,36(12):2386-2395. ZHANG X, REN Y F, WANG R F. Research on optimal search path programming in continuous time and space based on an adaptive genetic algorithm[J].Acta Armamentarii,2015,36(12): 2386-2395. [8] GAO C Y, ZHAO Z Y.An optimal allocation approach of cooperative search capability based on game theory[C]∥Proc.of the 2nd International Conference on Systems and Informatics, 2014: 63-67. [9] 符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域搜索算法[J]. 系统工程与电子技术, 2016, 38(4): 821-827. FU X W, WEI G W, GAO X G. Cooperative area search algorithm for multi-UAVs in uncertainty environment[J]. Systems Engineering and Electronics, 2016, 38(4): 821-827. [10] 吴楠,吴庆.面向不确定目标的多无人机协同搜索控制方法[J].计算机应用与软件,2015, 32(2): 174-177. WU N, WU Q. Cooperative search control method with multi-uavs for uncertain targets[J]. Computer Applications and Software, 2015, 32(2): 174-177. [11] 轩永波, 黄长强, 吴文超, 等. 运动目标的多无人机编队覆盖搜索决策[J]. 系统工程与电子技术, 2013, 35(3): 539-544. XUAN Y B, HUANG C Q, WU W C, et al. Coverage search strategies for moving targets using multiple unmanned aerial vehicle teams[J]. Systems Engineering and Electronics, 2013, 35(3): 539-544. [12] 王勋,姚佩阳,梅权.多无人机协同运动目标搜索问题研究[J].电光与控制, 2016, 23(8): 18-22. WANG X, YAO P Y, MEI Q. On multi-UAV cooperation for moving target searching[J]. Electronics Optics & Control, 2016, 23(8): 18-22. [13] GYEONGTAEK O, YOUDAN K. Market-based distributed task assignment of multiple unmanned aerial vehicles for cooperative timing mission[J]. Journal of Aircraft, 2017, 54(6): 2298-2310. [14] BILAL Y K, WILLIAM J C, PETER H. Dynamic resource allocation for efficient sharing of services from heterogeneous autonomous vehicles[J]. Journal of Aerospace Information Systems, 2016, 13(12): 450-474. [15] WEN Y L, LIU L, WANG Z, et al. Multi-UAVs target assignment using opposition-based genetic algorithm with multiple mutation operators[C]∥Proc.of the Modeling and Simulation Technologies Conference, 2016: 3677-3684. [16] LEBSEWORK N, KIM S H, CHOI H L. Distributed observes for cyberattack detection and isolation in formation-flying unmanned aerial vehicles[J]. Journal of Aerospace Information Systems, 2017, 14(10): 551-565. [17] YANG L, PAN Q, ZHAO C H, et al. Autonomous stereo vision based collision avoid system for small UAV[C]∥Proc.of the Information Systems-AIAA Infotech @ Aerospace, 2017:1150-1161. [18] JOSEPH A J, JOVAN B, DAVID D. Improving sense and avoid using multi-modal sensor fusion for non-communicating threats[C]∥Proc.of the Guidance, Navigation and Control Conference, 2016:1628-1651. [19] NATHANIEL M, JONATHAN R. Simultaneous tracking of multiple ground targets from a single multirotor UAV[C]∥Proc.of the Atmospheric Flight Mechanics Conference, 2014:2670-2688. [20] ZOU X Y, ROB A, JOHN M. Testing method for multi-UAV conflict resolution using agent-based simulation and multi-objective search[J]. Journal of Aerospace Information Systems, 2016, 13(5): 191-203. [21] TRISTAN S, JOSHUA T, TRISTAN C, et al. Cooperative search and rescue using autonomous unmanned aerial vehicles[C]∥Proc.of the Information Systems-AIAA Infotech @ Aerospace, 2018:1490-1507. [22] ZHANG R W, SONG B F, PEI Y, et al. Agent-based analysis of multi-uav area monitoring mission effectiveness[C]∥Proc.of the Modeling and Simulation Technologies Conference, 2017:3151-3160. [23] YANG Y, POLYCARPOU M M, MINAI A A. Multi-UAV cooperative search using an opportunistic learning method[J]. Journal of Dynamic Systems Measurement & Control, 2007, 129(5):716-728. [24] UGUR Z, ATILLA D. Cooperative target tracking for autonomous UAVs in an adversarial environment[C]∥Proc.of the Guidance, Navigation and Control Conference and Exhibit, 2006:6461-6475. [25] ANDREW K S, HUGH H T. Cooperative UAV search for moving targets using a modified diffusion uncertainty model[C]∥Proc.of the Guidance, Navigation and Control Conference, 2009:5779-5797. [26] COREY A I, DAVE P, MATTHEW F, et al.Intelligent decentralized unmanned aerial survey of volcanic plumes[C]∥Proc.of the AIAA Infotech @ Aerospace, 2016:921-935. [27] VITALY S, TAL S. Unmanned aerial vehicles cooperative tracking of moving ground target in urban environments[J]. Journal of Guidance, Control and Dynamics, 2008, 31(5): 1360-1371. [28] KOOHIFAR F, KUMBHAR A, GUVENC I. Receding horizon multi-UAV cooperative tracking of moving RF source[J]. IEEE Communications Letters, 2016, PP(99):1-1. [29] HU X, LIU Y, WANG G. Optimal search for moving targets with sensing capabilities using multiple UAVs[J]. Journal of Systems Engineering and Electronics, 2017, 28(3):526-535. [30] ZHANG M, LIU H. Cooperative tracking a moving target using multiple fixed-wing UAVs[J]. Journal of Intelligent & Robotic Systems, 2016, 81(3-4):505-529. [31] MATT W, RICHARD W, ROLF R. Autonomous cooperative geo-location and coordinated tracking of moving targets[C]∥Proc.of the Conference and Exhibit Infotech @ Aerospace, 2007:2852-2861. [32] ZHANG C Y, INSEOK H. Gaussian sum-based maneuvering target tracking using unmanned aerial vehicle[C]∥Proc.of the Guidance,Navigation and Control Conference,2017:1259-1270.
2 回寻式搜索方法
2.1 传统扫描式搜索
2.2 回寻式搜索方法

2.3 multi-UAV并排回寻式搜索模型



2.4 不同搜索方案的参数设置举例
3 multi-UAV回寻搜索优化
3.1 搜索模型参数分析与优化
3.2 搜索参数实例计算
4 仿真分析与比较

5 结 论
猜你喜欢
趣味(数学)(2022年4期)2022-07-02 03:10:02中学生数理化·中考版(2022年6期)2022-06-05 06:49:10中学生数理化·中考版(2021年6期)2021-11-22 07:52:30新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50中学生数理化·高一版(2020年6期)2020-07-25 01:47:24铁道通信信号(2018年12期)2019-01-31 05:36:42中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:33资源再生(2017年4期)2017-06-15 20:28:30中国卫生(2015年5期)2015-11-08 12:09:50