
爬壁机器人创新设计
2018-06-13 08:03黄诚驹
机电产品开发与创新 2018年3期
黄 维,黄诚驹
(武汉职业技术学院,湖北 武汉 430074)
0 引言
机器人技术的不断发展,越来越多的新型仿生机器人陆续得到发明创造,爬行式机器人渐渐走入了人们的视野中。机器人研究的热点依旧是那些有特点的运动特性,其中爬行机器人在很多方面得到了应用,可以替代人类完成很多危险性较高的工作,其结构稳定,是一个很好的研究对象。
高楼玻璃幕墙的清扫工作,无论是从工作场景还是从工作性能要求上,都是普通人力难以胜任的工作。设计一款爬壁机器人,其履带外加电磁及真空吸附盘,支持行进在钢构与玻璃幕墙之间,并且各方面性能好,续航能力强,抗干扰能力强,还具有一定的自我恢复和保护功能,设计中就必须进行机电融合、跨界创新。
1 创新设计背景
近几年来,随着各式各样的机器人在各个领域中的广泛应用和发展,爬壁机器人作为能够在垂直陡壁上进行作业的机器人,以其能够成为高空极限作业的一种自动机械装置的优良特性,越来越受到人们的重视。概括起来,爬壁机器人主要可以应用于以下领域:
(1)在建筑行业可应用于喷涂巨型墙面、安装瓷砖、壁面探伤、壁面修复整容、壁面清洗、擦拭玻璃壁面等。
(2)在消防部门可应用于携带消防器械、传递救援物资、进行高空救援工作。
(3)在核工业可用于对核废液储罐进行视觉检查、测厚及焊缝探伤等危险的工作。
(4)在石化企业可用于对立式金属罐或球形罐的内外壁面进行检查或喷砂除锈、喷漆防腐。
(5)在造船业可用于喷涂船体的内外壁、对船体的内外壁进行检查、船体内外壁清洁。
(6)在抢险救灾上可应用于向高空被困人员运送逃生器械、传递食物水给养等。
(7)在航空航天上,可用于太空探索、空间卫星维修等。
由此可见,爬壁机器人的应用领域广泛涉及民生、核工业、造船工业等,并在这些领域中担任着十分重要的工作,能够促进生产力的提高、改善人民的生活与工作条件。
现有技术中爬壁机器人实现对壁面的吸附有三种方式,即真空吸附、磁吸附和推力吸附。真空吸附方式的爬壁机器人通常采用吸盘吸附法,而其行驶机构一般是履带加多个吸附盘,为了实现行走及吸附需要对多个吸附盘进行气路控制,利用大气压力使机器人吸附在壁面上,现有的气路控制是每个吸盘与气泵之间均有单独的一套吸气与放气回路,这种方式使得爬壁机器人的气路结构太复杂,控制与维修均较麻烦。
2 产品设计方案
2.1 产品设计框架
吸附式履带爬壁清洁机器人产品设计的框架包括:机架、行驶机构、气路控制机构。
其中行驶机构包括轮毂、行走带,行走带上设有吸盘。气路控制机构包括主气管、弹性气管、环形气管、支气管、支撑气管,吸盘通过支撑气管设置于行走带上,支气管布设于行走带上,环形气管套设于行走带上。
支撑气管包括吸气口、放气口,支撑气管通过电磁换向阀切换吸气口与放气口,支撑气管的吸气口与支气管、环形气管、弹性气管、主气管依次相连,主气管与气泵相连,支撑气管的放气口与大气相连。该爬壁机器人的气路控制机构中的吸气回路与放气回路分开,且吸盘共用一个吸气回路,简化了气路结构,使得控制与维修均较方便。
2.2 产品技术方案
吸附式履带爬壁清洁机器人整体结构包括:机架,行驶机构,气路控制机构。行驶机构包括:轮毂、行走带。轮毂包括通过连杆相连的轮毂一、轮毂二,连杆的两端均设有方向传感器,支撑气管上设有角位移传感器。轮毂一、轮毂二均呈齿轮状,行走带的内表面呈锯齿状,呈齿轮状的轮毂一、轮毂二与行走带的呈锯齿状的内表面相啮合。行走带上还设有电磁铁,行驶机构可升降地设置于机架上。吸盘、电磁铁均以环形阵列地方式设置于行走带上,吸盘在行走带的宽度方向上设有两个环形阵列及以上,电磁铁在行走带的宽度方向上设置于相邻的环形阵列的吸盘中间、在行走带的圆周方向上与吸盘交错设置。
3 实例设计及工作原理
下面详细描述该产品创新设计的过程,并附图进行详解,其中以相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。这里设计的对象是:吸附式履带爬壁清洁机器人,其用于清洗玻璃幕墙。
3.1 吸附式履带爬壁清洁机器人的整体结构设计
(1)机架,机架上设有清洗刷。
(2)行驶机构,包括轮毂、行走带。轮毂包括通过连杆相连的轮毂一、轮毂二,行走带绕设于轮毂一、轮毂二上,轮毂一、轮毂二可旋转地设置于机架上,行走带上设有吸盘,吸盘设置于行走带上且沿行走带环形阵列分布。
(3)气路控制机构,包括主气管、弹性气管、环形气管、支气管、支撑气管,吸盘通过支撑气管设置于行走带上,支撑气管包括吸气口、放气口,支撑气管通过电磁换向阀以切换吸气口与放气口,放气口与大气连通,吸气口与支气管的进气口相连通,支气管布设于行走履带上,环形气管套设于行走履带上,支气管的出气口与环形气管的进气口相连通,环形气管的出气口与弹性气管的进气口相连通,弹性气管的出气口通过万向连接管与主气管的进气口相连,主气管的出气口与气泵相连,万向连接管设置于连杆上。

图1 爬壁机器人的整体结构示意图Fig.1 Schematic diagram of the overall structure of wall climbing robot
3.2 可进行自清洗的清洁刷的工作原理
当需要清洁玻璃幕墙时,将该吸附式履带爬壁清洁机器人放入玻璃幕墙上,在玻璃幕墙上行走主要依靠吸盘的吸气与放气来实现,吸气时,电磁换向阀使得支撑气管的吸气口与支气管相连通,此时需要吸附到玻璃幕墙上的吸盘中的空气经吸气口从支撑气管依次通过支气管、环形气管、弹性气管、万向连接管进入主气管,并被气泵吸走,从而使得待吸附的吸盘形成真空达到吸附到玻璃幕墙上的目的;放气时,电磁换向阀使得支撑气管的放气口与大气相连通从而实现待脱离的吸盘放气达到脱离玻璃幕墙的目的。该爬壁机器人需要前进时,前面吸附的吸盘陆续放气脱离玻璃幕墙,与此同时,后面又陆续有新的吸盘通过吸气吸附到玻璃幕墙,随着轮毂不断旋转,行走带从而带着其上不同的吸盘时而吸附时而脱离,从而完成该爬壁机器人的行走。当到达玻璃幕墙需要清洁的区域时,行驶机构停止行进,此时通过清洁刷对等清洁区域进行清洁清。
该吸附式履带爬壁清洁机器人通过气路控制机构实现吸盘的吸气与放气,从而达到行驶机构前进的目的,该气路控制机构将吸盘的吸气回路与放气回路分开,多个吸盘各自通过支撑气管与大气相连来实现放气,多个吸盘通过同一个环形气管、弹性气管、万向连接管、主气管与气泵相连实现吸气,该气路控制机构简化了气路连接、且控制方便。
在图2行驶机构的结构示意图中,连杆的两端均设有方向传感器,支撑气管上设有角位移传感器。当方向传感器检测到与角位移传感器形成吸气夹角时,此时与该角位移传感器相对应的吸盘进入吸气模式,即其准备吸附到幕墙;当方向传感器检测到与角位移传感器形成放气夹角时,此时与该角位移传感器相对应的吸盘进入放气模式,即其准备脱离幕墙。方向传感器与角位移传感器的共同作用使得行驶机构行走得更灵敏。
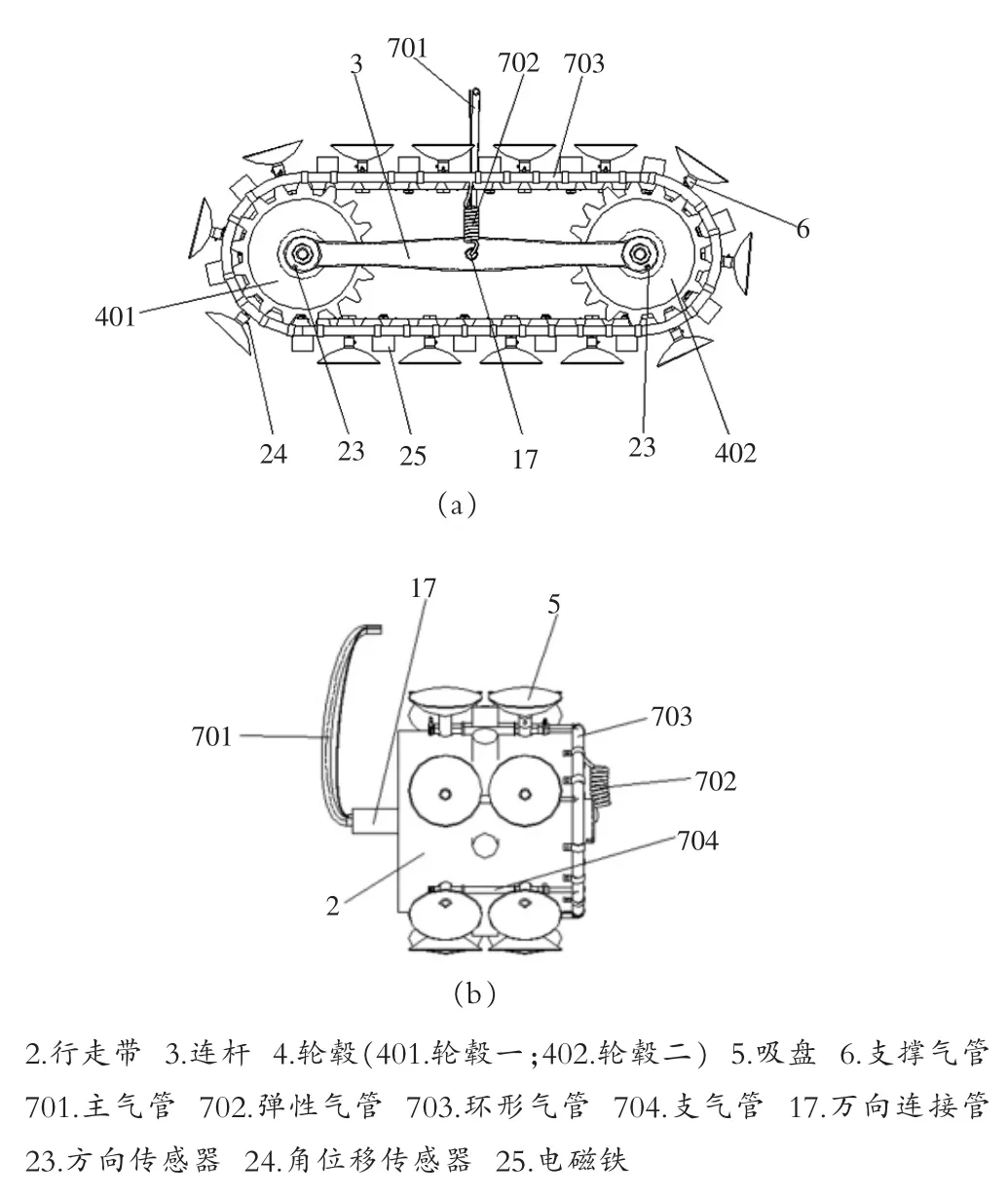
图2 行驶机构的结构示意图Fig.2 Schematic diagram of the structure of driving mechanism
轮毂一、轮毂二均呈齿轮状,行走带的内表面呈锯齿状,呈齿轮状的轮毂一、轮毂二与行走带的呈锯齿状的内表面相啮合。该结构使得轮毂与行走带啮合得更紧,从而增强行使机构的安全性与可靠性。
行走带上还设有电磁铁,行驶机构可升降地设置于机架上。行走带上同时设有吸盘与电磁铁,使得该爬壁机器人不仅能在玻璃幕墙上行走,其也可以在金属材质的幕墙上行走;行驶机构可升降地设置于机架上,不仅能方便地实现该吸附式履带爬壁清洁机器人的转向,而且在遇到不平整的幕墙时行驶机构可进行自动调整以保证整机的平稳。
吸盘、电磁铁均以环形阵列地方式设置于行走带上,吸盘在行走带的宽度方向上设有两个环形阵列,电磁铁在行走带的宽度方向上设置于相邻的环形阵列的吸盘中间、在行走带的圆周方向上与吸盘交错设置。该结构使得单独使用吸盘吸附或电磁铁吸附时二者互不干扰,提高了吸附的安全性。
本实例中的吸附式履带爬壁清洁机器人的行走带上同时包括吸盘与电磁铁,从设计角度来说,行走带上也可以只有吸盘。
4 结束语
在人工智能的时代背景下,机器人是一项热点,人们越来越多的采用机器人来替代人类的工作,尤其是在工作强度大、重复性强、危险性高相关的领域里,机器人得到越来越多的应用,我们可以以此为切入点,结合机器人的结构特点进行产品创新设计。
(本文所属的系列产品设计已获得的国家专利有:专利号201610284763.2,一种发明专利,发明名称为“一种吸附式履带爬壁清洁机器人”;专利号201620388036.6,一种实用新型专利,发明名称为“一种可进行自清洗的清洗刷”;专利号201620388594.2,一种实用新型专利,发明名称为“一种爬壁机器人”;专利号201620388610.8,一种实用新型专利,发明名称为“一种可自由转向的爬壁机器人”)
[1]Karl T Ulrich,Steven D Eppinger.Product design and development[M].McGraw-Hill Education,2012.
[2]彭春江,武利生,李元宗.履带式机器人运动学分析[J].太原:太原理工大学学报,2004.
[3]马俊峰,唐立平.气动爬行机器人设计[J].北京:液压与气动,2010.
[4]成伟明,唐振民,赵春霞.微小型履带式机器人路径跟踪控制器设计[J].北京:计算机工程与应用,2007.
猜你喜欢
力学学报(2022年6期)2022-07-10
机械工程师(2022年3期)2022-03-24
兵器装备工程学报(2021年3期)2021-04-09
石油化工建设(2019年6期)2020-01-16
科学导报·学术(2018年11期)2018-10-21
机电元件(2018年4期)2018-08-09
中国医疗设备(2018年7期)2018-07-18
现代农机(2018年1期)2018-02-11
科学与财富(2017年18期)2017-07-09
振动、测试与诊断(2014年5期)2014-03-01
